Multimodal Signal Processing For Thermo-Visible-Lidar Fusion In Real-time 3D Semantic Mapping
作者: Jiajun Sun, Yangyi Ou, Haoyuan Zheng, Chao yang, Yue Ma
分类: cs.RO, cs.CV
发布日期: 2026-01-14
备注: 5 pages,7 figures. Under review
💡 一句话要点
提出一种热-可见光-激光雷达融合的实时3D语义地图构建方法,增强复杂环境下的机器人感知能力。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多模态融合 语义SLAM 热成像 激光雷达 3D地图构建
📋 核心要点
- 现有SLAM技术在复杂环境中面临挑战,缺乏对环境语义信息的有效感知,限制了机器人的自主导航能力。
- 该方法通过融合热、可见光和激光雷达数据,提取热源特征并将其作为语义信息叠加到3D地图上,增强了环境理解。
- 该方法能够构建包含精确几何结构和热语义信息的3D地图,适用于灾害评估和工业维护等领域。
📝 摘要(中文)
本文提出了一种新颖的方法,用于利用热信息语义增强3D点云地图,以应对复杂环境中自主机器人导航和环境感知对SLAM技术提出的更高要求。该系统首先对可见光和红外图像进行像素级融合,然后将实时激光雷达点云投影到融合后的图像流上。接着,系统分割热通道中的热源特征,即时识别高温目标,并将温度信息作为语义层应用于最终的3D地图。该方法生成的地图不仅具有精确的几何结构,而且对环境具有关键的语义理解,使其在快速灾害评估和工业预防性维护等特定应用中具有很高的价值。
🔬 方法详解
问题定义:现有SLAM方法在复杂环境中,尤其是在需要识别特定目标(如热源)时,缺乏足够的环境语义信息。传统方法难以区分不同物体的属性,限制了机器人在灾害救援、工业检测等领域的应用。因此,需要一种能够有效融合多模态信息,并提取关键语义特征的SLAM系统。
核心思路:该论文的核心思路是利用热成像技术感知环境中的热源信息,并将其与可见光图像和激光雷达点云进行融合,从而为3D地图增加语义信息。通过将热源作为一种特殊的语义标签,可以帮助机器人更好地理解环境,并做出更合理的决策。
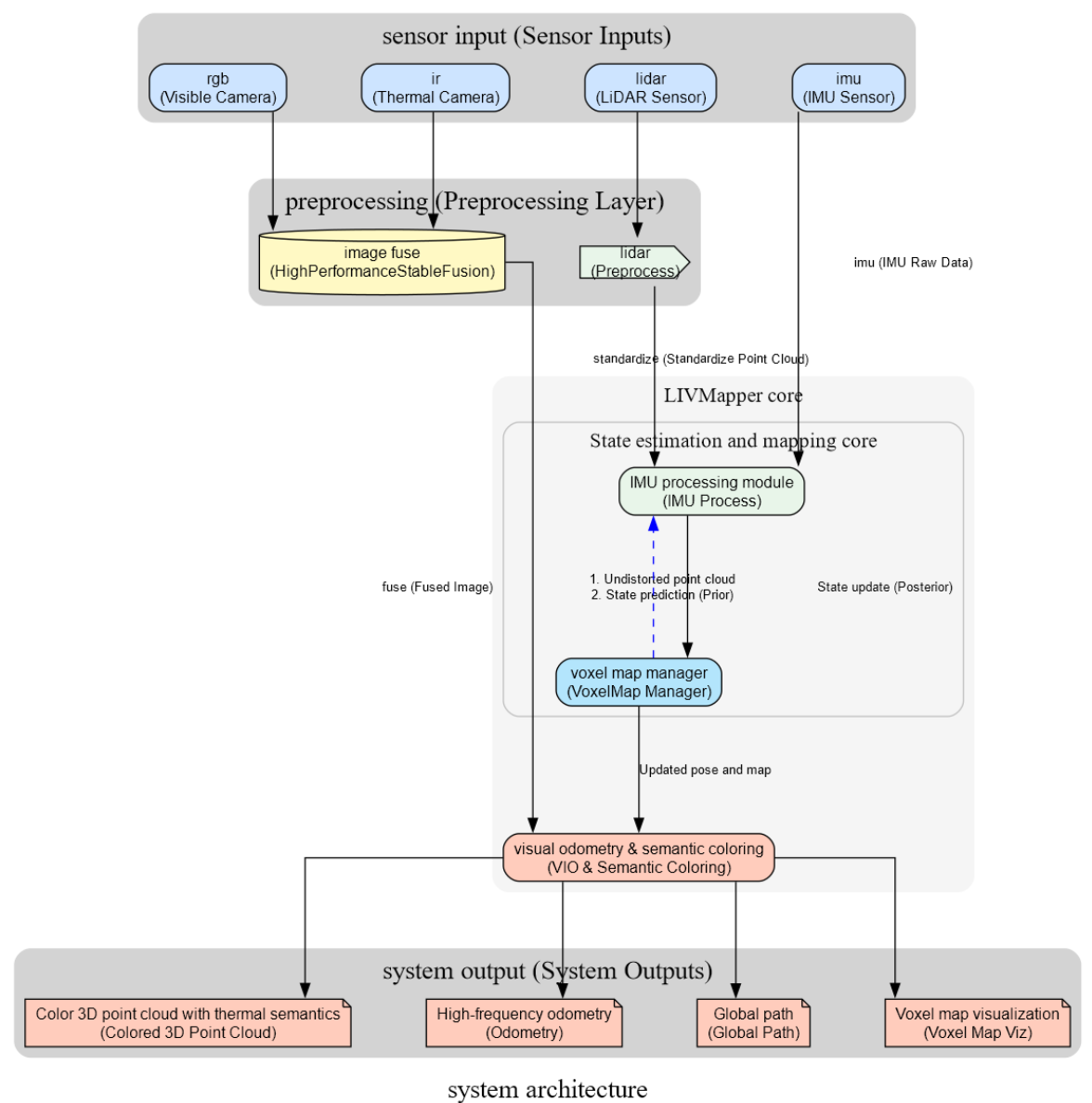
技术框架:该系统的整体框架包括以下几个主要模块:1) 可见光和红外图像的像素级融合;2) 实时激光雷达点云向融合图像的投影;3) 热通道中的热源特征分割;4) 将温度信息作为语义层添加到3D地图。该流程实现了多模态信息的有效整合,并最终生成具有语义信息的3D地图。
关键创新:该方法最重要的创新点在于将热信息引入到3D语义地图构建中。通过融合热成像数据,系统能够识别和定位环境中的热源,从而为机器人提供更丰富的环境理解。这种方法不同于传统的仅依赖几何信息的SLAM系统,能够提供更高级别的语义信息。
