Contact-Aware Neural Dynamics
作者: Changwei Jing, Jai Krishna Bandi, Jianglong Ye, Yan Duan, Pieter Abbeel, Xiaolong Wang, Sha Yi
分类: cs.RO
发布日期: 2026-01-19
备注: 8 pages
💡 一句话要点
提出Contact-Aware Neural Dynamics,解决接触交互中Sim-to-Real迁移难题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱四:生成式动作 (Generative Motion)
关键词: Sim-to-Real 神经动力学 接触感知 机器人学习 物理仿真
📋 核心要点
- 现有Sim-to-Real方法难以处理接触交互中复杂且非连续的动力学,导致仿真与现实存在较大差距。
- 提出Contact-Aware Neural Dynamics,利用触觉信息学习神经动力学模型,弥合仿真与现实的差异。
- 实验表明,该方法提高了状态预测精度,并能有效提升纯仿真训练策略在真实环境中的性能。
📝 摘要(中文)
高保真物理仿真对于可扩展的机器人学习至关重要,但Sim-to-Real的差距依然存在,尤其是在涉及复杂、动态和非连续交互(如物理接触)的任务中。显式系统辨识(调整显式仿真器参数)通常不足以对齐真实世界复杂、高维和状态相关的动力学。为了克服这一点,我们提出了一个隐式的Sim-to-Real对齐框架,该框架学习直接对齐仿真器的动力学与接触信息。我们的方法将现成的仿真器视为一个基础先验,并学习一个接触感知神经动力学模型,以使用真实世界的观察来细化模拟状态。我们表明,使用来自机器人手的触觉接触信息可以有效地建模接触丰富任务中固有的非平滑不连续性,从而产生一个基于真实世界数据的神经动力学模型。我们证明了这种学习到的前向动力学模型提高了状态预测的准确性,并且可以有效地用于预测策略性能和改进纯粹在标准仿真器中训练的策略,从而为Sim-to-Real对齐提供了一种可扩展的、数据驱动的方法。
🔬 方法详解
问题定义:论文旨在解决机器人学习中,由于物理仿真与真实环境存在差异(Sim-to-Real gap),导致在仿真环境中训练的策略难以直接应用于真实世界的问题。尤其是在涉及复杂接触交互的任务中,传统方法难以准确建模非连续的动力学变化,导致仿真结果与真实情况偏差较大。现有方法,如显式系统辨识,难以捕捉真实世界高维、状态相关的动力学特性。
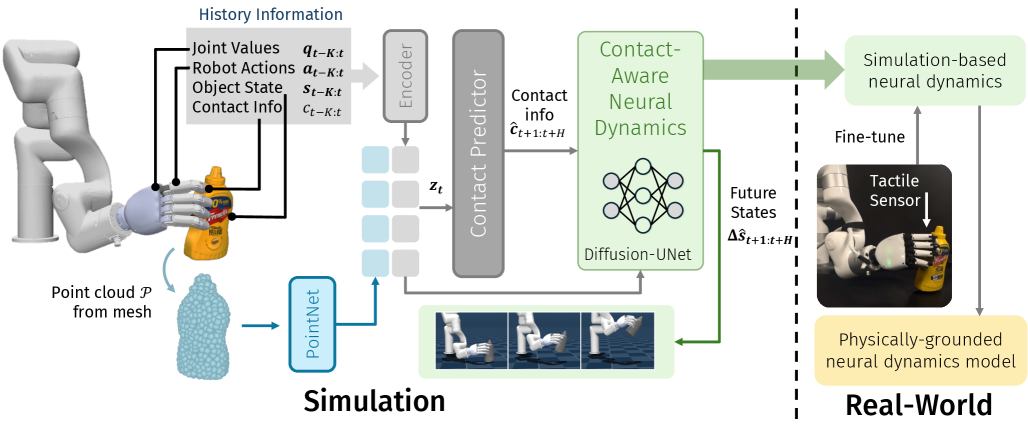
核心思路:论文的核心思路是将现有的物理仿真器作为基础先验,然后通过学习一个接触感知的神经动力学模型来修正仿真结果。该模型利用真实世界的观测数据,特别是来自机器人手的触觉信息,来学习接触交互过程中非平滑的动力学变化。通过这种方式,模型能够更好地理解和预测真实世界的物理行为,从而缩小Sim-to-Real的差距。
技术框架:整体框架包含以下几个主要部分:1)使用现成的物理仿真器生成初始状态和动力学预测;2)利用机器人手的触觉传感器获取接触信息;3)将仿真状态和触觉信息输入到接触感知神经动力学模型中;4)神经动力学模型学习修正仿真状态,使其更接近真实世界的观测结果。该框架通过迭代学习和优化,不断提高模型的状态预测精度。
关键创新:该论文的关键创新在于利用触觉信息来建模接触交互过程中的非连续动力学变化。传统的Sim-to-Real方法通常忽略或简化了接触交互的复杂性,而该方法通过引入触觉信息,能够更准确地捕捉接触发生时的状态突变和力学响应。此外,该方法采用隐式的方式进行Sim-to-Real对齐,避免了显式地调整仿真器参数,从而提高了模型的泛化能力和适应性。
