Feedback-Based Mobile Robot Navigation in 3-D Environments Using Artificial Potential Functions Technical Report
作者: Ro'i Lang, Elon Rimon
分类: cs.RO, eess.SY
发布日期: 2026-01-14
💡 一句话要点
提出基于人工势场的三维空间移动机器人反馈导航方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 移动机器人导航 人工势场 三维空间 运动规划 多项式导航函数
📋 核心要点
- 现有移动机器人在复杂三维环境中导航时,容易陷入局部最小值,导致导航失败。
- 论文提出了一种基于多项式导航函数的人工势场方法,保证目标点是唯一的非退化最小值。
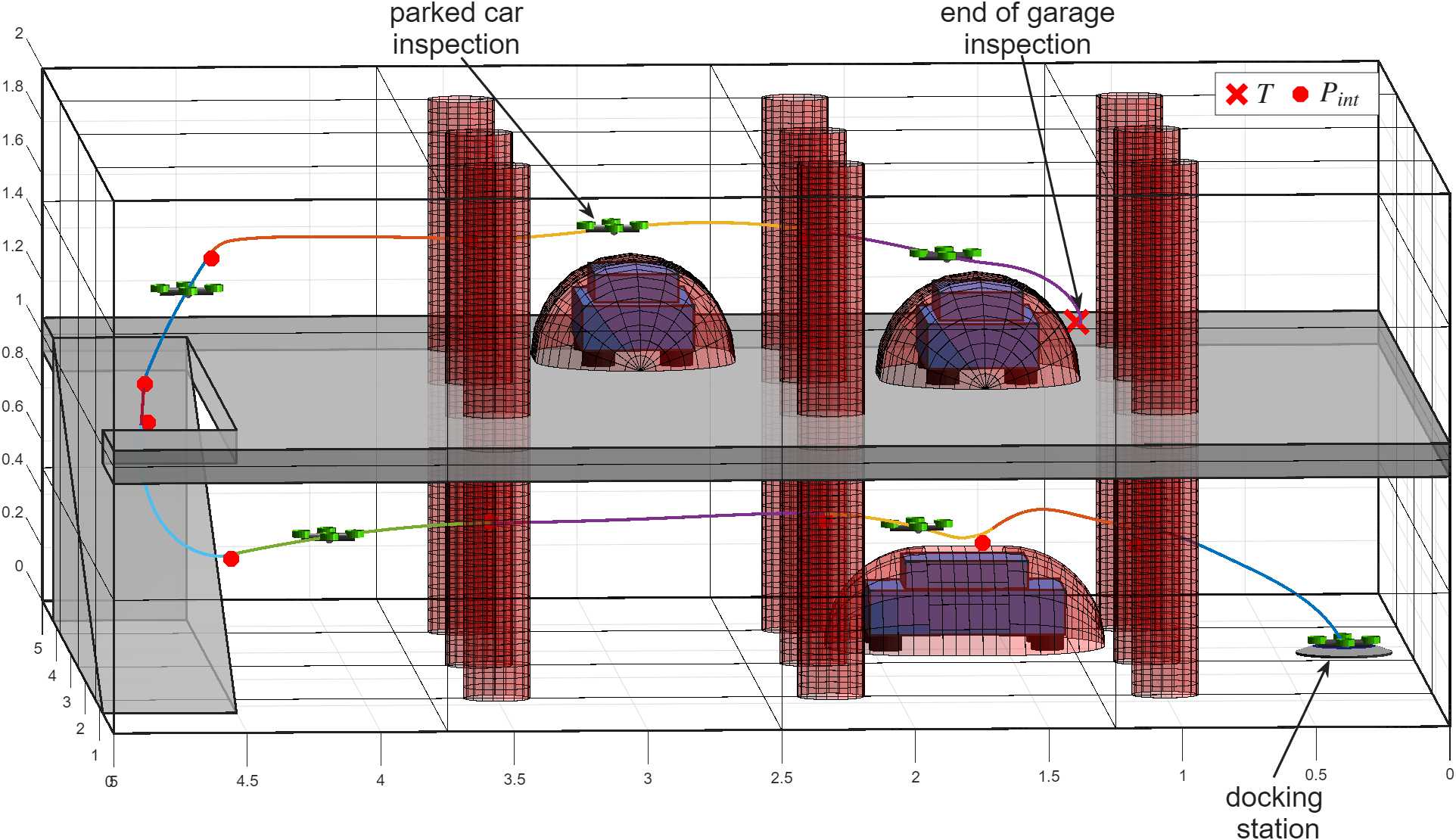
- 通过数值模拟验证了该方法在复杂三维环境中导航的有效性,特别是在存在多个障碍物时。
📝 摘要(中文)
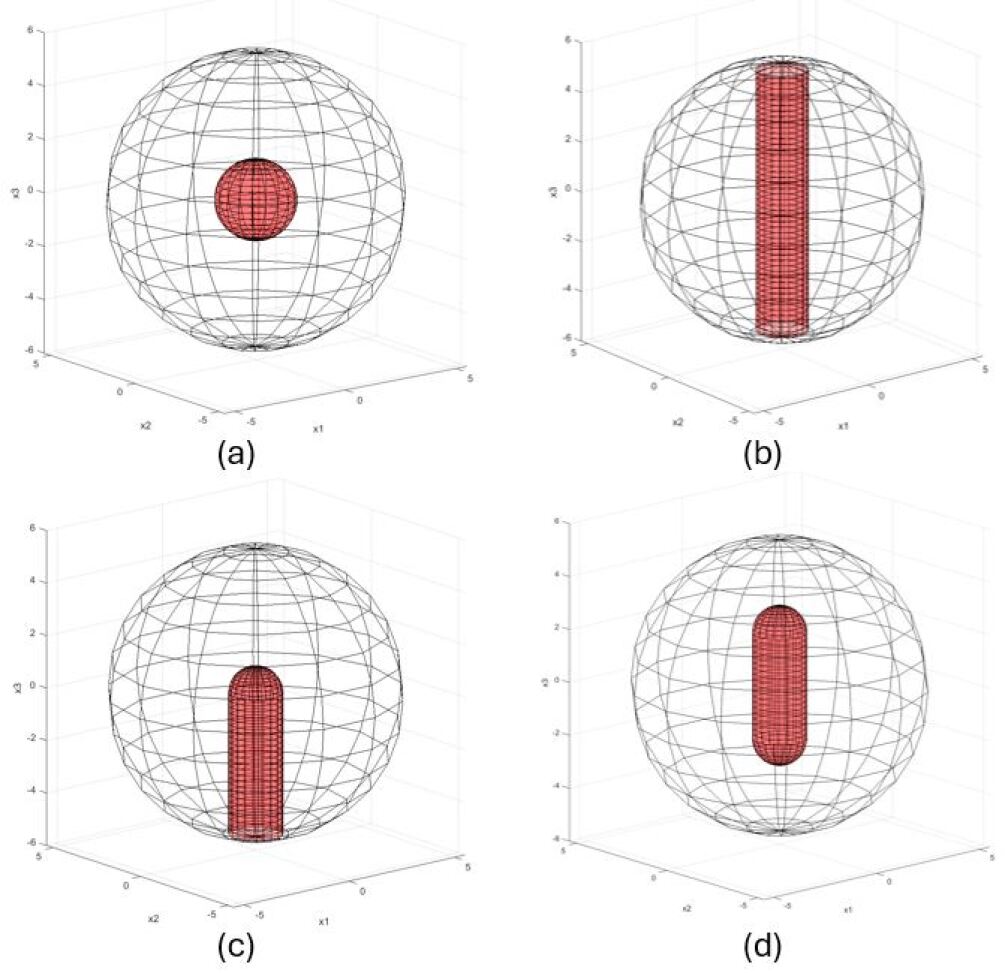
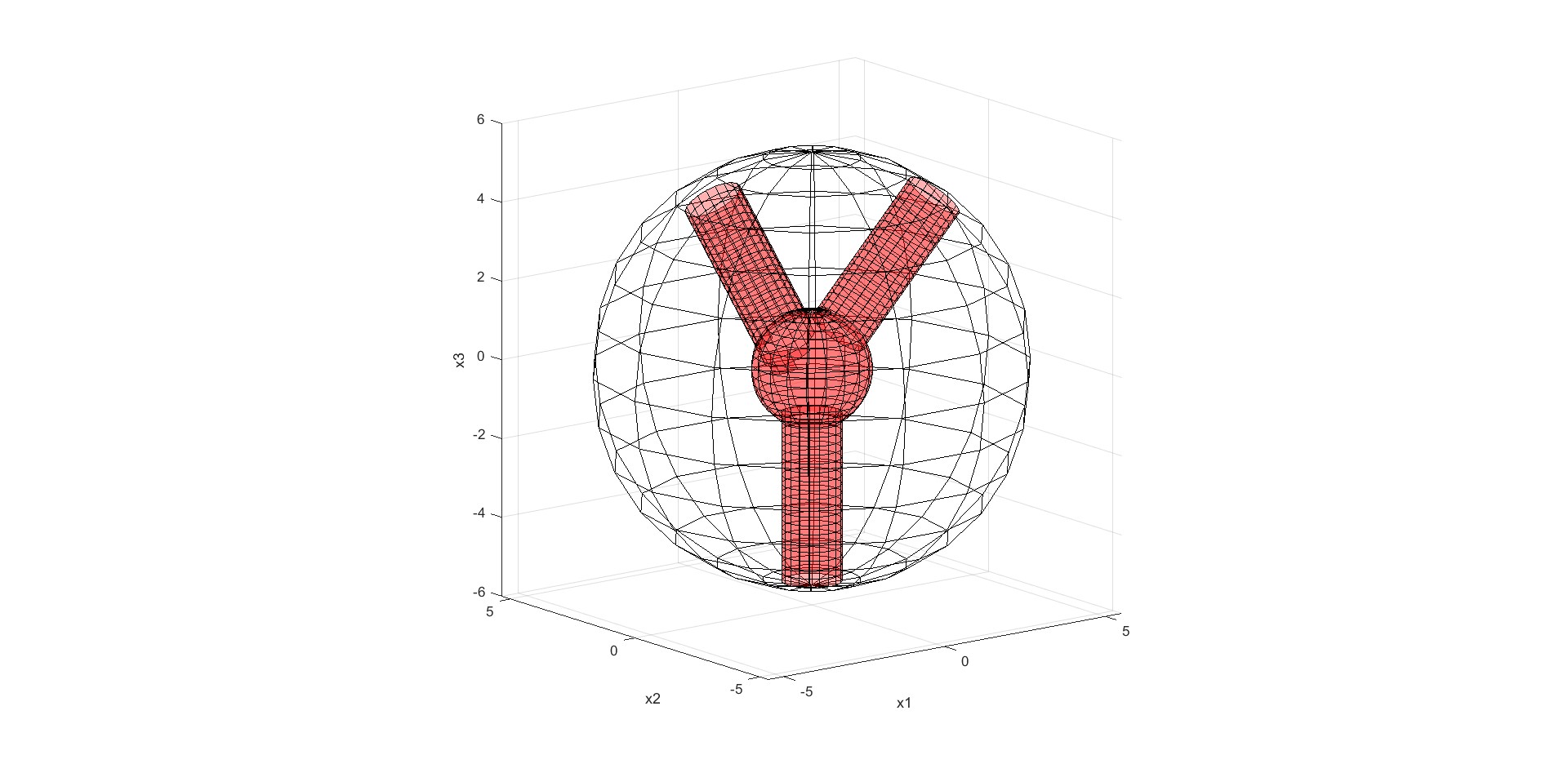
本技术报告提出了用于三维工作空间中运动规划的多项式导航函数的构建和分析,该工作空间由球形和圆柱形障碍物填充。工作空间被建模为一个有界的球形区域,障碍物使用平滑的多项式隐式函数进行编码。我们建立了在成对相交障碍物存在的情况下,所提出的导航函数在目标处允许唯一的非退化最小值,同时避免局部最小值出现的条件。提供了梯度和Hessian分析,并通过在障碍物丰富的三维环境中的数值模拟验证了理论结果。
🔬 方法详解
