UniCon: A Unified System for Efficient Robot Learning Transfers
作者: Yunfeng Lin, Li Xu, Yong Yu, Jiangmiao Pang, Weinan Zhang
分类: cs.RO, cs.SE
发布日期: 2026-01-21
备注: in submission, under review
💡 一句话要点
UniCon:一种用于高效机器人学习迁移的统一系统
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 机器人学习 跨平台迁移 统一框架 机器人控制 模块化设计
📋 核心要点
- 现有方法难以在异构机器人上部署学习控制器,面临平台差异和中间件效率低下的挑战。
- UniCon通过标准化状态、控制流程和工具,将工作流程分解为可重用组件,实现跨平台即插即用。
- 实验表明,UniCon减少了代码冗余,提高了推理效率,并成功部署在多个机器人模型上。
📝 摘要(中文)
本文提出UniCon,一个轻量级框架,旨在解决跨异构机器人部署学习控制器时面临的平台差异、接口不一致和中间件效率低下的问题。UniCon通过标准化状态、控制流程和跨平台工具,将工作流程分解为具有可重用组件的执行图,并将系统状态与控制逻辑分离,从而实现跨各种机器人形态的即插即用部署。与传统中间件不同,UniCon优先考虑效率,通过批量化、矢量化数据流,最大限度地减少通信开销并提高推理延迟。这种模块化、面向数据的方法能够以最小的重新设计实现无缝的仿真到真实环境的迁移。实验表明,UniCon减少了工作流程迁移时的代码冗余,并且与基于ROS的系统相比,实现了更高的推理效率。UniCon已成功集成到正在进行的研究项目中,部署在来自7家制造商的12个以上的机器人模型上,证明了其在实际场景中的有效性。
🔬 方法详解
问题定义:现有基于学习的机器人控制器难以在不同机器人平台上迁移,主要痛点在于不同机器人平台的状态表示、控制接口和通信方式各不相同,导致大量重复开发和调试工作。传统的机器人中间件(如ROS)虽然提供了一定的通用性,但在数据传输效率和推理延迟方面存在瓶颈,难以满足高性能控制的需求。
核心思路:UniCon的核心思路是将机器人控制流程解耦为可重用的组件,并采用统一的数据表示和通信机制,从而实现跨平台的即插即用。通过将系统状态与控制逻辑分离,可以方便地将控制策略迁移到不同的机器人平台上,而无需修改控制策略本身。同时,UniCon采用批量化和矢量化的数据流,最大限度地减少通信开销,提高推理效率。
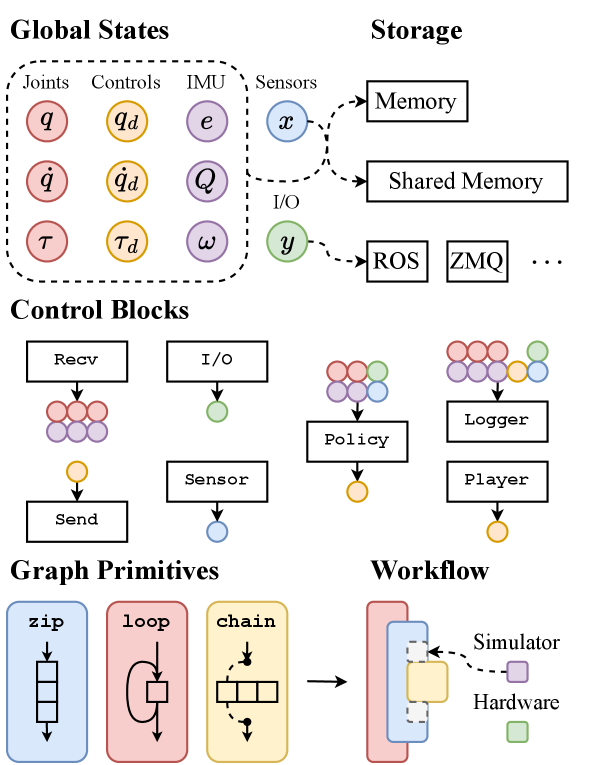
技术框架:UniCon的整体架构包括以下几个主要模块:1) 状态标准化模块:将不同机器人平台的状态信息转换为统一的表示形式。2) 控制流程分解模块:将复杂的控制任务分解为可重用的组件,例如运动规划、轨迹跟踪等。3) 执行图构建模块:将分解后的组件组合成执行图,描述控制流程的依赖关系。4) 数据流优化模块:采用批量化和矢量化的数据流,提高通信效率。5) 平台适配模块:提供统一的接口,方便控制策略在不同机器人平台上部署。
关键创新:UniCon最重要的技术创新点在于其模块化和面向数据的设计。与传统的机器人中间件相比,UniCon更加注重数据流的效率和控制流程的灵活性。通过将控制流程分解为可重用的组件,可以方便地构建复杂的控制任务,并实现跨平台的迁移。此外,UniCon采用批量化和矢量化的数据流,最大限度地减少通信开销,提高推理效率。
