CHORAL: Traversal-Aware Planning for Safe and Efficient Heterogeneous Multi-Robot Routing
作者: David Morilla-Cabello, Eduardo Montijano
分类: cs.RO
发布日期: 2026-01-15
💡 一句话要点
CHORAL:面向安全高效异构多机器人路径规划的遍历感知方法
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 异构多机器人 路径规划 语义地图 能力感知 车辆路径问题
📋 核心要点
- 现有方法在异构多机器人路径规划中,未能充分利用语义场景理解和机器人自身能力。
- CHORAL框架通过侦察构建语义地图,并结合机器人能力进行任务分配和路径规划。
- 实验表明,CHORAL能为异构机器人规划更安全高效的路径,并已开源。
📝 摘要(中文)
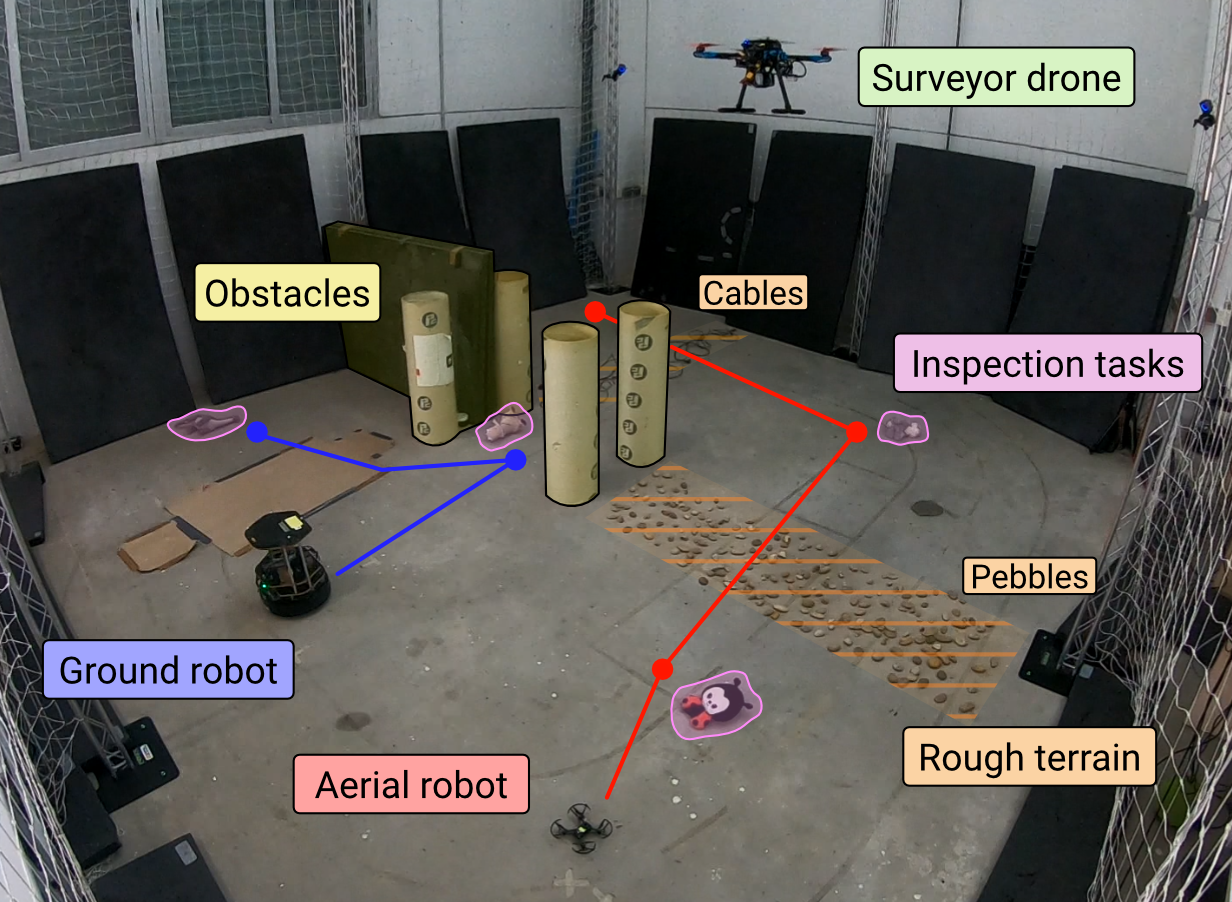
在大型、未知和复杂环境中利用自主机器人进行监测面临着巨大的导航挑战。部署具有互补能力的异构机器人团队可以显著提高任务性能和可行性。然而,有效建模不同机器人平台与环境的交互需要丰富的语义场景理解。现有方法通常假设同构机器人团队,或者侧重于离散的任务兼容性而非连续的路径规划。因此,场景理解没有完全融入到路径规划决策中,限制了它们适应环境和利用每个机器人优势的能力。本文提出了一个集成的语义感知框架,用于协调异构机器人。从侦察飞行开始,我们使用开放词汇视觉模型构建度量-语义地图,并用它来识别需要更仔细检查的区域,以及每种平台到达这些区域的具有能力感知的路径。然后,将这些信息整合到异构车辆路径规划公式中,该公式联合分配检查任务并计算机器人轨迹。在模拟和真实检查任务中使用三个机器人平台的实验表明,我们的方法通过显式考虑每个平台的导航能力,在规划更安全和更高效的路线方面是有效的。我们将我们的框架CHORAL开源,以支持不同机器人团队的可重复性和部署。
🔬 方法详解
问题定义:现有的多机器人路径规划方法,特别是针对异构机器人团队,通常未能充分利用环境的语义信息以及不同机器人平台的能力差异。它们或者假设机器人是同构的,或者只关注离散的任务兼容性,而忽略了连续路径规划中机器人与环境的交互,导致次优的路径规划结果,甚至可能出现安全问题。
核心思路:CHORAL的核心思路是将语义场景理解与异构机器人的能力感知相结合,从而实现更安全、更高效的路径规划。通过首先进行侦察飞行,构建包含语义信息的地图,然后根据不同机器人的能力,为它们分配合适的任务和路径。这种方法能够充分利用每个机器人的优势,并避免让它们进入不适合自身能力的环境。
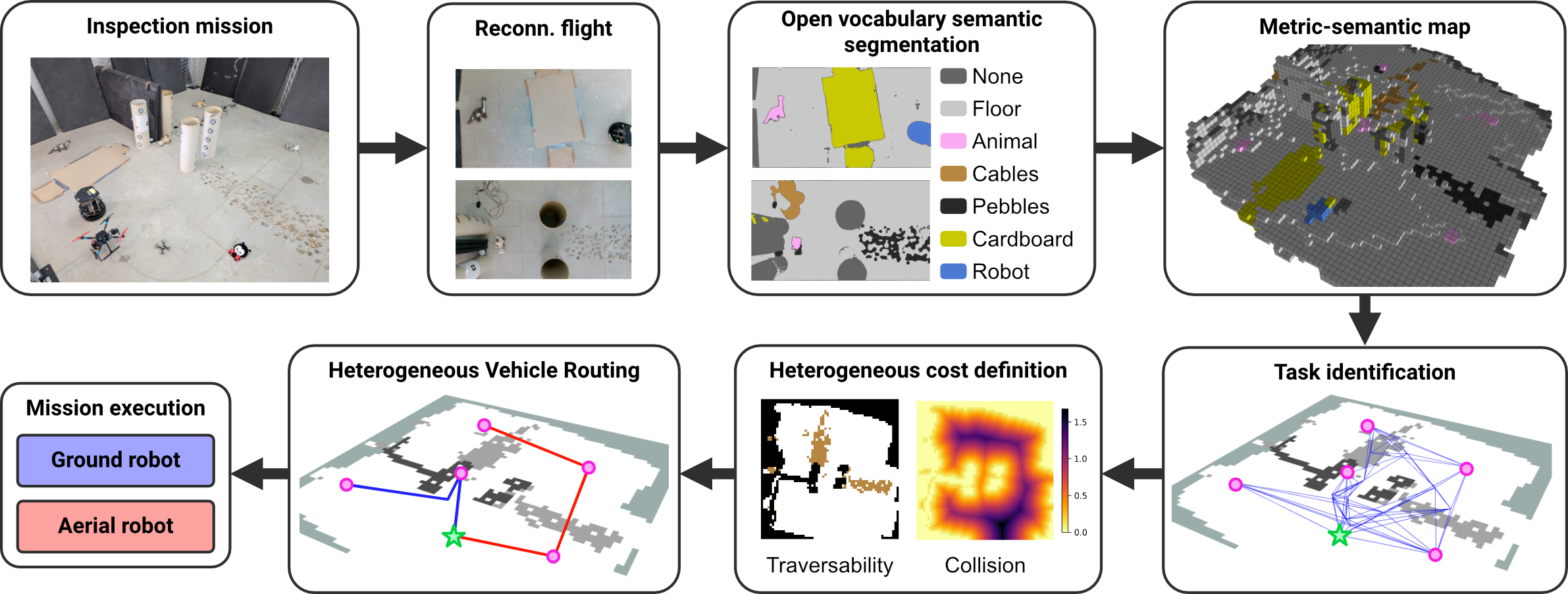
