Active Inference-Driven World Modeling for Adaptive UAV Swarm Trajectory Design
作者: Kaleem Arshid, Ali Krayani, Lucio Marcenaro, David Martin Gomez, Carlo Regazzoni
分类: cs.RO, cs.AI, eess.SP
发布日期: 2026-01-19
备注: This paper has been accepted for presentation at the 2026 IEEE International Conference on Acoustics, Speech, and Signal Processing (IEEE ICASSP 2026) Workshop: 'Multi-Modal Signal Processing and AI for Communications and Sensing in 6G and Beyond (MuSiC-6GB)'
💡 一句话要点
提出基于主动推理的世界建模方法,用于自适应无人机群轨迹设计
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 无人机集群 主动推理 世界模型 轨迹规划 自适应控制
📋 核心要点
- 现有无人机群轨迹规划方法难以适应动态环境,且缺乏有效的分布式决策机制。
- 论文提出基于主动推理的世界模型,使无人机能够根据环境变化自适应地调整轨迹。
- 实验表明,该方法在收敛速度、稳定性和安全性方面优于Q学习,验证了其有效性。
📝 摘要(中文)
本文提出了一种基于主动推理的无人机群自主轨迹设计框架。该方法融合了概率推理和自学习,实现了分布式任务分配、航路排序和运动规划。利用遗传算法与斥力(GA-RF)生成的专家轨迹训练一个分层世界模型,该模型捕捉了任务、航路和运动层面的集群行为。在线运行期间,无人机通过最小化当前信念与模型预测状态之间的差异来推断动作,从而能够自适应地响应动态环境。仿真结果表明,与Q学习相比,该方法收敛速度更快、稳定性更高、导航更安全,证明了所提出的框架在智能无人机群控制中的可扩展性和认知基础。
🔬 方法详解
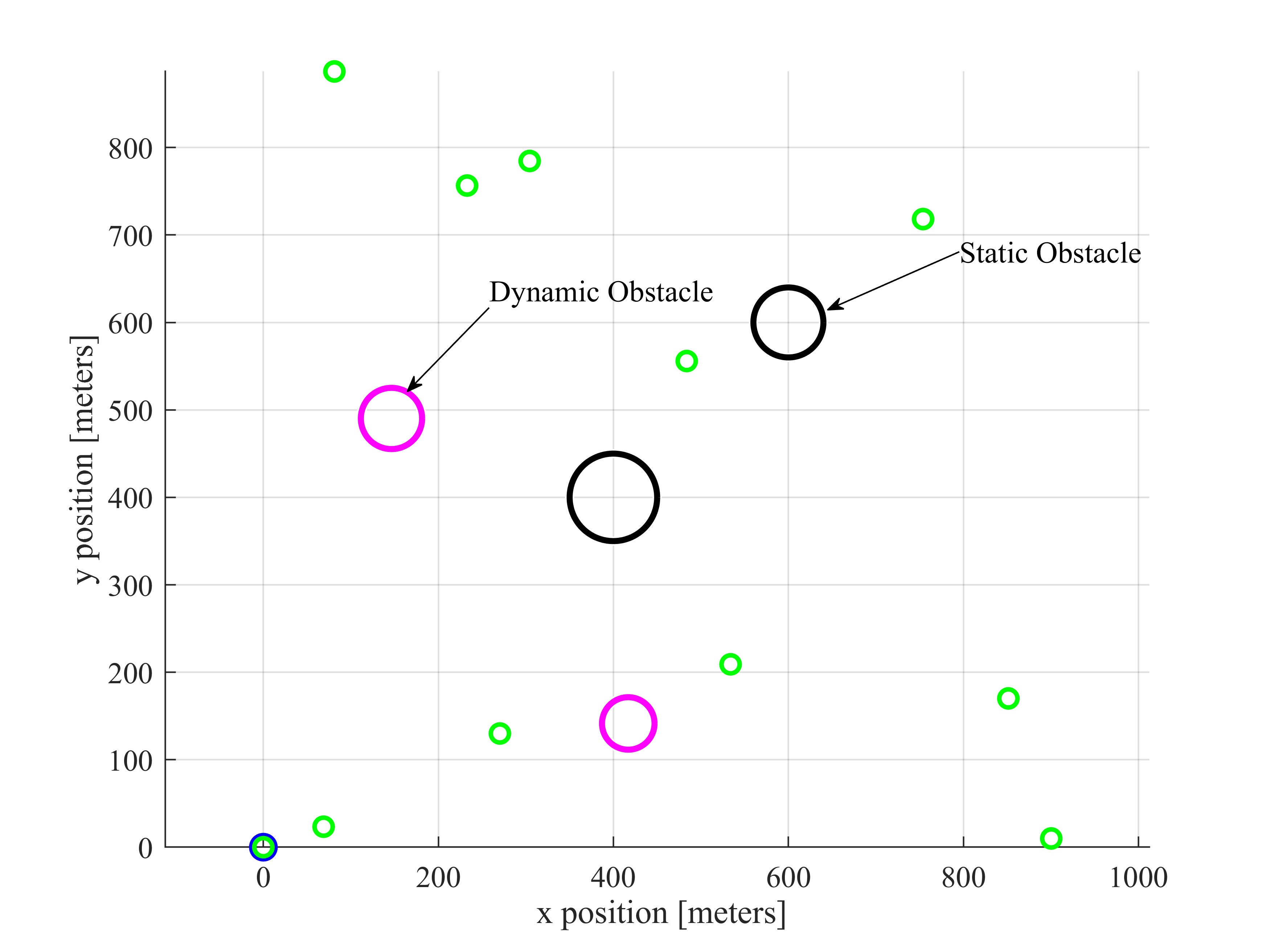
问题定义:论文旨在解决无人机集群在复杂动态环境中自主轨迹设计的问题。现有方法,如Q学习,在面对环境变化时收敛速度慢,稳定性不足,且难以保证安全性。此外,如何实现无人机集群的分布式决策和自适应任务分配也是一个挑战。
核心思路:论文的核心思路是利用主动推理(Active Inference)框架,结合世界模型(World Model),使无人机能够通过最小化预测误差来推断最优动作。世界模型通过学习专家轨迹,捕捉无人机集群在不同任务、航路和运动层面的行为模式。主动推理则允许无人机根据当前状态和世界模型的预测,选择能够最小化预测误差的动作,从而实现自适应的轨迹规划。
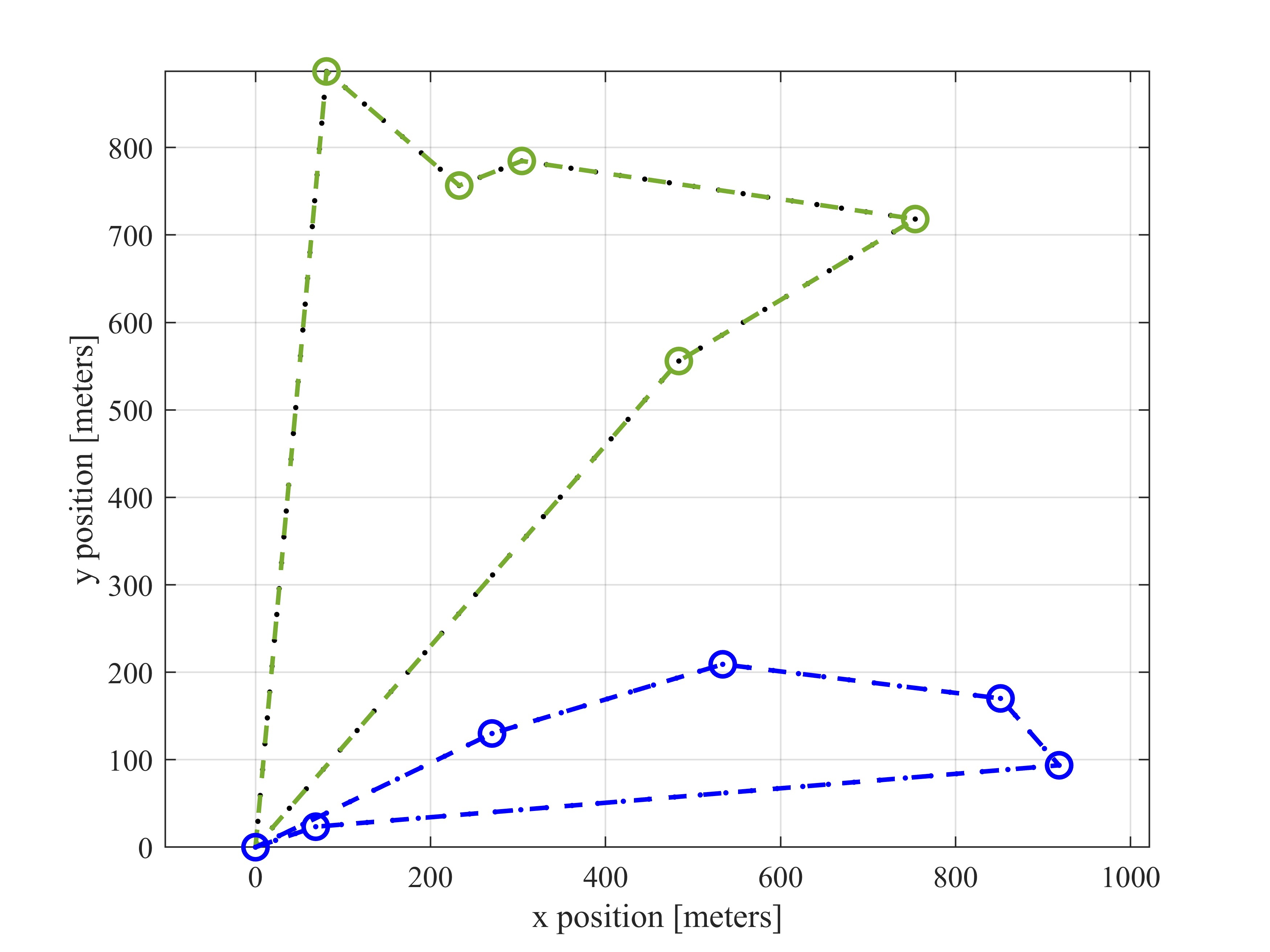
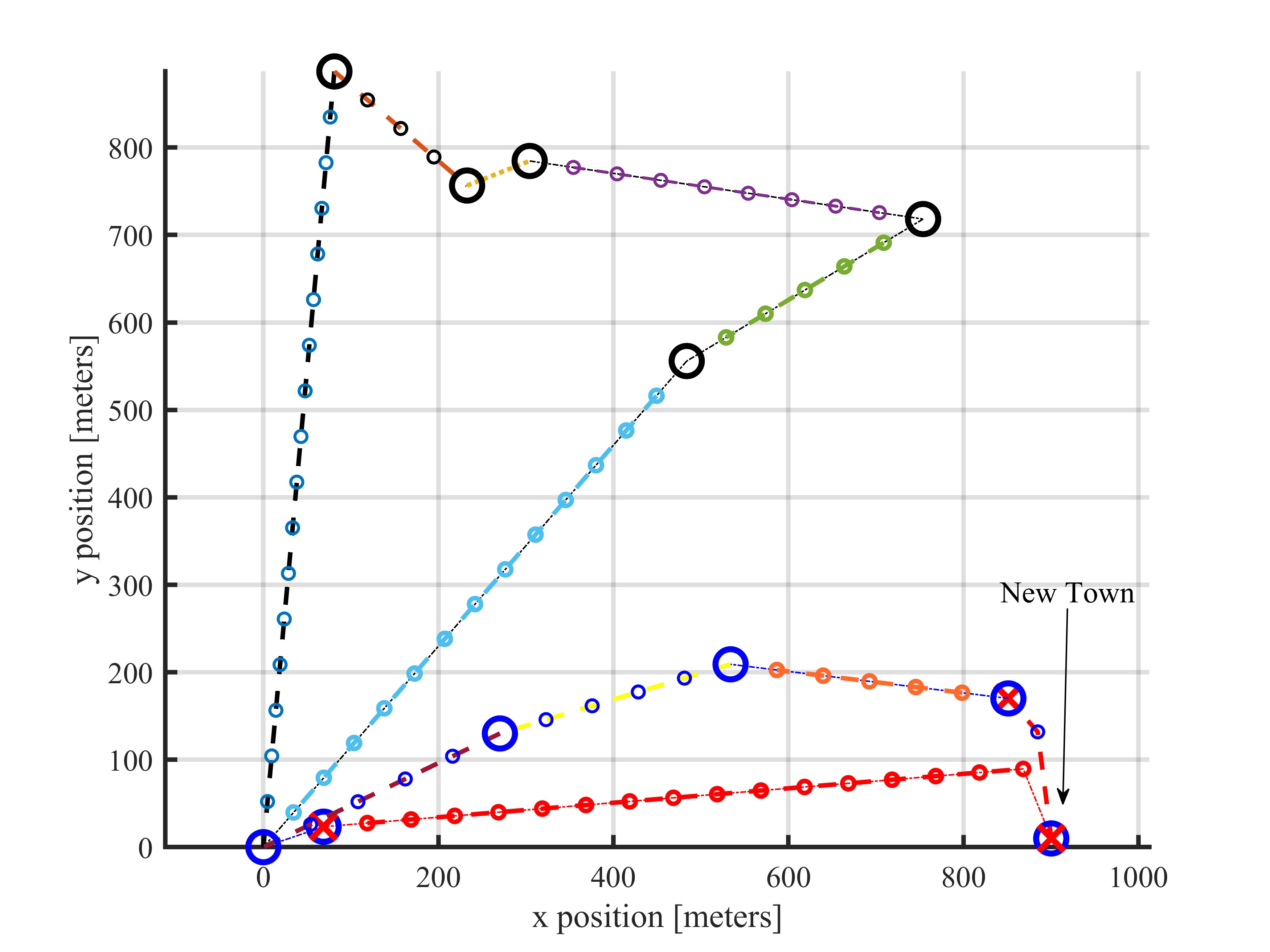
技术框架:该框架包含离线训练和在线运行两个阶段。离线训练阶段,利用遗传算法与斥力(GA-RF)生成专家轨迹,并用这些轨迹训练一个分层世界模型。该模型包含任务层、航路层和运动层,分别对应任务分配、航路排序和运动规划。在线运行阶段,无人机首先根据当前状态和世界模型进行状态预测,然后通过主动推理选择能够最小化预测误差的动作,最后执行该动作并更新自身状态。
