A3D: Adaptive Affordance Assembly with Dual-Arm Manipulation
作者: Jiaqi Liang, Yue Chen, Qize Yu, Yan Shen, Haipeng Zhang, Hao Dong, Ruihai Wu
分类: cs.RO, cs.AI
发布日期: 2026-01-16
备注: AAAI2026 oral
💡 一句话要点
A3D:基于自适应可供性的双臂协作家具装配框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 双臂协作 家具装配 自适应可供性 点云处理 机器人操作
📋 核心要点
- 现有机器人家具装配方法难以在长时程任务中动态调整支撑策略,且泛化性不足,难以适应不同几何形状的部件。
- A3D框架通过学习自适应可供性,利用点级几何表示建模部件交互,从而识别最佳支撑位置并实现跨几何形状的泛化。
- 实验结果表明,A3D框架在包含多种家具和部件的仿真及真实环境中均表现出良好的泛化能力和装配性能。
📝 摘要(中文)
家具装配是机器人领域一项重要但具有挑战性的任务,它需要精确的双臂协调,其中一个手臂操作部件,另一个手臂提供协作支撑和稳定。为了更有效地完成这项任务,机器人需要在长时间的装配过程中主动调整支撑策略,同时泛化到不同的部件几何形状。我们提出了A3D,一个学习自适应可供性以识别家具部件上最佳支撑和稳定位置的框架。该方法采用密集的点级几何表示来建模部件交互模式,从而能够泛化到不同的几何形状。为了处理不断变化的装配状态,我们引入了一个自适应模块,该模块使用交互反馈来动态调整装配过程中的支撑策略。我们建立了一个仿真环境,其中包含8种家具类型的50个不同部件,专为双臂协作评估而设计。实验表明,我们的框架在仿真和真实环境中都能有效地泛化到不同的部件几何形状和家具类别。
🔬 方法详解
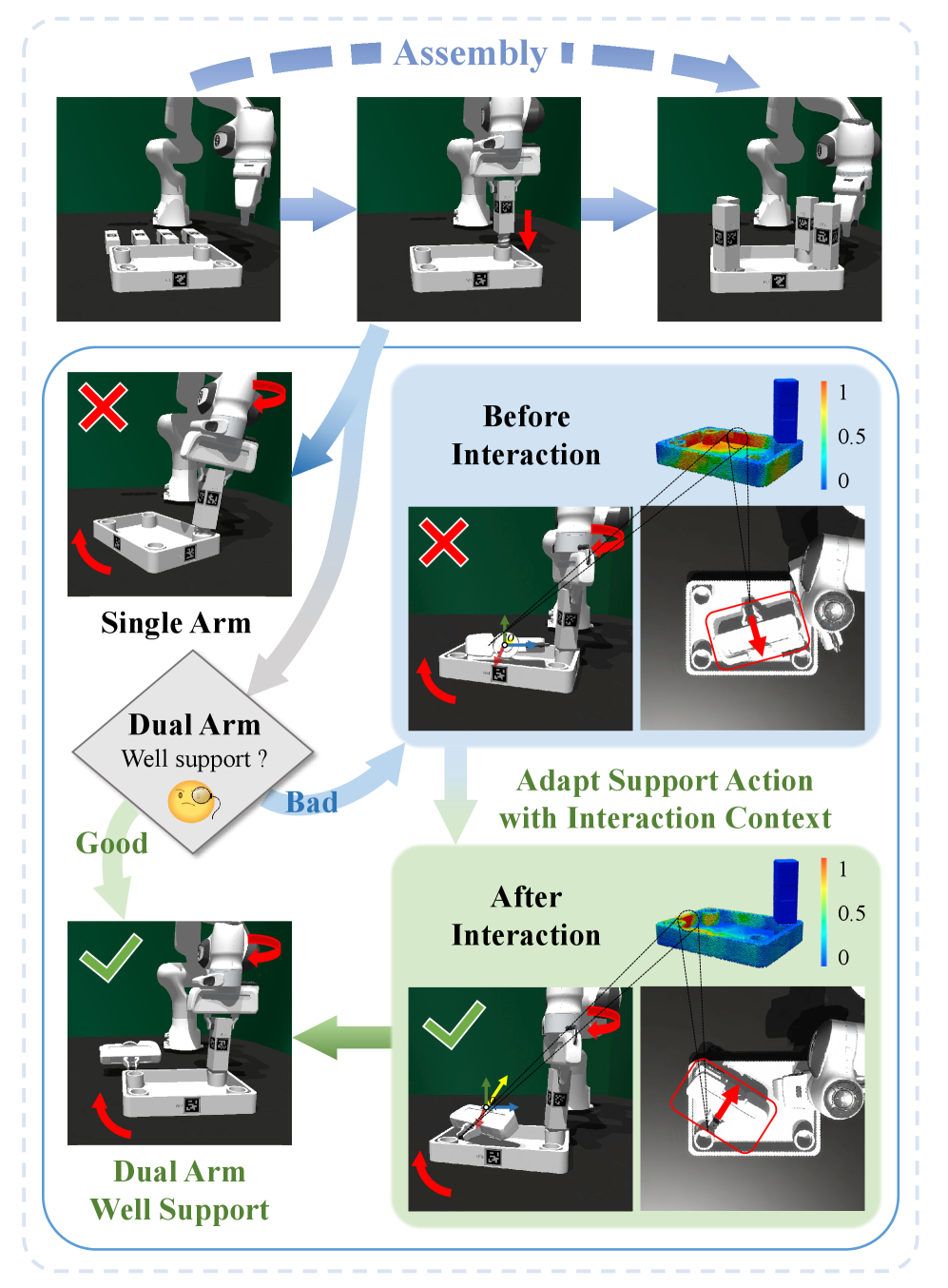
问题定义:机器人家具装配任务需要双臂协调,一个手臂操作部件,另一个提供支撑。现有方法难以在装配过程中根据交互反馈动态调整支撑策略,并且难以泛化到不同几何形状的部件,导致装配效率和成功率受限。
