Static Is Not Enough: A Comparative Study of VR and SpaceMouse in Static and Dynamic Teleoperation Tasks
作者: Yijun Zhou, Muhan Hou, Kim Baraka
分类: cs.RO
发布日期: 2026-01-19
备注: 5 pages, 5 figures. Accepted in HRI'26 (Late-Breaking Reports track) in 12 Jan, 2026
💡 一句话要点
对比VR与SpaceMouse在静态和动态遥操作任务中的性能差异,并开源VR遥操作界面。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 遥操作 虚拟现实 SpaceMouse 动态任务 静态任务
📋 核心要点
- 现有遥操作研究主要关注静态任务,忽略了动态任务对界面的不同需求,导致静态任务的评估结果难以推广。
- 论文对比了VR控制器和SpaceMouse在静态和动态遥操作任务中的性能,旨在找到更适合动态任务的遥操作界面。
- 实验结果表明,VR控制器在动态任务中具有更高的成功率、更短的执行时间和更低的工作量,并开源了VR遥操作界面。
📝 摘要(中文)
模仿学习依赖于高质量的演示数据,而遥操作是收集这些数据的主要方式,因此遥操作界面的选择至关重要。以往的研究主要集中在静态任务上,即离散的、分段的运动。然而,演示数据也包括需要反应控制的动态任务。由于动态任务对界面提出了根本不同的要求,因此从静态任务评估中获得的见解无法推广。为了解决这一差距,我们进行了一项受试者内研究,比较了VR控制器和SpaceMouse在两个静态和两个动态任务中的表现(N=25)。