ExPrIS: Knowledge-Level Expectations as Priors for Object Interpretation from Sensor Data
作者: Marian Renz, Martin Günther, Felix Igelbrink, Oscar Lima, Martin Atzmueller
分类: cs.RO, cs.CV
发布日期: 2026-01-21
备注: This preprint has not undergone peer review or any post-submission improvements or corrections. The Version of Record of this article is published in KI - Künstliche Intelligenz, and is available online at https://doi.org/10.1007/s13218-026-00901-7
期刊: Künstl Intell (2026)
DOI: 10.1007/s13218-026-00901-7
💡 一句话要点
ExPrIS:利用知识先验提升机器人传感器数据中的物体理解
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 机器人视觉 物体识别 语义场景理解 图神经网络 知识图谱
📋 核心要点
- 现有基于深度学习的物体识别方法缺乏语义一致性,未能充分利用环境中的先验知识。
- ExPrIS项目提出利用知识先验,通过构建3D语义场景图并结合异构图神经网络来实现更鲁棒的物体理解。
- 该方法通过整合上下文先验和语义知识,增强了场景理解的时间一致性,并计划在移动机器人平台上进行集成。
📝 摘要(中文)
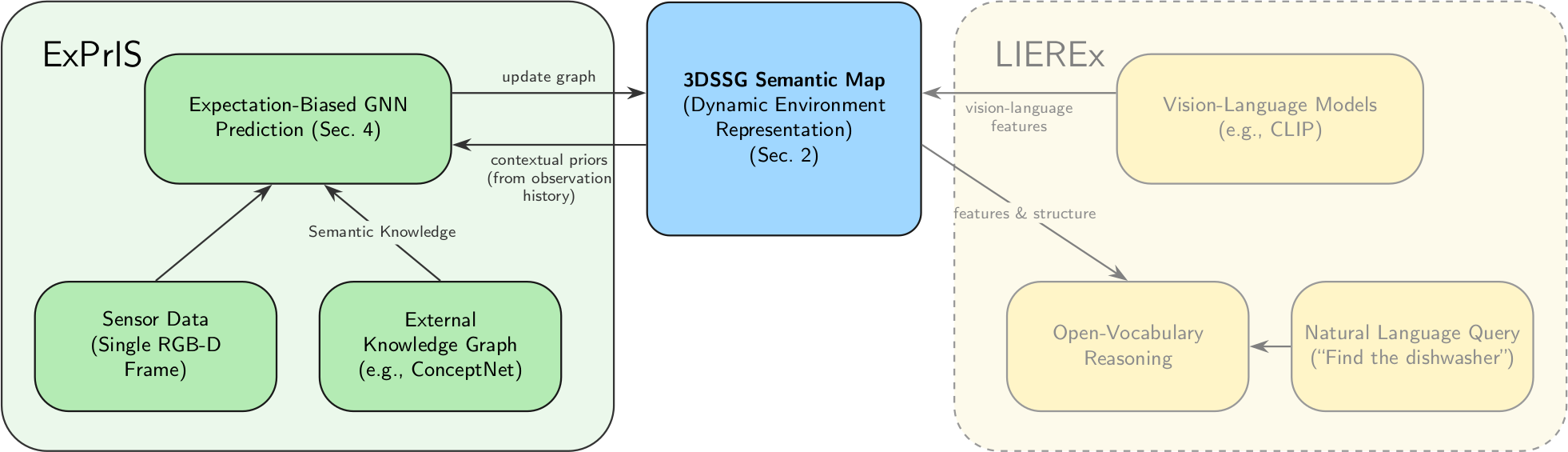
深度学习显著提升了机器人物体识别能力,但纯数据驱动方法常缺乏语义一致性,未能有效利用环境中已有的知识。ExPrIS项目旨在通过知识先验改进传感器数据中的物体理解。该方法基于增量构建的3D语义场景图(3DSSG),整合来自过去观测的上下文先验和来自ConceptNet等外部图的语义知识。这些知识被嵌入到异构图神经网络(GNN)中,以创建具有期望偏差的推理过程。该方法超越了静态的逐帧分析,从而增强了场景理解的鲁棒性和时间一致性。报告详细介绍了该架构、评估以及在移动机器人平台上的集成计划。