关键设计:论文中,神经动力学模型可能采用循环神经网络(RNN)或Transformer等结构,以捕捉时间序列上的动力学变化。损失函数的设计可能包括状态预测误差、接触力误差等,以确保模型能够准确预测状态和接触力。触觉信息的表示方式可能采用力/扭矩传感器数据、触觉图像等。具体的网络结构、参数设置和损失函数需要根据具体的任务和数据集进行调整。
🖼️ 关键图片
📊 实验亮点
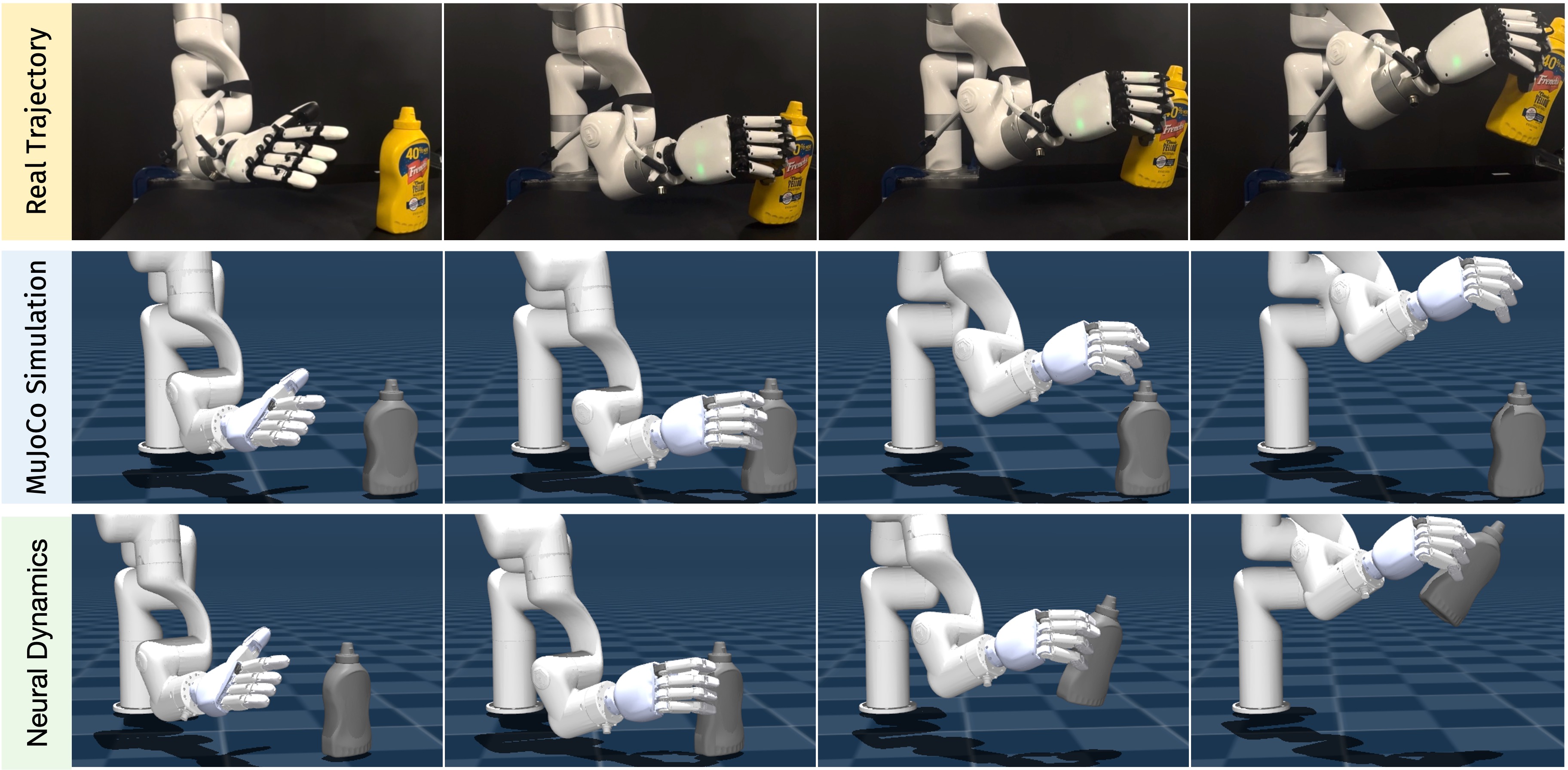
论文实验结果表明,所提出的Contact-Aware Neural Dynamics模型能够显著提高状态预测的准确性,尤其是在接触交互过程中。通过与传统仿真方法和不考虑接触信息的神经动力学模型进行对比,该方法在状态预测误差、策略性能预测等方面均取得了显著提升。此外,该方法还能够有效地改进纯仿真训练的策略,使其在真实环境中表现更好。
🎯 应用场景
该研究成果可广泛应用于机器人操作、自动驾驶、虚拟现实等领域。例如,在机器人操作中,可以利用该方法训练机器人在复杂环境中进行抓取、装配等任务,提高机器人的自主性和适应性。在自动驾驶中,可以用于模拟车辆与行人、障碍物之间的碰撞,提高自动驾驶系统的安全性。在虚拟现实中,可以增强虚拟环境的交互真实感,提升用户体验。
📄 摘要(原文)
High-fidelity physics simulation is essential for scalable robotic learning, but the sim-to-real gap persists, especially for tasks involving complex, dynamic, and discontinuous interactions like physical contacts. Explicit system identification, which tunes explicit simulator parameters, is often insufficient to align the intricate, high-dimensional, and state-dependent dynamics of the real world. To overcome this, we propose an implicit sim-to-real alignment framework that learns to directly align the simulator's dynamics with contact information. Our method treats the off-the-shelf simulator as a base prior and learns a contact-aware neural dynamics model to refine simulated states using real-world observations. We show that using tactile contact information from robotic hands can effectively model the non-smooth discontinuities inherent in contact-rich tasks, resulting in a neural dynamics model grounded by real-world data. We demonstrate that this learned forward dynamics model improves state prediction accuracy and can be effectively used to predict policy performance and refine policies trained purely in standard simulators, offering a scalable, data-driven approach to sim-to-real alignment.