我们评估了成功率、任务持续时间、累积成功率,以及NASA-TLX、SUS和开放式反馈。结果表明,VR在统计学上具有显著优势:更高的成功率,尤其是在动态任务中;更短的成功执行时间;更早的成功尝试;显著更低的工作量和更高的可用性。由于现有的VR遥操作系统很少开源或适用于动态任务,我们发布了我们的VR界面以填补这一空白。
🔬 方法详解
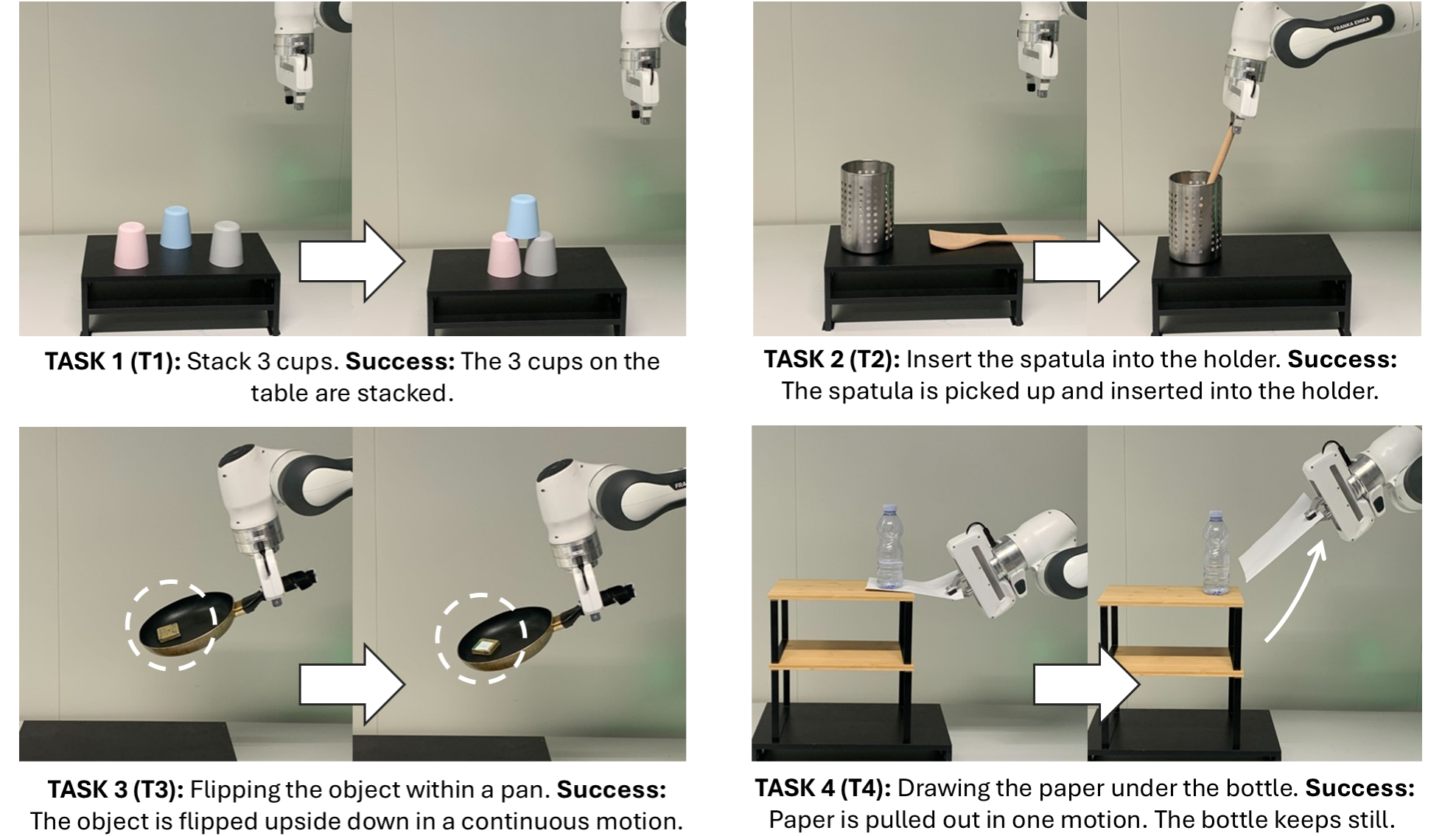
问题定义:论文旨在解决遥操作界面选择的问题,特别是在动态任务场景下。现有研究主要集中在静态任务,例如抓取、放置等离散动作,而忽略了动态任务,例如追踪运动目标、维持平衡等需要实时反馈和连续控制的任务。现有针对静态任务设计的遥操作界面可能不适用于动态任务,导致性能下降和操作困难。
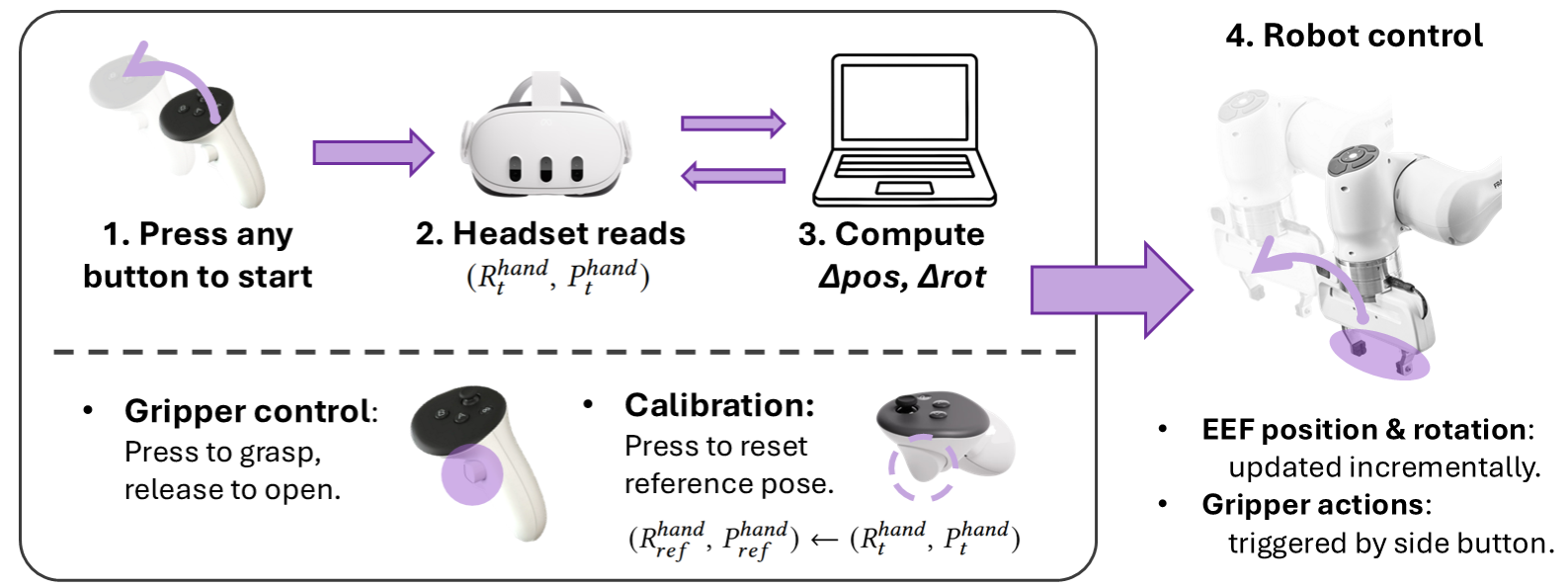
核心思路:论文的核心思路是通过对比实验,评估不同遥操作界面(VR控制器和SpaceMouse)在静态和动态任务中的性能差异,从而找到更适合动态任务的界面。作者认为,VR控制器具有更直观的操作方式和更强的沉浸感,可能更适合需要实时反馈和连续控制的动态任务。
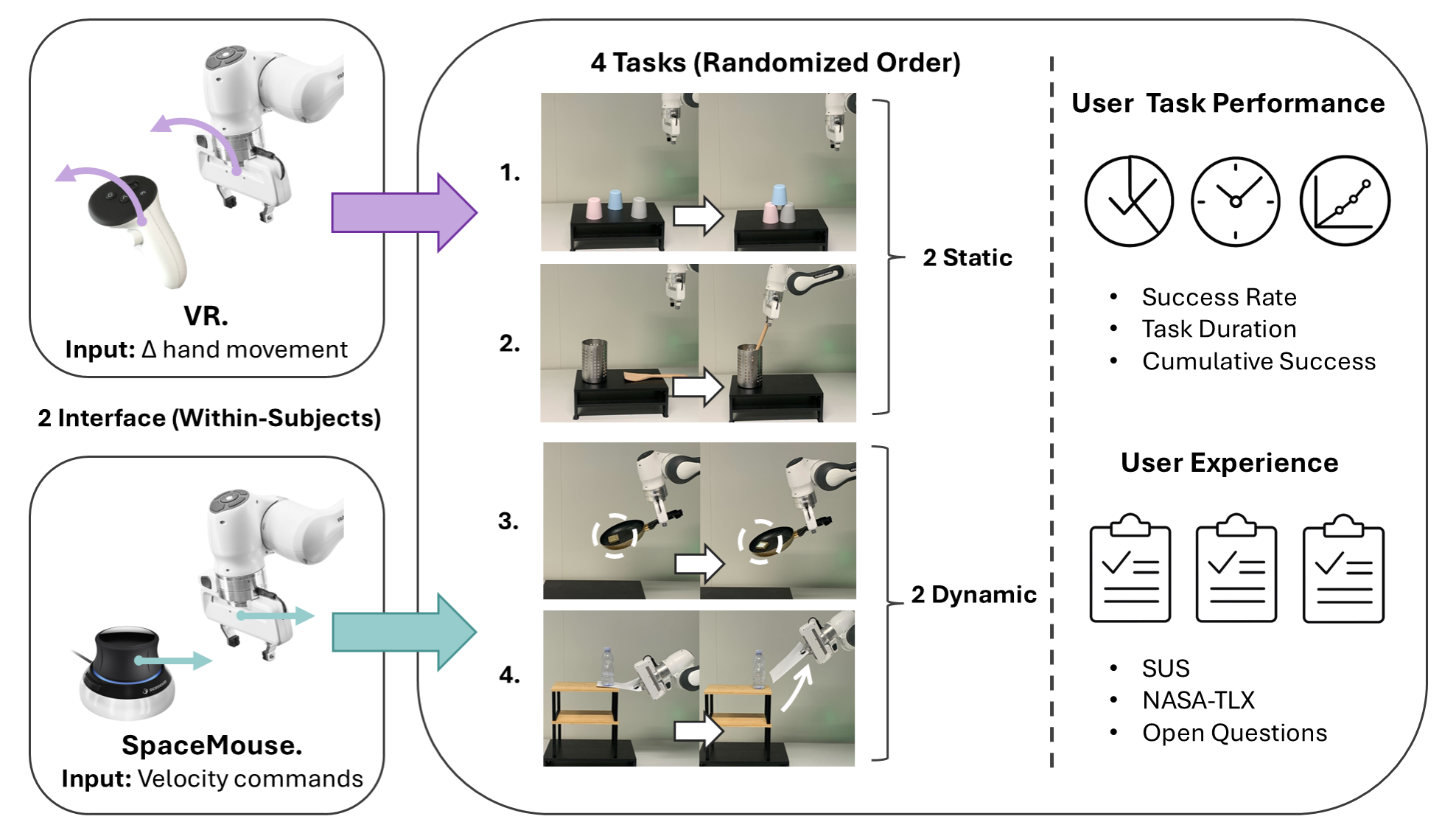
技术框架:论文采用受试者内实验设计,招募25名参与者,分别使用VR控制器和SpaceMouse完成两类静态任务和两类动态任务。实验过程中,记录参与者的成功率、任务持续时间、累积成功率等客观指标,并使用NASA-TLX和SUS量表评估主观工作量和可用性。此外,还收集了参与者的开放式反馈,以了解他们对不同界面的使用体验。
关键创新:论文的关键创新在于关注了动态遥操作任务,并对比了VR控制器和SpaceMouse在动态任务中的性能差异。以往研究主要关注静态任务,忽略了动态任务对界面的不同需求。此外,论文还开源了VR遥操作界面,为后续研究提供了便利。
