Graph-Based Adaptive Planning for Coordinated Dual-Arm Robotic Disassembly of Electronic Devices (eGRAP)
作者: Adip Ranjan Das, Maria Koskinopoulou
分类: cs.RO
发布日期: 2026-01-21
备注: 7 Pages, 8 Figures, 5 Tables
💡 一句话要点
提出基于图的自适应规划方法以实现电子设备的双臂机器人拆解
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 电子废物回收 双臂机器人 自适应规划 图结构 动态调度 视觉识别 拆解技术
📋 核心要点
- 电子废物的快速增长与低回收率形成鲜明对比,现有拆解方法效率低下且缺乏灵活性。
- 提出的eGRAP方法通过图结构和动态调度实现双臂机器人在拆解过程中的自适应规划与执行。
- 实验结果表明,eGRAP在3.5英寸硬盘的拆解中实现了高成功率和高效的周期时间,展示了其优越性。
📝 摘要(中文)
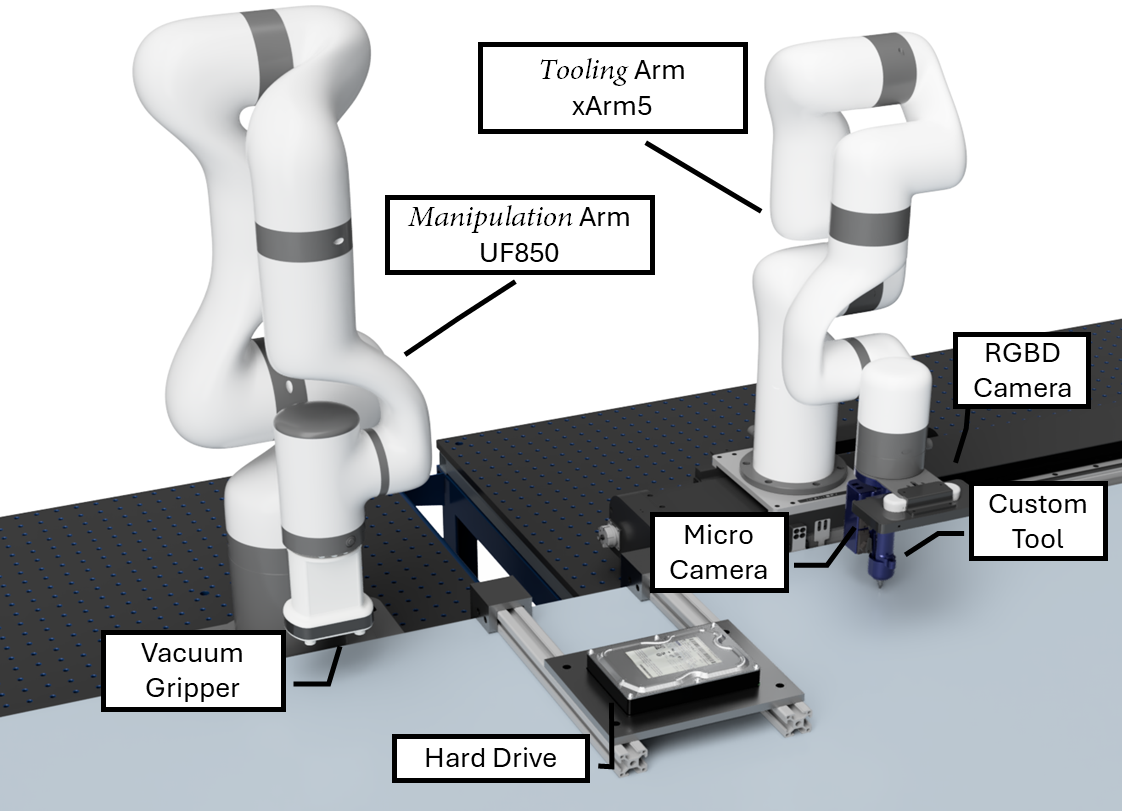
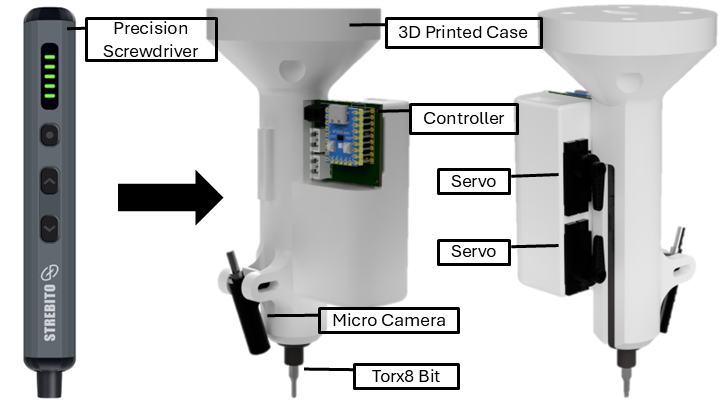
随着电子废物的快速增长,回收率却依然较低。本文提出了一种电子设备图形自适应规划(eGRAP)方法,结合视觉、动态规划和双臂执行,实现自主拆解。配备摄像头的机械臂识别零件并估计其姿态,定向图编码了拆解顺序。调度器利用图的拓扑排序选择有效步骤并分配给两个机械臂,实现独立任务的并行执行。我们在3.5英寸硬盘上演示了eGRAP,系统在拆解过程中实时更新图和计划,实验结果显示每个硬盘的完整拆解成功率高且周期时间高效,展示了该方法在实时自适应协调双臂任务中的能力。
