A Brain-inspired Embodied Intelligence for Fluid and Fast Reflexive Robotics Control
作者: Weiyu Guo, He Zhang, Pengteng Li, Tiefu Cai, Ziyang Chen, Yandong Guo, Xiao He, Yongkui Yang, Ying Sun, Hui Xiong
分类: cs.RO, cs.AI
发布日期: 2026-01-21
💡 一句话要点
提出NeuroVLA,一种脑启发的具身智能框架,用于快速灵敏的机器人控制
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 具身智能 神经形态计算 机器人控制 生物启发 快速反射
📋 核心要点
- 现有机器人策略难以复制生物运动中固有的动态稳定性、快速响应性和时间记忆能力,这是当前具身智能研究面临的核心挑战。
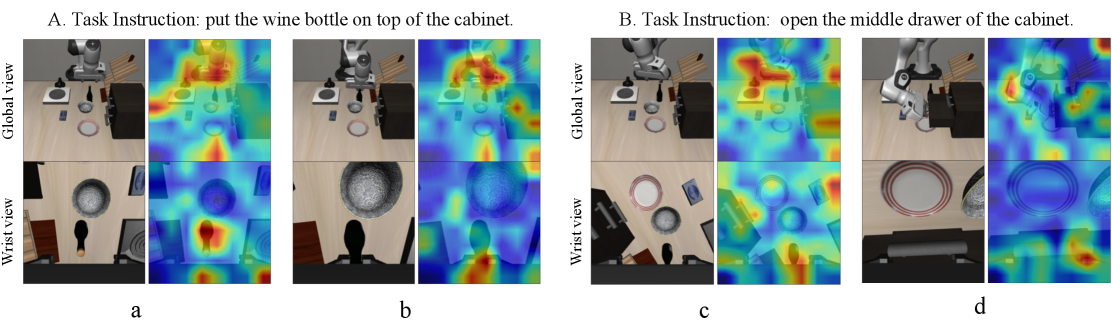
- NeuroVLA框架模仿大脑皮层、小脑和脊髓的结构,通过高层规划、小脑稳定和脊髓快速动作生成,实现生物般的运动控制。
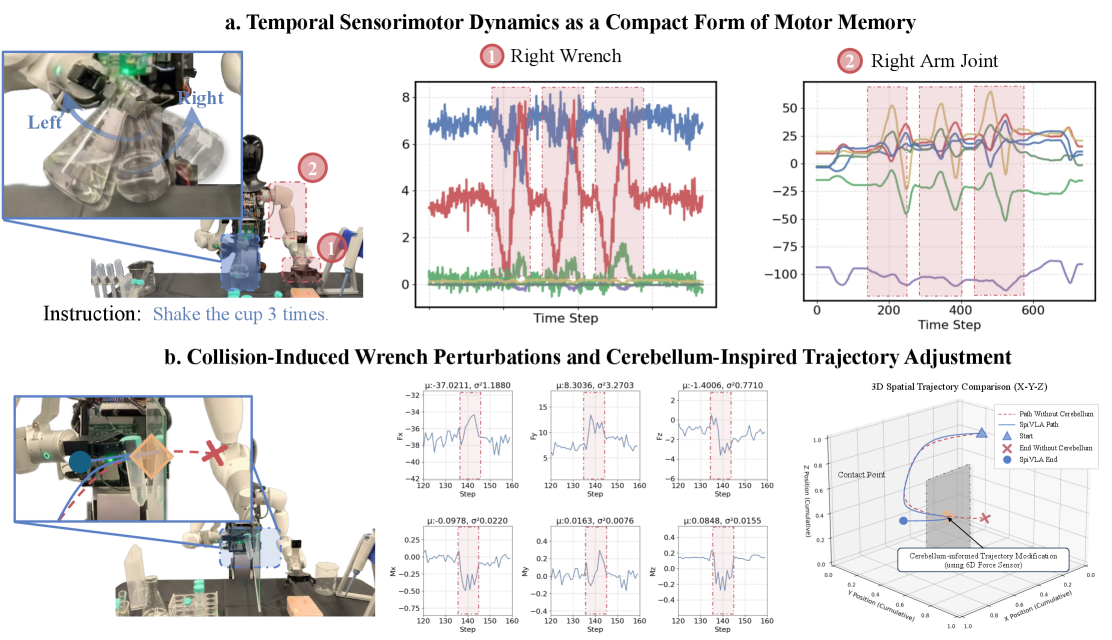
- NeuroVLA在物理机器人上实现了最先进的性能,展现了生物运动特征,如抑制抖动、节能、时间记忆和快速安全反射。
📝 摘要(中文)
本文提出了一种名为NeuroVLA(Neuromorphic Vision-Language-Action)的框架,该框架模仿大脑皮层、小脑和脊髓之间的生物神经系统结构组织,旨在实现快速、灵敏的机器人控制。与当前依赖大规模数据和模型参数的具身智能方法不同,NeuroVLA采用系统级的生物启发设计:高层模型规划目标,自适应小脑模块利用高频传感器反馈稳定运动,生物启发的脊髓层生成闪电般快速的动作。NeuroVLA是首个在物理机器人上部署神经形态VLA的系统,实现了最先进的性能。实验观察到,该框架无需额外数据或特殊指导即可涌现出生物运动特征,例如抑制机器人手臂的抖动、显著节能(神经形态处理器上仅0.4瓦)、展现时间记忆能力,并在不到20毫秒内触发安全反射。
🔬 方法详解
问题定义:现有机器人控制方法通常依赖于大量数据和模型参数,难以实现生物系统所具备的快速学习、动态稳定性和灵敏的反射能力。尤其是在资源受限的场景下,如何让机器人能够像生物一样快速适应并做出反应是一个关键问题。
核心思路:NeuroVLA的核心思路是模仿生物神经系统的结构和功能,将控制系统分解为三个层次:高层规划(皮层)、运动稳定(小脑)和快速动作生成(脊髓)。通过这种分层结构,系统可以有效地处理复杂任务,并在高频反馈下实现快速、稳定的控制。
技术框架:NeuroVLA框架包含三个主要模块:1) 高层模型:负责接收视觉和语言输入,规划机器人需要达成的目标。2) 自适应小脑模块:利用高频传感器反馈,对运动进行实时稳定,抑制抖动等不稳定因素。3) 生物启发脊髓层:负责生成快速的动作指令,实现快速的反射行为。这三个模块协同工作,形成一个完整的控制回路。
关键创新:NeuroVLA的关键创新在于其系统级的生物启发设计,将大脑皮层、小脑和脊髓的功能映射到机器人控制系统中。这种设计使得系统能够涌现出生物运动的特性,如快速反应、动态稳定和时间记忆,而无需额外的数据或特殊指导。此外,该框架是首个在物理机器人上部署神经形态VLA的系统。
关键设计:NeuroVLA的具体实现细节包括:高层模型可以使用Transformer等现有模型进行目标规划;自适应小脑模块可能采用自适应滤波器或强化学习方法,根据传感器反馈调整控制参数;生物启发脊髓层可能使用预定义的动作基元或神经形态计算来实现快速动作生成。论文中提到使用了神经形态处理器,这表明在硬件层面也进行了优化,以实现低功耗和快速计算。