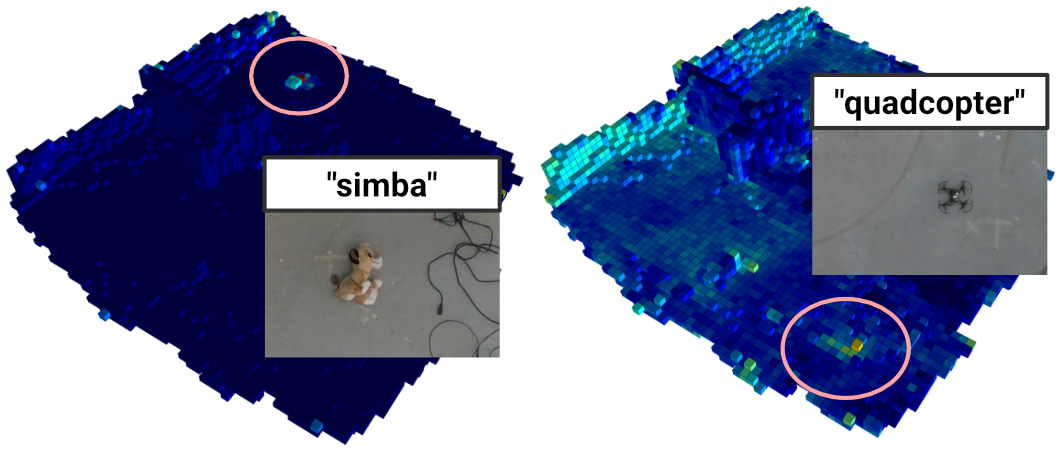
技术框架:CHORAL框架主要包含以下几个阶段:1) 侦察与地图构建:使用无人机进行侦察飞行,利用开放词汇视觉模型构建度量-语义地图。2) 区域识别与任务分配:基于语义地图识别需要进一步检查的区域,并根据机器人能力将任务分配给合适的平台。3) 路径规划:为每个机器人规划具有能力感知的路径,确保它们能够安全高效地到达目标区域。4) 异构车辆路径规划:将任务分配和路径规划整合到一个统一的优化框架中,联合优化所有机器人的轨迹。
关键创新:CHORAL的关键创新在于其集成的语义感知框架,该框架能够将环境的语义信息和异构机器人的能力信息有效地结合起来,从而实现更智能的路径规划。与现有方法相比,CHORAL能够更好地适应环境的变化,并充分利用每个机器人的优势。
关键设计:CHORAL使用开放词汇视觉模型进行语义地图构建,这使得它能够识别各种类型的环境特征,而无需预先定义特定的类别。在路径规划方面,CHORAL考虑了每个机器人的运动学约束和环境的几何约束,以确保规划的路径是可行和安全的。此外,CHORAL还使用了一种异构车辆路径规划公式,该公式能够联合优化任务分配和路径规划,从而实现全局最优的解决方案。
🖼️ 关键图片
📊 实验亮点
实验结果表明,CHORAL能够为异构机器人规划更安全、更高效的路径。在模拟和真实环境中的实验中,CHORAL都能够显著减少机器人的碰撞次数和任务完成时间。例如,在真实检查任务中,CHORAL能够将任务完成时间缩短15%,同时显著降低了机器人的安全风险。
🎯 应用场景
CHORAL框架可应用于各种需要异构多机器人协同作业的场景,例如:灾后救援、环境监测、基础设施巡检、农业生产等。通过利用不同机器人的优势,CHORAL能够提高任务的效率和安全性,并降低人工干预的需求。未来,CHORAL有望成为异构多机器人系统中的关键技术,推动相关领域的发展。
📄 摘要(原文)
Monitoring large, unknown, and complex environments with autonomous robots poses significant navigation challenges, where deploying teams of heterogeneous robots with complementary capabilities can substantially improve both mission performance and feasibility. However, effectively modeling how different robotic platforms interact with the environment requires rich, semantic scene understanding. Despite this, existing approaches often assume homogeneous robot teams or focus on discrete task compatibility rather than continuous routing. Consequently, scene understanding is not fully integrated into routing decisions, limiting their ability to adapt to the environment and to leverage each robot's strengths. In this paper, we propose an integrated semantic-aware framework for coordinating heterogeneous robots. Starting from a reconnaissance flight, we build a metric-semantic map using open-vocabulary vision models and use it to identify regions requiring closer inspection and capability-aware paths for each platform to reach them. These are then incorporated into a heterogeneous vehicle routing formulation that jointly assigns inspection tasks and computes robot trajectories. Experiments in simulation and in a real inspection mission with three robotic platforms demonstrate the effectiveness of our approach in planning safer and more efficient routes by explicitly accounting for each platform's navigation capabilities. We release our framework, CHORAL, as open source to support reproducibility and deployment of diverse robot teams.