🔬 方法详解
问题定义:本文旨在解决电子设备拆解中存在的效率低、灵活性不足的问题。现有方法往往无法实时适应拆解过程中的变化,导致拆解效率低下。
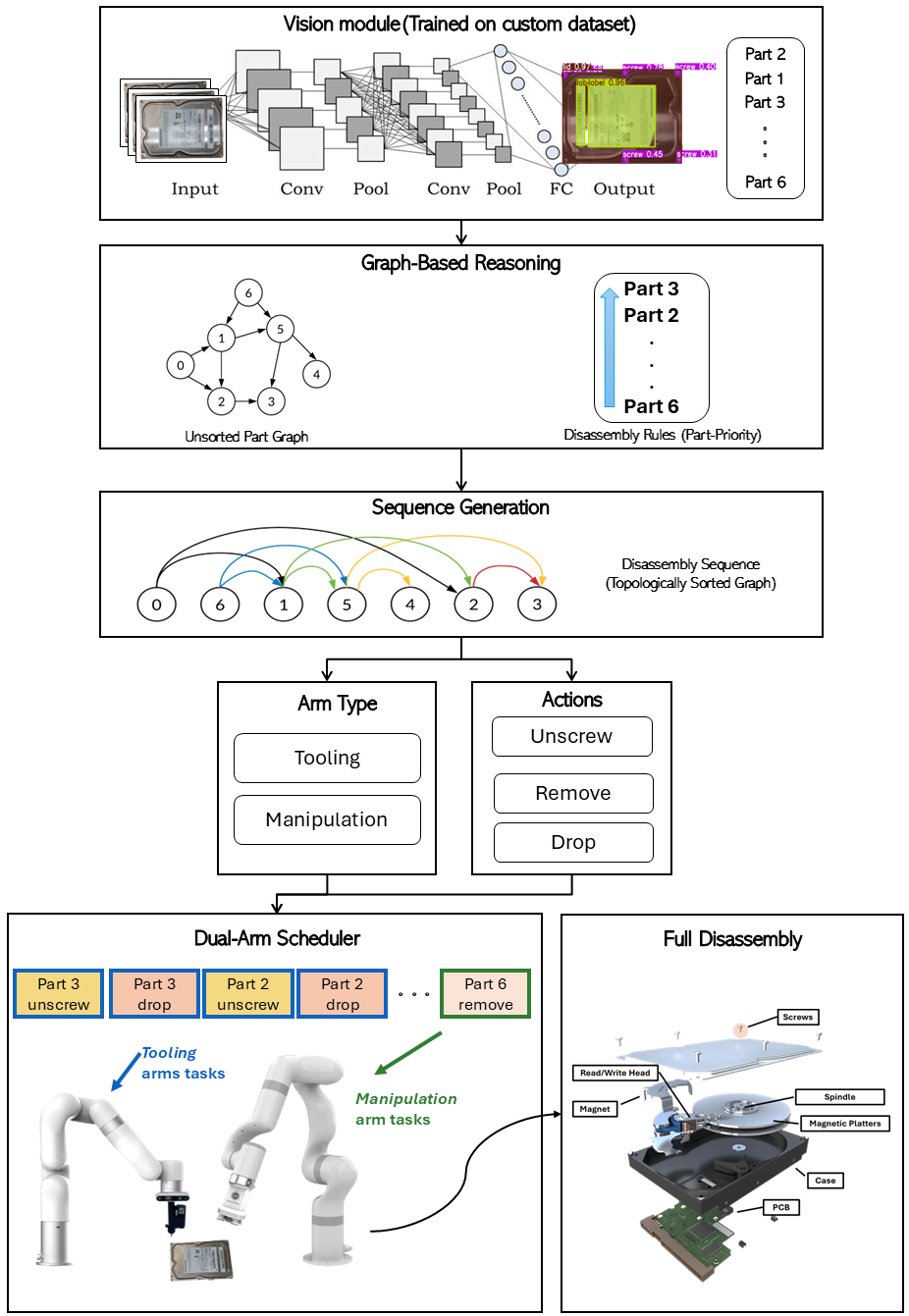
核心思路:eGRAP方法通过构建一个定向图来编码拆解顺序,结合视觉识别和动态调度,使得双臂机器人能够在拆解过程中自适应调整任务。这样的设计使得机器人能够独立执行任务并实现并行处理。
技术框架:整体架构包括三个主要模块:视觉识别模块用于识别和定位零件,图结构模块用于编码拆解顺序,调度模块用于根据图的拓扑排序选择和分配任务。
关键创新:最重要的创新在于将图结构与动态调度结合,允许机器人在拆解过程中实时更新任务计划。这一方法与传统的线性拆解方法有本质区别,显著提高了灵活性和效率。
关键设计:在设计中,使用了基于深度相机的视觉识别系统来获取零件信息,调度算法基于图的拓扑排序进行任务选择,确保了任务的有效分配和执行。
🖼️ 关键图片
📊 实验亮点
实验结果显示,eGRAP在3.5英寸硬盘的拆解中实现了100%的成功率,且拆解周期时间显著低于传统方法,展示了其在实时自适应协调双臂任务中的卓越性能。
🎯 应用场景
该研究具有广泛的应用潜力,尤其在电子废物回收和机器人自动化拆解领域。通过提高拆解效率和灵活性,eGRAP方法能够有效促进电子产品的可持续回收,减少环境污染,并为未来的智能制造和机器人技术发展提供新的思路。
📄 摘要(原文)
E-waste is growing rapidly while recycling rates remain low. We propose an electronic-device Graph-based Adaptive Planning (eGRAP) that integrates vision, dynamic planning, and dual-arm execution for autonomous disassembly. A camera-equipped arm identifies parts and estimates their poses, and a directed graph encodes which parts must be removed first. A scheduler uses topological ordering of this graph to select valid next steps and assign them to two robot arms, allowing independent tasks to run in parallel. One arm carries a screwdriver (with an eye-in-hand depth camera) and the other holds or handles components. We demonstrate eGRAP on 3.5in hard drives: as parts are unscrewed and removed, the system updates its graph and plan online. Experiments show consistent full disassembly of each HDD, with high success rates and efficient cycle times, illustrating the method's ability to adaptively coordinate dual-arm tasks in real time.