🖼️ 关键图片

📊 实验亮点
NeuroVLA在物理机器人上的实验表明,该框架能够有效地抑制机器人手臂的抖动,显著降低功耗(在神经形态处理器上仅为0.4瓦),展现出时间记忆能力,并在不到20毫秒内触发安全反射。这些结果表明,NeuroVLA在性能上达到了最先进水平,并成功地将生物运动的特性迁移到了机器人控制中。
🎯 应用场景
NeuroVLA具有广泛的应用前景,例如在资源受限的环境中进行快速响应的机器人操作,在医疗康复领域开发更自然、更安全的辅助机器人,以及在灾难救援等紧急情况下实现快速部署和高效作业。该研究为开发更智能、更适应性强的机器人系统提供了新的思路。
📄 摘要(原文)
Recent advances in embodied intelligence have leveraged massive scaling of data and model parameters to master natural-language command following and multi-task control. In contrast, biological systems demonstrate an innate ability to acquire skills rapidly from sparse experience. Crucially, current robotic policies struggle to replicate the dynamic stability, reflexive responsiveness, and temporal memory inherent in biological motion. Here we present Neuromorphic Vision-Language-Action (NeuroVLA), a framework that mimics the structural organization of the bio-nervous system between the cortex, cerebellum, and spinal cord. We adopt a system-level bio-inspired design: a high-level model plans goals, an adaptive cerebellum module stabilizes motion using high-frequency sensors feedback, and a bio-inspired spinal layer executes lightning-fast actions generation. NeuroVLA represents the first deployment of a neuromorphic VLA on physical robotics, achieving state-of-the-art performance. We observe the emergence of biological motor characteristics without additional data or special guidance: it stops the shaking in robotic arms, saves significant energy(only 0.4w on Neuromorphic Processor), shows temporal memory ability and triggers safety reflexes in less than 20 milliseconds.