Learning Quadrupedal Locomotion for a Heavy Hydraulic Robot Using an Actuator Model
作者: Minho Lee, Hyeonseok Kim, Jin Tak Kim, Sangshin Park, Jeong Hyun Lee, Jungsan Cho, Jemin Hwangbo
分类: cs.RO, cs.AI
发布日期: 2026-01-16
备注: 9 pages, Accepted to IEEE Robotics and Automation Letters (RA-L) 2025
期刊: IEEE Robotics and Automation Letters (Volume: 10, Issue: 12, December 2025)
💡 一句话要点
提出基于液压动力学的执行器模型,实现重型液压四足机器人强化学习控制的迁移。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 液压机器人 强化学习 仿真到现实 执行器模型 四足机器人
📋 核心要点
- 大型液压机器人由于控制响应慢和复杂的流体动力学,其仿真到现实迁移面临挑战,难以直接应用强化学习。
- 论文提出一种基于液压动力学的解析执行器模型,能快速预测关节扭矩,适用于强化学习环境。
- 实验表明,该模型在数据有限的情况下优于神经网络模型,并成功部署在300公斤的液压四足机器人上。
📝 摘要(中文)
大型液压机器人的仿真到现实(sim-to-real)迁移是机器人领域的一项重大挑战,因为其固有的控制响应缓慢和复杂的流体动力学特性。这种复杂动力学源于多个相互连接的液压缸结构以及液压缸流体速率的差异。这些特性使得对所有关节进行详细仿真变得复杂,不适合强化学习(RL)应用。本文提出了一种由液压动力学驱动的分析执行器模型来表示复杂的执行器。该模型在不到1微秒的时间内预测所有12个执行器的关节扭矩,从而允许在RL环境中进行快速处理。我们将我们的模型与基于神经网络的执行器模型进行了比较,并证明了我们的模型在数据有限情况下的优势。使用我们的模型在RL中训练的运动策略被部署在超过300公斤的液压四足机器人上。这项工作首次成功地展示了在重型液压四足机器人上使用RL进行稳定和鲁棒的命令跟踪运动的迁移,展示了先进的sim-to-real可迁移性。
🔬 方法详解
问题定义:现有方法难以对大型液压机器人的复杂动力学进行精确建模,特别是液压缸之间的相互作用和流体速率差异,导致仿真结果与实际情况存在较大差距。这使得基于仿真的强化学习策略难以直接迁移到真实机器人上,尤其是在重型液压机器人上,控制的微小误差都可能导致系统不稳定。现有方法要么简化模型,要么依赖大量数据进行学习,难以兼顾精度和效率。
核心思路:论文的核心思路是利用液压动力学的先验知识,构建一个解析的执行器模型,该模型能够快速且准确地预测液压执行器的关节扭矩。通过将复杂的液压系统简化为可计算的数学模型,避免了对所有细节进行仿真,从而提高了仿真效率,并降低了对大量数据的依赖。
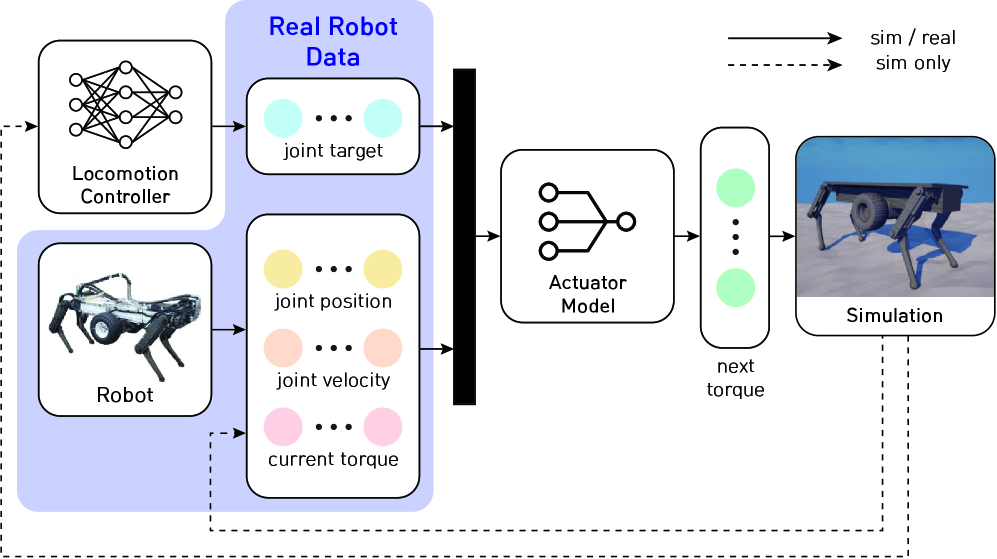
技术框架:整体框架包括三个主要部分:首先,构建基于液压动力学的执行器模型,该模型接收控制指令作为输入,输出关节扭矩预测。其次,使用该模型在强化学习环境中训练运动策略。最后,将训练好的策略部署到真实的液压四足机器人上。该框架的关键在于执行器模型的准确性和计算效率,以及强化学习算法的鲁棒性。
关键创新:最重要的技术创新点在于提出了基于液压动力学的解析执行器模型。与传统的简化模型或基于神经网络的模型相比,该模型能够更准确地捕捉液压系统的动态特性,同时保持了较高的计算效率。这种模型允许在强化学习环境中进行快速迭代,并减少了对大量真实数据的需求。
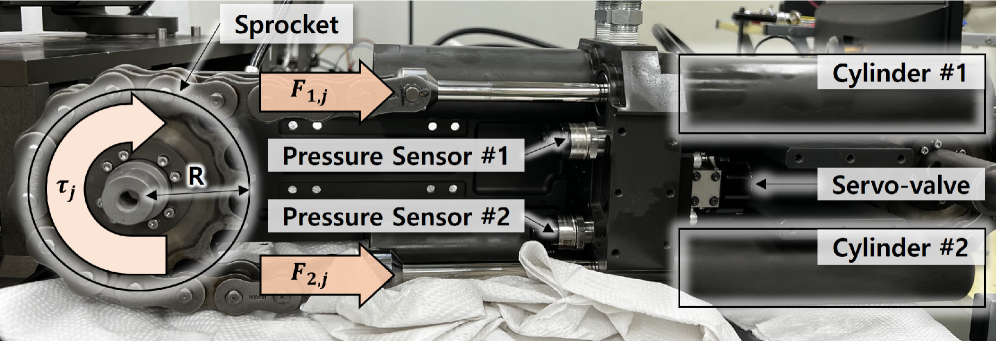