关键创新:该方法最重要的创新点在于将主动推理与世界模型相结合,用于无人机集群的轨迹规划。与传统的强化学习方法相比,主动推理能够更有效地利用先验知识,加速学习过程,并提高对环境变化的适应能力。此外,分层世界模型的设计能够有效地捕捉无人机集群在不同层面的行为模式,从而实现更精细的轨迹规划。
关键设计:世界模型采用分层结构,每一层都包含一个概率模型,用于预测下一时刻的状态。主动推理通过最小化自由能(Free Energy)来选择动作,自由能是预测误差和动作代价的加权和。遗传算法与斥力(GA-RF)用于生成高质量的专家轨迹,为世界模型的训练提供数据支持。具体的参数设置和网络结构在论文中未详细说明,属于未知信息。
🖼️ 关键图片
📊 实验亮点
仿真结果表明,与Q学习相比,该方法在收敛速度上提升显著,能够更快地找到最优轨迹。同时,该方法在动态环境中表现出更高的稳定性,能够有效地避免碰撞和死锁。此外,该方法还能够实现更安全的导航,降低无人机发生故障的风险。具体的性能提升数据在论文中未明确给出,属于未知信息。
🎯 应用场景
该研究成果可应用于多种无人机集群应用场景,如搜索救援、环境监测、农业植保、物流配送等。通过自主适应环境变化和优化任务分配,该方法能够提高无人机集群的工作效率和安全性,降低人工干预的需求,具有重要的实际应用价值和广阔的发展前景。
📄 摘要(原文)
This paper proposes an Active Inference-based framework for autonomous trajectory design in UAV swarms. The method integrates probabilistic reasoning and self-learning to enable distributed mission allocation, route ordering, and motion planning. Expert trajectories generated using a Genetic Algorithm with Repulsion Forces (GA-RF) are employed to train a hierarchical World Model capturing swarm behavior across mission, route, and motion levels. During online operation, UAVs infer actions by minimizing divergence between current beliefs and model-predicted states, enabling adaptive responses to dynamic environments. Simulation results show faster convergence, higher stability, and safer navigation than Q-Learning, demonstrating the scalability and cognitive grounding of the proposed framework for intelligent UAV swarm control.