The Mini Wheelbot Dataset: High-Fidelity Data for Robot Learning
作者: Henrik Hose, Paul Brunzema, Devdutt Subhasish, Sebastian Trimpe
分类: cs.RO, eess.SY
发布日期: 2026-01-16
💡 一句话要点
发布Mini Wheelbot数据集,助力机器人学习中不平衡系统的鲁棒控制算法开发
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 机器人学习 数据集 不平衡系统 动力学建模 状态估计 控制算法 Mini Wheelbot
📋 核心要点
- 不平衡系统的鲁棒学习控制算法开发需要高质量的真实世界数据,但获取专用机器人硬件对许多研究人员来说仍然是一个重大障碍。
- 论文核心在于构建并发布了Mini Wheelbot数据集,该数据集包含丰富的传感器数据、状态估计、地面实况姿态和视频记录,为相关研究提供便利。
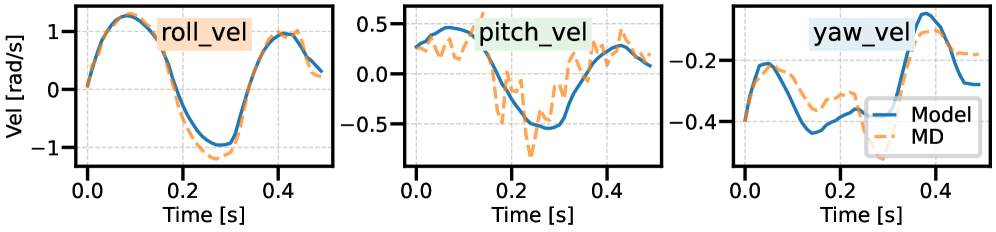
- 论文通过动力学模型学习、状态估计和时间序列分类等示例应用,展示了该数据集在机器人算法基准测试中的价值。
📝 摘要(中文)
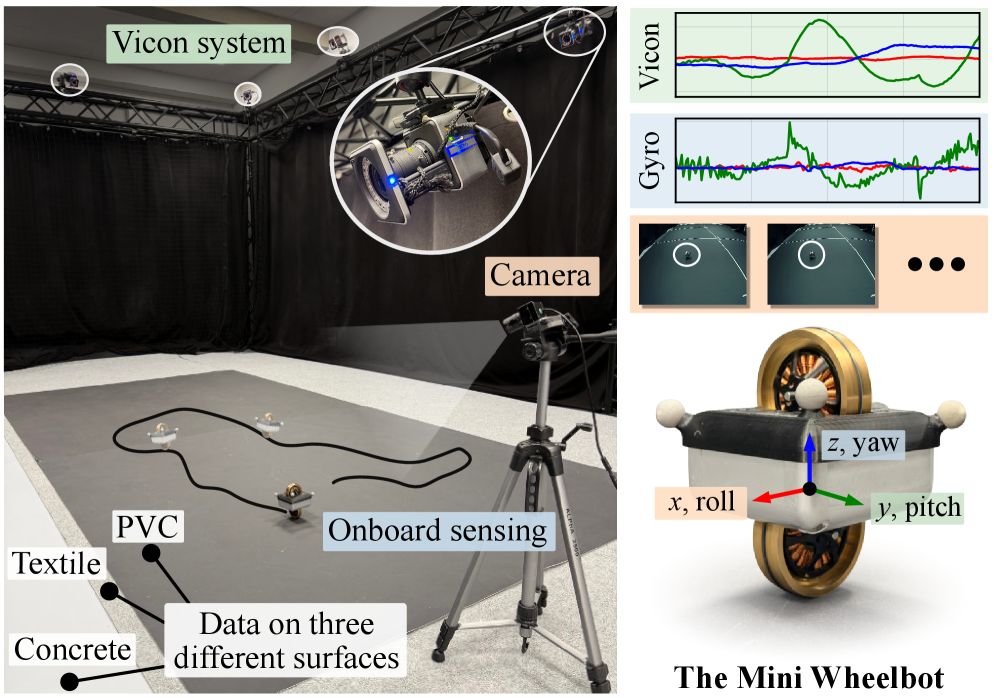
本文介绍了一个针对Mini Wheelbot的综合动力学数据集。Mini Wheelbot是一个开源的、准对称的平衡反作用轮单轮机器人。该数据集提供1kHz的同步数据,包括所有板载传感器读数、状态估计、来自运动捕捉系统的地面实况姿态以及第三人称视角的视频记录。为了确保数据的多样性,我们包含了跨多个硬件实例和表面,使用各种控制范式的实验,包括伪随机二进制激励、非线性模型预测控制和强化学习智能体。我们提供了动力学模型学习、状态估计和时间序列分类中的几个示例应用,以说明可以在我们的数据集上进行基准测试的常见机器人算法。
🔬 方法详解
问题定义:现有研究中,开发用于不平衡系统的鲁棒的、基于学习的控制算法面临数据获取的挑战。获取高质量的真实世界数据,特别是来自专用机器人硬件的数据,对许多研究人员来说是一个显著的障碍。缺乏标准化的、高质量的数据集阻碍了算法的开发、测试和比较。
核心思路:论文的核心思路是创建一个公开可用的、高质量的机器人动力学数据集,以促进基于学习的控制算法的开发和评估。通过提供全面的传感器数据、状态估计和地面实况姿态,该数据集旨在消除数据获取的障碍,并促进机器人学习领域的研究。
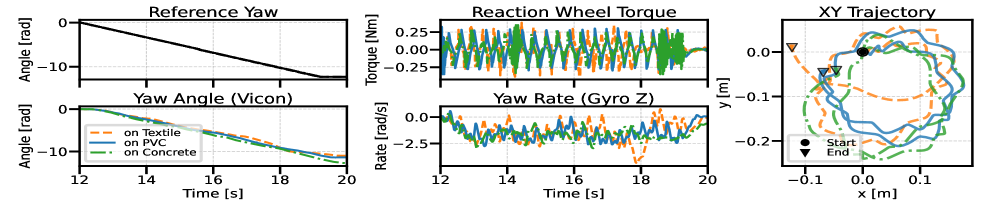
技术框架:该数据集基于Mini Wheelbot平台,包含以下主要组成部分:1) 1 kHz同步的板载传感器数据(如IMU、编码器等);2) 基于传感器数据的状态估计;3) 来自运动捕捉系统的地面实况姿态;4) 第三人称视角的视频记录。数据集涵盖了多种实验条件,包括不同的硬件实例、表面类型和控制范式(伪随机二进制激励、非线性模型预测控制、强化学习)。
关键创新:该数据集的关键创新在于其全面性、高质量和多样性。它不仅提供了丰富的传感器数据和地面实况姿态,还涵盖了多种实验条件和控制策略,从而能够对各种机器人学习算法进行基准测试和比较。此外,数据集的开源性质也促进了研究的开放性和可重复性。