关键设计:执行器模型基于液压缸的物理特性,包括液压缸的几何参数、液压油的性质、以及阀门的控制特性。模型通过求解液压动力学方程,计算出液压缸内的压力和流量,进而预测关节扭矩。强化学习算法采用了一种Actor-Critic方法,其中Actor网络用于生成控制指令,Critic网络用于评估策略的性能。损失函数包括奖励函数和正则化项,用于鼓励机器人保持平衡和跟踪目标轨迹。
🖼️ 关键图片

📊 实验亮点
实验结果表明,基于液压动力学执行器模型训练的强化学习策略,成功地部署在超过300公斤的液压四足机器人上,实现了稳定和鲁棒的命令跟踪运动。与基于神经网络的执行器模型相比,该模型在数据有限的情况下表现出更好的性能。这是首次在重型液压四足机器人上成功实现基于强化学习的sim-to-real迁移,证明了该方法的有效性和优越性。
🎯 应用场景
该研究成果可应用于各种大型液压机器人,例如建筑机器人、农业机器人、搜救机器人等。通过提高仿真到现实的迁移能力,可以显著缩短开发周期,降低开发成本,并提高机器人的性能和鲁棒性。此外,该方法还可以推广到其他类型的复杂机器人系统,例如气动机器人和电力驱动机器人。
📄 摘要(原文)
The simulation-to-reality (sim-to-real) transfer of large-scale hydraulic robots presents a significant challenge in robotics because of the inherent slow control response and complex fluid dynamics. The complex dynamics result from the multiple interconnected cylinder structure and the difference in fluid rates of the cylinders. These characteristics complicate detailed simulation for all joints, making it unsuitable for reinforcement learning (RL) applications. In this work, we propose an analytical actuator model driven by hydraulic dynamics to represent the complicated actuators. The model predicts joint torques for all 12 actuators in under 1 microsecond, allowing rapid processing in RL environments. We compare our model with neural network-based actuator models and demonstrate the advantages of our model in data-limited scenarios. The locomotion policy trained in RL with our model is deployed on a hydraulic quadruped robot, which is over 300 kg. This work is the first demonstration of a successful transfer of stable and robust command-tracking locomotion with RL on a heavy hydraulic quadruped robot, demonstrating advanced sim-to-real transferability.