问题定义:论文旨在解决三维空间中移动机器人的导航问题,尤其是在存在多个球形和圆柱形障碍物的情况下。现有基于人工势场的导航方法容易陷入局部最小值,导致机器人无法到达目标点。因此,需要设计一种能够保证全局收敛到目标点,同时避免局部最小值的导航函数。
核心思路:论文的核心思路是构建一种多项式导航函数,该函数在目标点具有唯一的非退化最小值,并且在工作空间中没有其他局部最小值。通过精心设计多项式函数的参数,可以确保机器人在梯度下降的作用下,始终朝着目标点移动,从而避免陷入局部最小值。
技术框架:该方法首先将三维工作空间建模为一个有界的球形区域,并使用平滑的多项式隐式函数来表示障碍物。然后,构建一个多项式导航函数,该函数是目标点和障碍物隐式函数的组合。通过分析导航函数的梯度和Hessian矩阵,可以确定其局部最小值和鞍点。最后,通过数值模拟验证了该方法在复杂三维环境中的导航性能。
关键创新:该方法的关键创新在于提出了一种新的多项式导航函数,该函数能够保证在存在多个障碍物的情况下,目标点是唯一的非退化最小值。与传统的基于人工势场的方法相比,该方法能够有效地避免局部最小值问题,从而提高导航的可靠性。
关键设计:论文的关键设计包括:1) 使用平滑的多项式隐式函数来表示障碍物,这使得导航函数具有良好的可微性;2) 精心设计多项式导航函数的参数,以确保目标点是唯一的非退化最小值;3) 通过分析导航函数的梯度和Hessian矩阵,来验证其全局收敛性。
🖼️ 关键图片
📊 实验亮点
论文通过数值模拟验证了所提出的导航函数在障碍物丰富的三维环境中的有效性。实验结果表明,即使在存在成对相交的障碍物的情况下,该方法也能够保证机器人成功到达目标点,并且避免陷入局部最小值。这些结果验证了该方法的理论分析,并表明其具有良好的导航性能。
🎯 应用场景
该研究成果可应用于各种三维空间中的移动机器人导航任务,例如无人机自主飞行、水下机器人路径规划、以及在复杂室内环境中移动机器人的导航。该方法能够提高机器人在复杂环境中的导航可靠性和效率,具有重要的实际应用价值和潜在的商业前景。
📄 摘要(原文)
This technical report presents the construction and analysis of polynomial navigation functions for motion planning in 3-D workspaces populated by spherical and cylindrical obstacles. The workspace is modeled as a bounded spherical region, and obstacles are encoded using smooth polynomial implicit functions. We establish conditions under which the proposed navigation functions admit a unique non-degenerate minimum at the target while avoiding local minima, including in the presence of pairwise intersecting obstacles. Gradient and Hessian analyses are provided, and the theoretical results are validated through numerical simulations in obstacle rich 3-D environments.