Sample Efficient Learning of Body-Environment Interaction of an Under-Actuated System
作者: Zvi Chapnik, Yizhar Or, Shai Revzen
分类: cs.RO
发布日期: 2026-01-20
💡 一句话要点
研究欠驱动机器人与环境交互,提出基于运动基元的运动策略学习方法
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 欠驱动机器人 运动基元图 几何力学 运动策略学习 环境交互
📋 核心要点
- 欠驱动机器人与环境的复杂交互难以建模,尤其是在高摩擦环境中,如何高效学习运动策略是一个挑战。
- 论文提出通过学习“运动基元图”来建模机器人与环境的交互,该图描述了形状变化与身体运动速度之间的关系。
- 实验对比了四种建模方法,揭示了模型复杂度与数据量之间的权衡关系,为实际应用中模型选择提供了指导。
📝 摘要(中文)
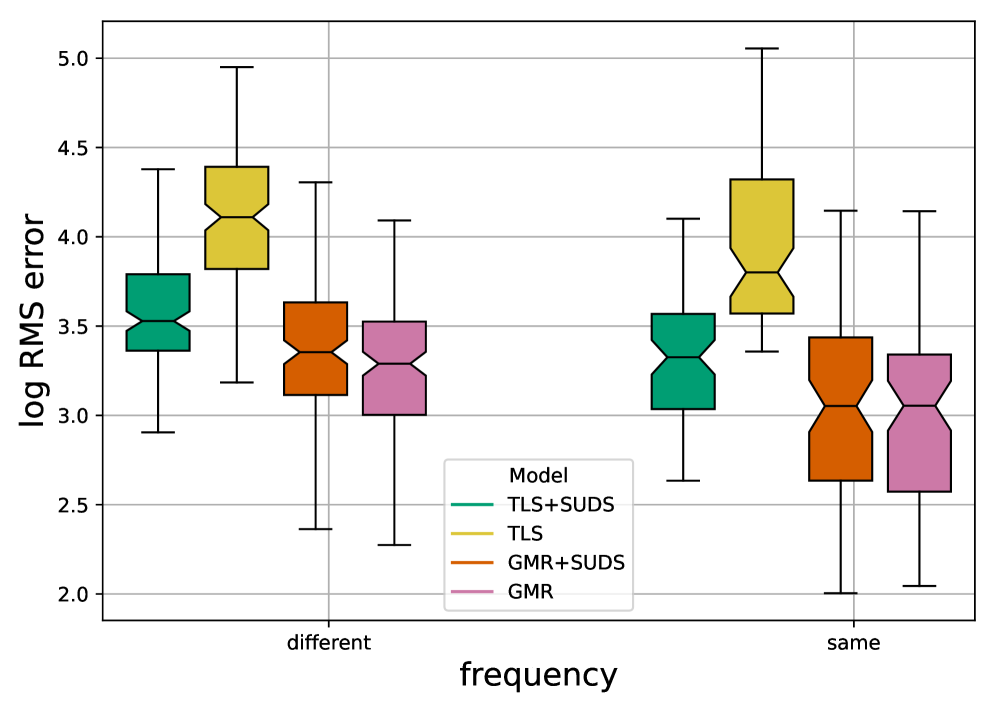
本文研究了如何从运动跟踪数据中学习欠驱动机器人与环境的交互,特别是机器人通过改变自身形状在具有高摩擦环境中运动的能力。在这种环境中,整个交互过程可以用“运动基元图”来描述。论文比较了四种建模方法,评估它们在同一步态、不同步态和不同速度下,根据形状变化预测身体速度的能力。结果表明,简单的方法在小训练数据集上表现更好,而更复杂的方法在有更多训练数据时表现更优,这体现了一种权衡。
🔬 方法详解
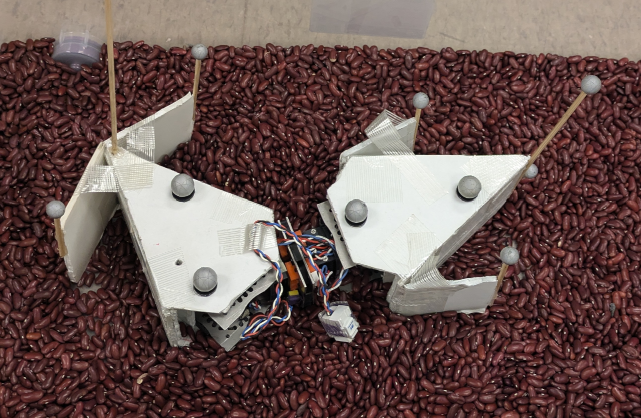
问题定义:论文旨在解决欠驱动机器人在与环境交互时,如何从有限的运动数据中学习有效的运动策略的问题。现有方法难以准确建模机器人与环境之间复杂的非线性关系,尤其是在高摩擦环境下,传统的动力学模型往往不够精确。
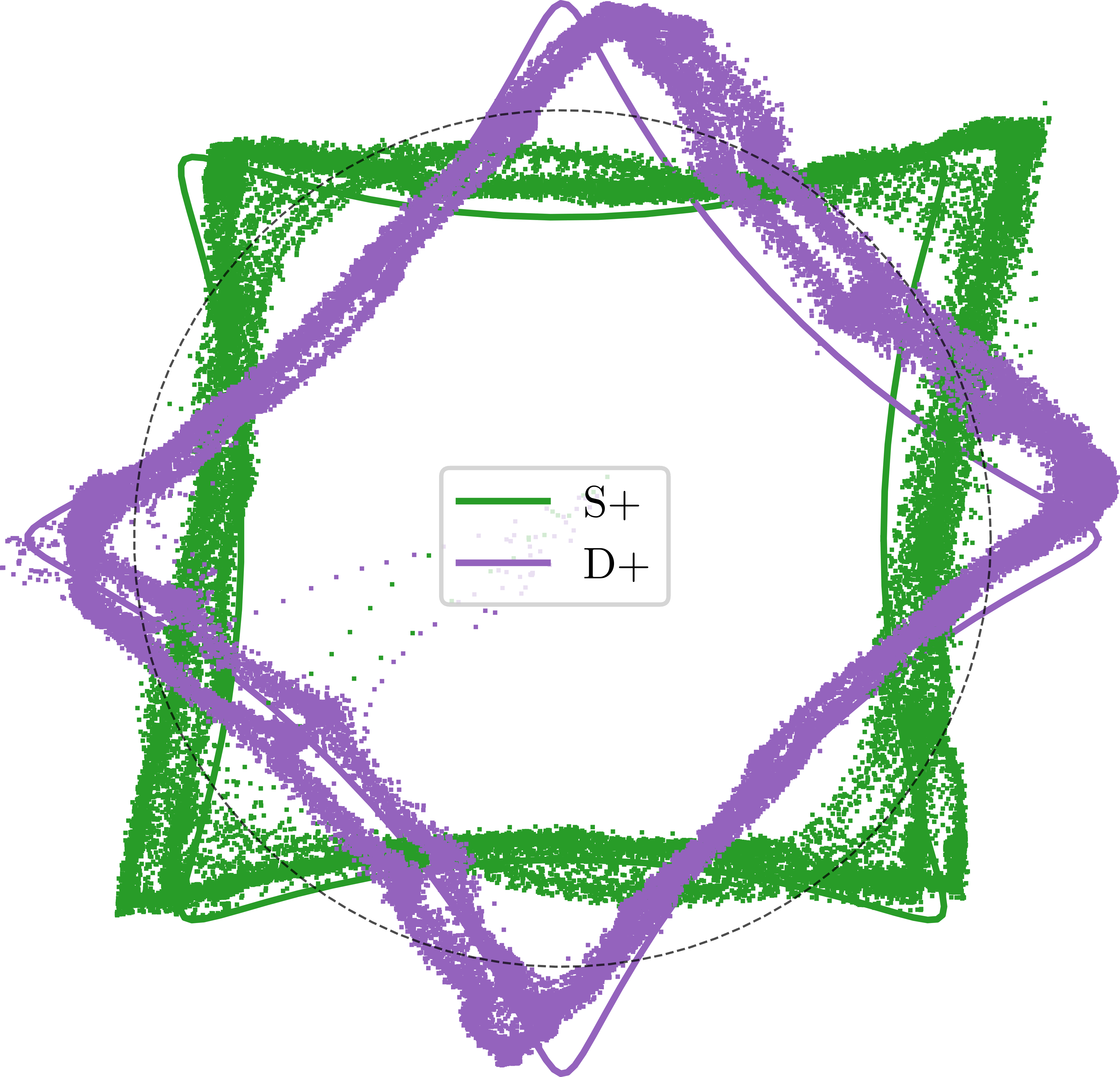
核心思路:论文的核心思路是利用几何力学中的“运动基元图”概念,将机器人形状的变化直接映射到身体的运动速度。这种方法避免了直接建模复杂的环境交互力,而是通过学习数据中的模式来建立形状变化与运动之间的关系。
技术框架:整体框架包括数据采集和模型训练两个阶段。首先,通过运动捕捉系统获取机器人的运动数据,包括形状变化和身体速度。然后,使用四种不同的建模方法(具体方法未知)来学习运动基元图,即建立形状变化到身体速度的映射关系。最后,通过预测身体速度来评估模型的性能。
关键创新:论文的关键创新在于将运动基元图的概念应用于欠驱动机器人的运动策略学习,并比较了不同建模方法在不同数据量下的性能。这种方法能够有效地处理机器人与环境之间复杂的交互,并为欠驱动机器人的运动控制提供了一种新的思路。