关键设计:论文中关键的设计包括:像素级图像融合算法的选择(具体算法未知),用于热源分割的算法(具体算法未知),以及如何将分割后的热源信息有效地映射到3D点云地图上。这些细节对于系统的性能至关重要,但论文摘要中并未详细描述。
🖼️ 关键图片

📊 实验亮点
摘要中没有提供具体的实验数据或性能指标。但可以推断,该方法通过融合热信息,能够有效识别和定位环境中的热源,从而显著提升3D地图的语义表达能力。与传统SLAM方法相比,该方法在特定应用场景下(如热源检测)具有更高的实用价值。具体的性能提升幅度未知。
🎯 应用场景
该研究成果可应用于多种领域,如快速灾害评估(例如火灾现场的热点定位)、工业预防性维护(例如检测设备过热点)以及安防监控等。通过提供包含热信息的3D语义地图,可以帮助机器人或人类操作员更快速、准确地识别潜在的危险或故障,从而提高工作效率和安全性。未来,该技术有望在更多需要环境感知和语义理解的领域发挥重要作用。
📄 摘要(原文)
In complex environments, autonomous robot navigation and environmental perception pose higher requirements for SLAM technology. This paper presents a novel method for semantically enhancing 3D point cloud maps with thermal information. By first performing pixel-level fusion of visible and infrared images, the system projects real-time LiDAR point clouds onto this fused image stream. It then segments heat source features in the thermal channel to instantly identify high temperature targets and applies this temperature information as a semantic layer on the final 3D map. This approach generates maps that not only have accurate geometry but also possess a critical semantic understanding of the environment, making it highly valuable for specific applications like rapid disaster assessment and industrial preventive maintenance.