SandWorm: Event-based Visuotactile Perception with Active Vibration for Screw-Actuated Robot in Granular Media
作者: Shoujie Li, Changqing Guo, Junhao Gong, Chenxin Liang, Wenhua Ding, Wenbo Ding
分类: cs.RO
发布日期: 2026-01-20
备注: Accepted by IEEE Transactions on Robotics
💡 一句话要点
SandWorm:基于事件相机的振动触觉感知系统,用于颗粒介质中螺杆驱动机器人
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 颗粒介质 视觉触觉感知 事件相机 机器人 主动振动 仿生机器人 地下勘探
📋 核心要点
- 颗粒介质中感知困难,现有方法难以应对不可预测的颗粒动力学,导致机器人难以在其中稳定运动和有效作业。
- SandWorm机器人结合了螺杆驱动和蠕动运动,并配备了新型的基于事件的视觉触觉传感器SWTac,通过主动振动和弹簧隔离机制提升感知能力。
- 实验表明,SWTac具有高分辨率的纹理感知能力和准确的力估计能力,SandWorm机器人能够在复杂颗粒介质中实现高效的移动和作业。
📝 摘要(中文)
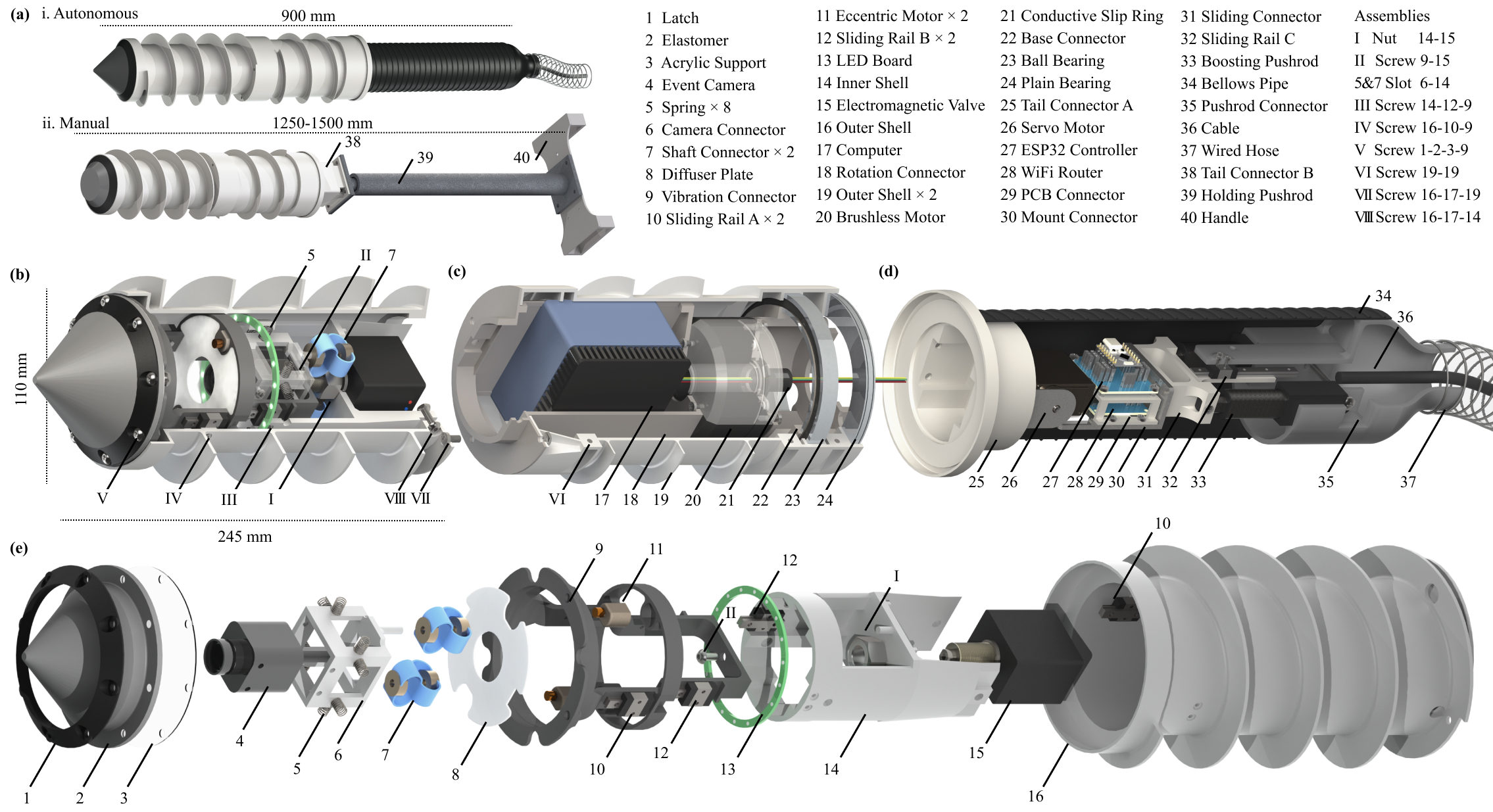
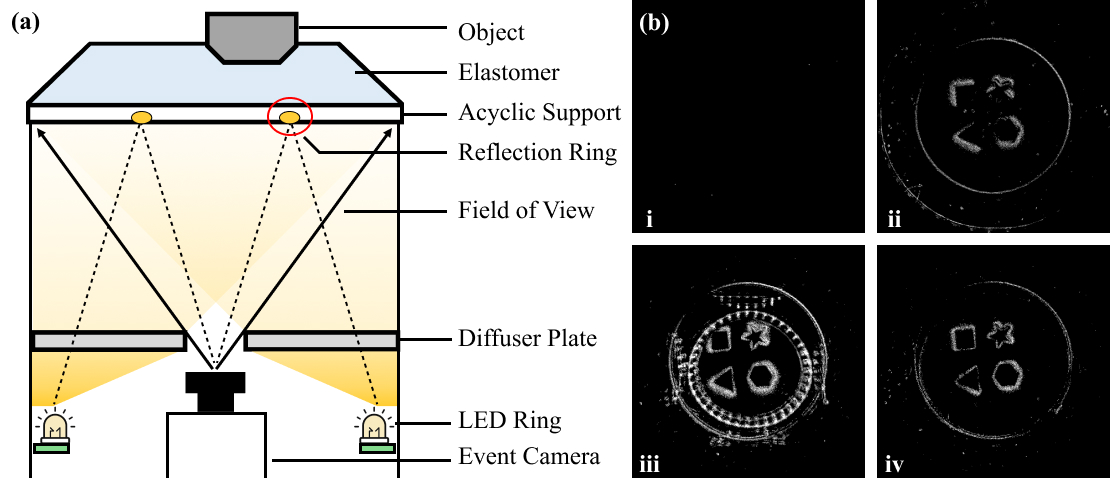
本文提出了一种名为SandWorm的仿生螺杆驱动机器人,该机器人通过蠕动运动增强了在颗粒介质中的移动能力。同时,开发了一种新型的基于事件的视觉触觉传感器SWTac,该传感器具有主动振动弹性体。事件相机通过弹簧隔离机制与振动机械解耦,从而能够对动态和静态物体进行高质量的触觉成像。在算法设计方面,提出了一种IMU引导的时域滤波器来增强成像一致性,使MSNR提高了24%。此外,系统地优化了SWTac的振动参数、事件相机设置和弹性体属性。受非对称边缘特征的启发,还实现了基于U-Net的接触面估计。实验验证表明,SWTac具有0.2毫米的纹理分辨率、98%的石块分类准确率和0.15牛顿的力估计误差,而SandWorm在具有挑战性的地形中表现出通用的运动能力(高达12.5毫米/秒),成功地在复杂的颗粒介质中执行了管道疏浚和地下勘探(观察到90%的成功率)。现场实验进一步证实了该系统的实际性能。
🔬 方法详解
问题定义:在颗粒介质中进行感知和运动是一个具有挑战性的问题。由于颗粒介质的动态特性难以预测,传统的视觉和触觉传感器难以提供可靠的信息,导致机器人难以在其中稳定运动和有效作业。现有的方法通常依赖于复杂的模型或大量的训练数据,泛化能力较差。