关键设计:论文比较了四种建模方法,但具体的技术细节未知。可能涉及的关键设计包括:用于描述机器人形状变化的参数化方法、用于建立形状变化到身体速度映射关系的函数形式(例如,线性模型、神经网络等)、以及用于训练模型的损失函数和优化算法。具体参数设置未知。
🖼️ 关键图片
📊 实验亮点
实验结果表明,简单模型在小数据集上表现更好,而复杂模型在大数据集上表现更优。这一发现揭示了模型复杂度和数据量之间的权衡关系,为实际应用中模型选择提供了指导。具体的性能数据和对比基线未知,但研究强调了数据量对模型性能的影响。
🎯 应用场景
该研究成果可应用于欠驱动机器人的运动控制、步态设计和自主导航等领域。例如,可以利用学习到的运动基元图来设计机器人的运动轨迹,使其能够有效地在复杂环境中移动。此外,该方法还可以用于生物运动的研究,帮助理解生物如何利用身体形状的变化来实现运动。
📄 摘要(原文)
Geometric mechanics provides valuable insights into how biological and robotic systems use changes in shape to move by mechanically interacting with their environment. In high-friction environments it provides that the entire interaction is captured by the ``motility map''. Here we compare methods for learning the motility map from motion tracking data of a physical robot created specifically to test these methods by having under-actuated degrees of freedom and a hard to model interaction with its substrate. We compared four modeling approaches in terms of their ability to predict body velocity from shape change within the same gait, across gaits, and across speeds. Our results show a trade-off between simpler methods which are superior on small training datasets, and more sophisticated methods, which are superior when more training data is available.