关键设计:数据集的关键设计包括:1) 采用高采样率(1 kHz)以捕捉快速动态;2) 使用运动捕捉系统提供精确的地面实况姿态;3) 包含多种控制策略以增加数据的多样性;4) 提供详细的文档和示例代码,方便用户使用数据集。
🖼️ 关键图片
📊 实验亮点
论文通过动力学模型学习、状态估计和时间序列分类等示例应用,展示了Mini Wheelbot数据集的有效性。例如,研究人员可以使用该数据集训练精确的动力学模型,从而改进控制算法的性能。此外,该数据集还可以用于评估不同的状态估计算法,并比较其精度和鲁棒性。这些实验结果表明,该数据集为机器人学习研究提供了一个有价值的资源。
🎯 应用场景
该数据集可广泛应用于机器人学习领域,例如动力学模型学习、状态估计、控制算法开发和验证。它尤其适用于研究不平衡系统的控制,如双足机器人、轮式倒立摆等。该数据集的发布将促进相关算法的开发和性能提升,加速机器人技术的进步。
📄 摘要(原文)
The development of robust learning-based control algorithms for unstable systems requires high-quality, real-world data, yet access to specialized robotic hardware remains a significant barrier for many researchers. This paper introduces a comprehensive dynamics dataset for the Mini Wheelbot, an open-source, quasi-symmetric balancing reaction wheel unicycle. The dataset provides 1 kHz synchronized data encompassing all onboard sensor readings, state estimates, ground-truth poses from a motion capture system, and third-person video logs. To ensure data diversity, we include experiments across multiple hardware instances and surfaces using various control paradigms, including pseudo-random binary excitation, nonlinear model predictive control, and reinforcement learning agents. We include several example applications in dynamics model learning, state estimation, and time-series classification to illustrate common robotics algorithms that can be benchmarked on our dataset.