核心思路:本文的核心思路是设计一种仿生机器人,结合螺杆驱动和蠕动运动,以适应颗粒介质的特性。同时,开发一种新型的基于事件的视觉触觉传感器,通过主动振动和弹簧隔离机制,提高感知能力。通过算法优化,提高成像质量和感知精度。
技术框架:SandWorm系统的整体架构包括:1) 螺杆驱动和蠕动运动机构,用于在颗粒介质中移动;2) SWTac视觉触觉传感器,用于感知环境信息;3) IMU引导的时域滤波器,用于提高成像一致性;4) 基于U-Net的接触面估计模块,用于估计接触面信息。整个流程是,机器人通过螺杆驱动和蠕动运动在颗粒介质中移动,SWTac传感器感知环境信息,IMU引导的时域滤波器提高成像质量,基于U-Net的接触面估计模块估计接触面信息,最后机器人根据感知信息进行决策和控制。
关键创新:该论文的关键创新点在于:1) 提出了一种新型的基于事件的视觉触觉传感器SWTac,该传感器具有主动振动弹性体和弹簧隔离机制,能够对动态和静态物体进行高质量的触觉成像;2) 提出了一种IMU引导的时域滤波器,用于提高成像一致性;3) 系统地优化了SWTac的振动参数、事件相机设置和弹性体属性。
关键设计:在SWTac传感器设计中,关键参数包括振动频率、振幅、弹性体材料和形状等。在算法设计中,关键细节包括IMU引导的时域滤波器的参数设置、U-Net的网络结构和损失函数等。具体而言,IMU用于提供运动先验,辅助事件相机进行时间滤波,减少运动模糊。U-Net网络用于从事件数据中分割出接触区域,从而进行力估计和物体识别。
🖼️ 关键图片

📊 实验亮点
实验结果表明,SWTac传感器具有0.2毫米的纹理分辨率,能够准确识别细微的纹理特征。石块分类准确率达到98%,表明SWTac传感器具有良好的物体识别能力。力估计误差为0.15牛顿,表明SWTac传感器具有较高的力感知精度。SandWorm机器人在具有挑战性的地形中表现出通用的运动能力,移动速度高达12.5毫米/秒,并在复杂的颗粒介质中成功执行了管道疏浚和地下勘探任务,成功率达到90%。
🎯 应用场景
该研究成果可应用于多种领域,包括:1) 管道疏浚:SandWorm机器人可以用于疏浚水下管道,清理淤泥和杂物;2) 地下勘探:SandWorm机器人可以用于勘探地下资源,例如矿产和石油;3) 搜救:SandWorm机器人可以用于在废墟中搜寻幸存者。该研究具有重要的实际价值和广阔的应用前景。
📄 摘要(原文)
Perception in granular media remains challenging due to unpredictable particle dynamics. To address this challenge, we present SandWorm, a biomimetic screw-actuated robot augmented by peristaltic motion to enhance locomotion, and SWTac, a novel event-based visuotactile sensor with an actively vibrated elastomer. The event camera is mechanically decoupled from vibrations by a spring isolation mechanism, enabling high-quality tactile imaging of both dynamic and stationary objects. For algorithm design, we propose an IMU-guided temporal filter to enhance imaging consistency, improving MSNR by 24%. Moreover, we systematically optimize SWTac with vibration parameters, event camera settings and elastomer properties. Motivated by asymmetric edge features, we also implement contact surface estimation by U-Net. Experimental validation demonstrates SWTac's 0.2 mm texture resolution, 98% stone classification accuracy, and 0.15 N force estimation error, while SandWorm demonstrates versatile locomotion (up to 12.5 mm/s) in challenging terrains, successfully executes pipeline dredging and subsurface exploration in complex granular media (observed 90% success rate). Field experiments further confirm the system's practical performance.