关键设计:论文的关键设计包括:1) 选择具有代表性的静态和动态任务;2) 使用标准化的评估指标(成功率、任务持续时间、NASA-TLX、SUS);3) 采用受试者内实验设计,减少个体差异的影响;4) 开源VR遥操作界面,方便后续研究。
🖼️ 关键图片
📊 实验亮点
实验结果表明,VR控制器在动态任务中具有显著优势,成功率更高,执行时间更短,工作量更低,可用性更高。具体来说,VR控制器在动态任务中的成功率比SpaceMouse高约20%,执行时间缩短约15%,NASA-TLX得分降低约10%,SUS得分提高约12%。这些数据表明,VR控制器更适合需要实时反馈和连续控制的动态遥操作任务。
🎯 应用场景
该研究成果可应用于机器人远程控制、虚拟现实交互、游戏开发等领域。例如,在危险环境中,可以使用VR遥操作界面控制机器人进行救援或排爆任务。在医疗领域,医生可以使用VR遥操作界面进行远程手术。在游戏开发中,可以利用VR控制器提供更沉浸式的游戏体验。该研究为遥操作界面的设计和选择提供了指导,有助于提高遥操作系统的性能和用户体验。
📄 摘要(原文)
Imitation learning relies on high-quality demonstrations, and teleoperation is a primary way to collect them, making teleoperation interface choice crucial for the data. Prior work mainly focused on static tasks, i.e., discrete, segmented motions, yet demonstrations also include dynamic tasks requiring reactive control. As dynamic tasks impose fundamentally different interface demands, insights from static-task evaluations cannot generalize. To address this gap, we conduct a within-subjects study comparing a VR controller and a SpaceMouse across two static and two dynamic tasks ($N=25$). We assess success rate, task duration, cumulative success, alongside NASA-TLX, SUS, and open-ended feedback. Results show statistically significant advantages for VR: higher success rates, particularly on dynamic tasks, shorter successful execution times across tasks, and earlier successes across attempts, with significantly lower workload and higher usability. As existing VR teleoperation systems are rarely open-source or suited for dynamic tasks, we release our VR interface to fill this gap.