关键设计:UniCon的关键设计包括:1) 统一的状态表示:采用标准化的状态向量来描述机器人的状态信息,例如位置、速度、姿态等。2) 可重用的控制组件:将常用的控制算法封装成可重用的组件,例如PID控制器、运动规划器等。3) 批量化和矢量化的数据流:采用批量化和矢量化的数据传输方式,减少通信开销。4) 平台适配层:提供统一的接口,方便控制策略在不同机器人平台上部署。
🖼️ 关键图片

📊 实验亮点
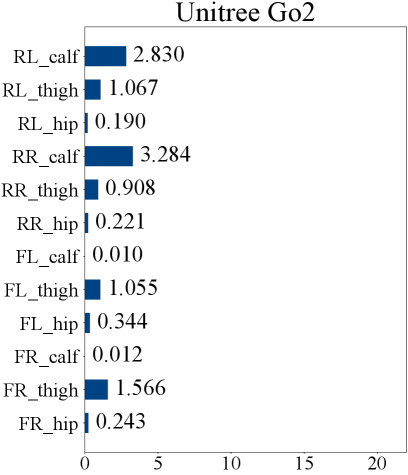
实验结果表明,UniCon在工作流程迁移时减少了代码冗余,并实现了比基于ROS的系统更高的推理效率。具体来说,UniCon在多个机器人模型上的部署验证了其跨平台适应性。此外,UniCon集成了到正在进行的研究项目中,证明了其在实际场景中的有效性。具体性能数据(如推理延迟降低百分比)未知,但总体而言,UniCon在效率和可移植性方面表现出显著优势。
🎯 应用场景
UniCon可广泛应用于机器人学习、自动化控制和智能制造等领域。它能够简化跨平台机器人控制器的开发和部署,降低开发成本,提高开发效率。该框架的模块化设计和高效的数据处理能力,使其能够支持复杂的机器人任务,并促进机器人技术在各个行业的应用。未来,UniCon有望成为机器人领域重要的基础设施。
📄 摘要(原文)
Deploying learning-based controllers across heterogeneous robots is challenging due to platform differences, inconsistent interfaces, and inefficient middleware. To address these issues, we present UniCon, a lightweight framework that standardizes states, control flow, and instrumentation across platforms. It decomposes workflows into execution graphs with reusable components, separating system states from control logic to enable plug-and-play deployment across various robot morphologies. Unlike traditional middleware, it prioritizes efficiency through batched, vectorized data flow, minimizing communication overhead and improving inference latency. This modular, data-oriented approach enables seamless sim-to-real transfer with minimal re-engineering. We demonstrate that UniCon reduces code redundancy when transferring workflows and achieves higher inference efficiency compared to ROS-based systems. Deployed on over 12 robot models from 7 manufacturers, it has been successfully integrated into ongoing research projects, proving its effectiveness in real-world scenarios.