🔬 方法详解
问题定义:现有基于深度学习的物体识别方法在机器人应用中存在局限性,主要体现在两个方面:一是缺乏对场景语义的理解,容易产生不一致的识别结果;二是未能有效利用环境中已有的知识,例如物体之间的关系、场景的上下文信息等。这些问题导致识别结果的鲁棒性较差,难以适应复杂多变的环境。
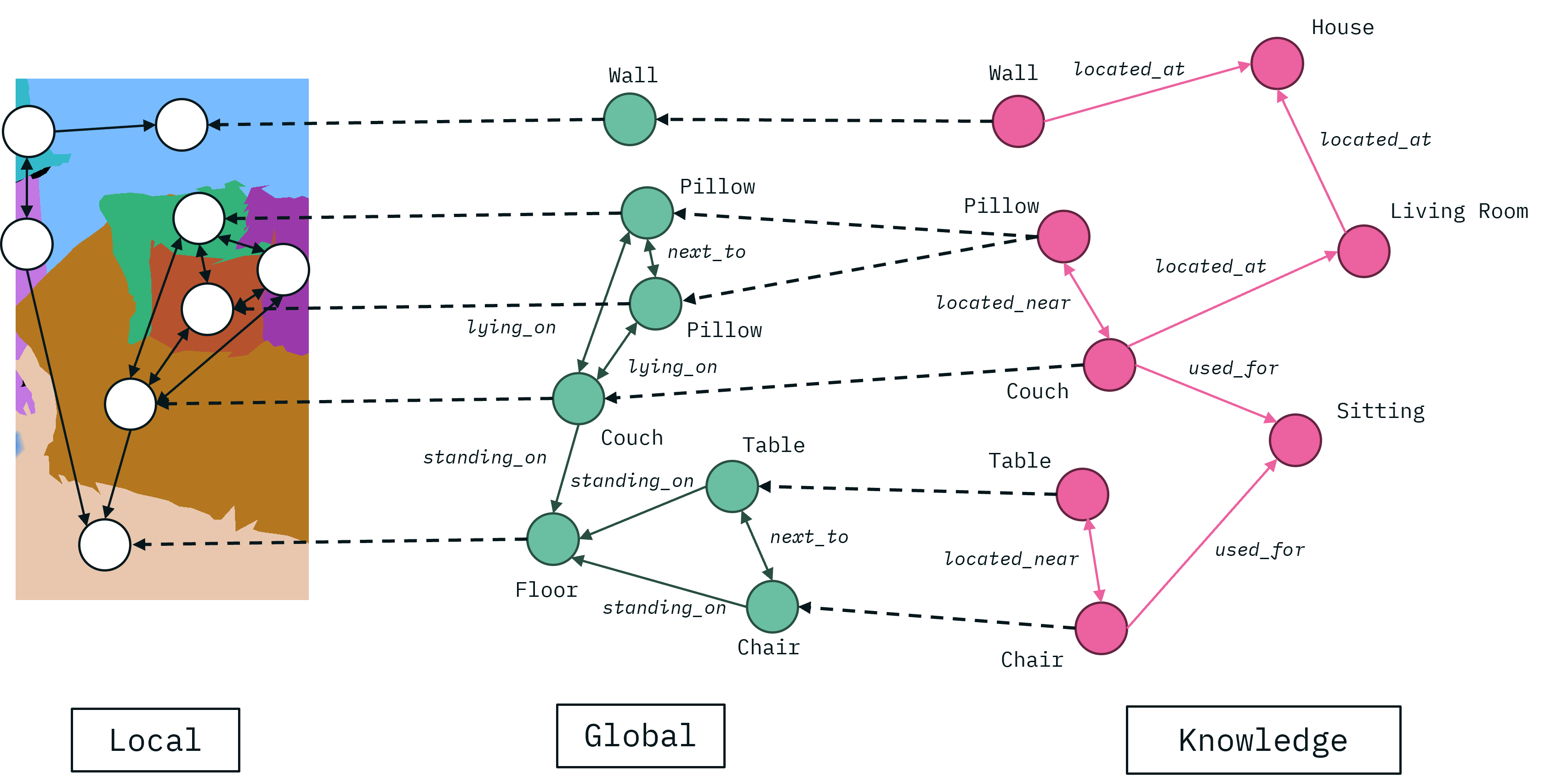
核心思路:ExPrIS项目的核心思路是将知识先验融入到物体识别过程中,从而提高识别的准确性和鲁棒性。具体来说,该方法利用两种类型的知识先验:一是来自过去观测的上下文先验,例如物体通常出现在哪些场景中;二是来自外部知识图谱(如ConceptNet)的语义知识,例如物体之间的关系。通过将这些知识融入到识别过程中,可以有效地减少歧义,提高识别的可靠性。
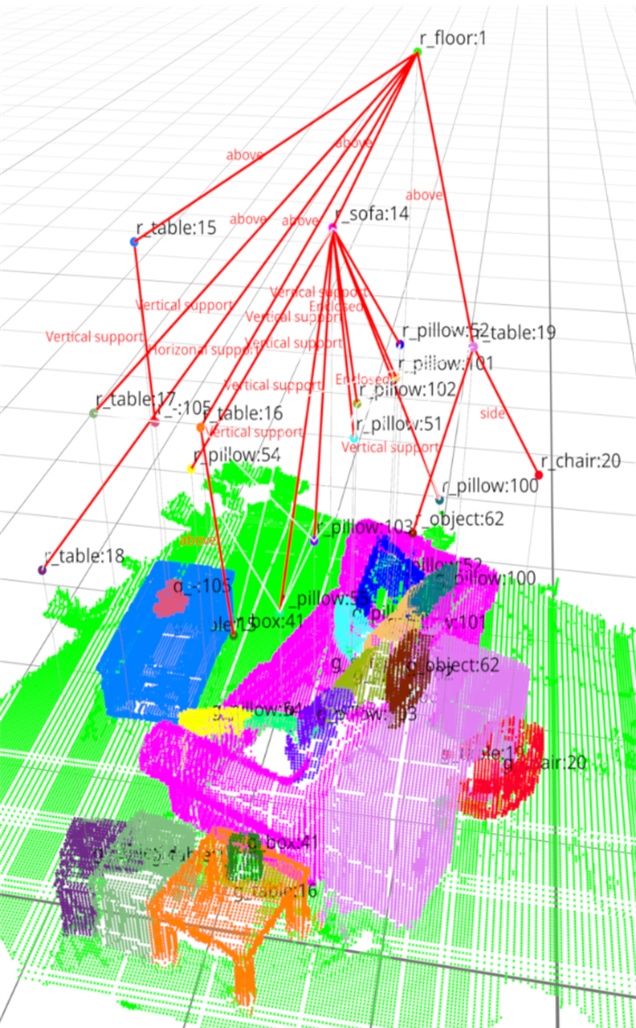
技术框架:ExPrIS的技术框架主要包括以下几个模块:1) 3D语义场景图(3DSSG)构建模块,用于增量式地构建场景的3D表示,并记录物体之间的关系;2) 知识先验提取模块,用于从过去观测和外部知识图谱中提取上下文先验和语义知识;3) 异构图神经网络(GNN)推理模块,用于将3DSSG和知识先验融合在一起,进行物体识别和场景理解。整个流程是增量式的,随着机器人不断探索环境,3DSSG会不断更新,知识先验也会不断完善,从而提高识别的性能。
关键创新:ExPrIS项目的关键创新在于将知识先验融入到图神经网络中,从而实现了一种具有期望偏差的推理过程。与传统的图神经网络方法相比,ExPrIS能够更好地利用环境中的知识,从而提高识别的准确性和鲁棒性。此外,ExPrIS还采用了增量式的场景图构建方法,能够有效地处理大规模的场景数据。
关键设计:在异构图神经网络的设计方面,ExPrIS采用了多层图卷积网络,每一层都能够学习不同类型的节点和边之间的关系。在损失函数的设计方面,ExPrIS采用了交叉熵损失函数,用于衡量识别结果的准确性。此外,ExPrIS还采用了正则化技术,以防止过拟合。
🖼️ 关键图片
📊 实验亮点
论文重点介绍了ExPrIS的架构设计,但实验结果的细节信息未知。报告中提到对架构进行了评估,并计划在移动机器人平台上进行集成,但具体的性能数据、对比基线以及提升幅度等信息未给出。因此,实验亮点部分暂时无法详细描述。
🎯 应用场景
ExPrIS技术可应用于各种机器人场景理解任务,例如家庭服务机器人、工业机器人、自动驾驶等。通过提高物体识别的准确性和鲁棒性,可以使机器人更好地理解周围环境,从而实现更智能、更可靠的自主行为。该技术还有助于构建更完善的机器人认知系统,促进人机协作。
📄 摘要(原文)
While deep learning has significantly advanced robotic object recognition, purely data-driven approaches often lack semantic consistency and fail to leverage valuable, pre-existing knowledge about the environment. This report presents the ExPrIS project, which addresses this challenge by investigating how knowledge-level expectations can serve as to improve object interpretation from sensor data. Our approach is based on the incremental construction of a 3D Semantic Scene Graph (3DSSG). We integrate expectations from two sources: contextual priors from past observations and semantic knowledge from external graphs like ConceptNet. These are embedded into a heterogeneous Graph Neural Network (GNN) to create an expectation-biased inference process. This method moves beyond static, frame-by-frame analysis to enhance the robustness and consistency of scene understanding over time. The report details this architecture, its evaluation, and outlines its planned integration on a mobile robotic platform.