核心思路:A3D的核心在于学习自适应的可供性,即预测部件上哪些位置适合提供支撑。通过建模部件之间的交互模式,并利用交互反馈动态调整支撑策略,从而实现更稳定、高效的装配过程。这种方法旨在使机器人能够像人类一样,根据实际情况灵活调整支撑位置。
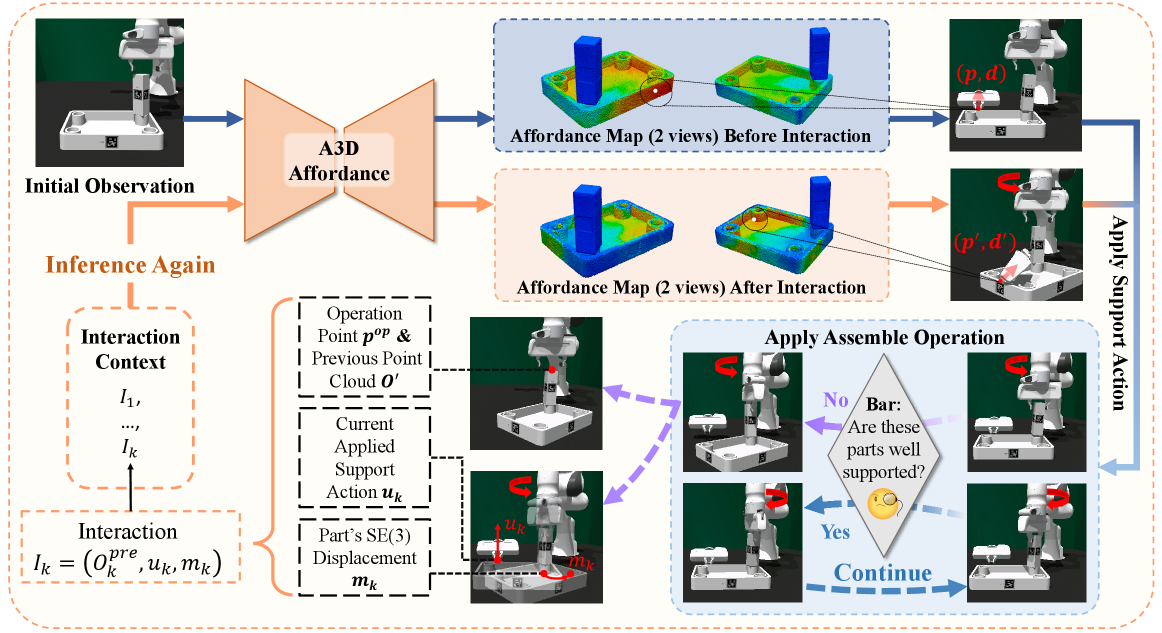
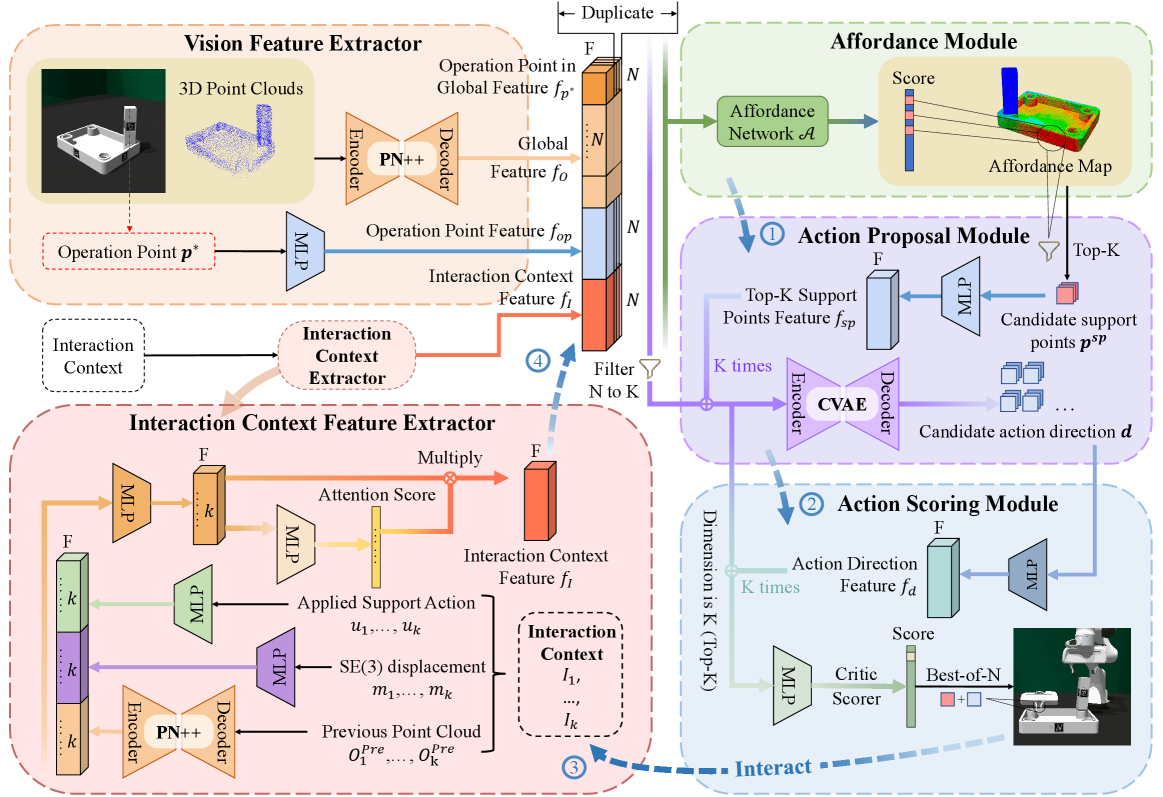
技术框架:A3D框架包含以下主要模块:1) 密集点云几何表示模块,用于提取部件的点云特征;2) 可供性预测模块,基于点云特征预测部件上的支撑位置;3) 自适应模块,根据装配过程中的交互反馈(例如力/力矩传感器数据)动态调整支撑策略。整个流程是,首先利用点云特征预测初始支撑位置,然后在装配过程中,根据交互反馈不断优化支撑位置。
关键创新:A3D的关键创新在于自适应可供性的学习和应用。与传统的固定支撑策略不同,A3D能够根据装配过程中的实际情况动态调整支撑位置,从而提高装配的稳定性和成功率。此外,使用点云几何表示使得模型能够泛化到不同几何形状的部件。
关键设计:A3D使用PointNet++提取点云特征。可供性预测模块采用多层感知机(MLP)进行预测。自适应模块使用强化学习或贝叶斯优化等方法,根据交互反馈调整支撑位置。损失函数包括可供性预测损失和装配成功率损失。具体参数设置和网络结构细节在论文中有详细描述(未知)。
🖼️ 关键图片
📊 实验亮点
实验结果表明,A3D框架在仿真和真实环境中均表现出良好的泛化能力。在包含50个不同部件的仿真环境中,A3D的装配成功率显著高于基线方法。在真实机器人实验中,A3D也成功完成了多种家具的装配任务,验证了其在实际应用中的可行性。具体的性能数据和提升幅度在论文中有详细描述(未知)。
🎯 应用场景
A3D框架可应用于自动化家具装配、建筑构件组装等领域,尤其适用于需要双臂协作和动态调整支撑策略的复杂装配任务。该研究有助于提高装配效率、降低人工成本,并提升机器人应对复杂环境的适应性。未来,该技术有望扩展到其他需要精细操作和稳定支撑的机器人应用场景。
📄 摘要(原文)
Furniture assembly is a crucial yet challenging task for robots, requiring precise dual-arm coordination where one arm manipulates parts while the other provides collaborative support and stabilization. To accomplish this task more effectively, robots need to actively adapt support strategies throughout the long-horizon assembly process, while also generalizing across diverse part geometries. We propose A3D, a framework which learns adaptive affordances to identify optimal support and stabilization locations on furniture parts. The method employs dense point-level geometric representations to model part interaction patterns, enabling generalization across varied geometries. To handle evolving assembly states, we introduce an adaptive module that uses interaction feedback to dynamically adjust support strategies during assembly based on previous interactions. We establish a simulation environment featuring 50 diverse parts across 8 furniture types, designed for dual-arm collaboration evaluation. Experiments demonstrate that our framework generalizes effectively to diverse part geometries and furniture categories in both simulation and real-world settings.