Deep Whole-body Parkour
作者: Ziwen Zhuang, Shaoting Zhu, Mengjie Zhao, Hang Zhao
分类: cs.RO, cs.AI
发布日期: 2026-01-12
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出深度全身跑酷框架,实现人形机器人在复杂地形上的感知运动控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics) 支柱八:物理动画 (Physics-based Animation)
关键词: 全身运动控制 深度学习 人形机器人 复杂地形 感知运动 运动跟踪 强化学习
📋 核心要点
- 现有的人形机器人控制方法要么局限于踏板步态,要么忽略环境感知能力,难以在复杂地形上进行通用运动控制。
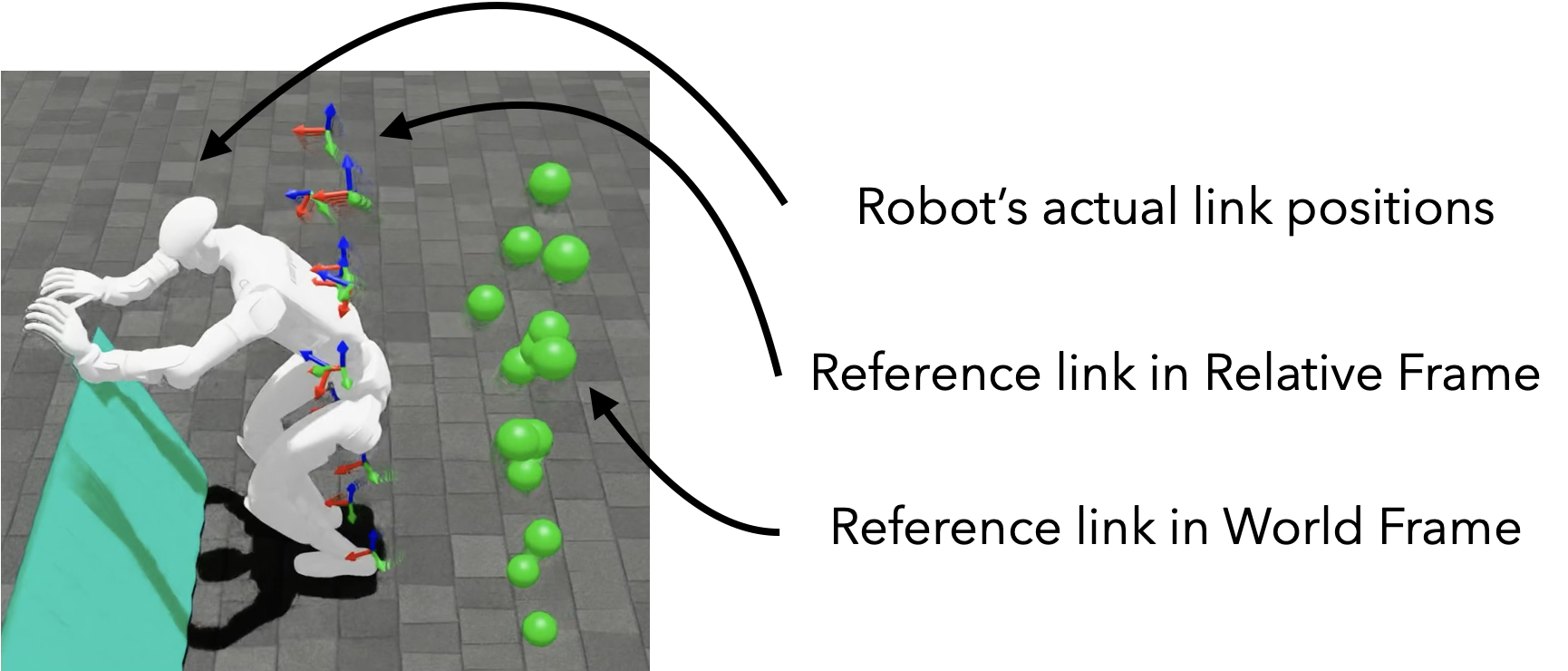
- 该论文的核心思想是将外感受感知融入全身运动跟踪,使机器人能够感知环境并执行动态的非移动任务。
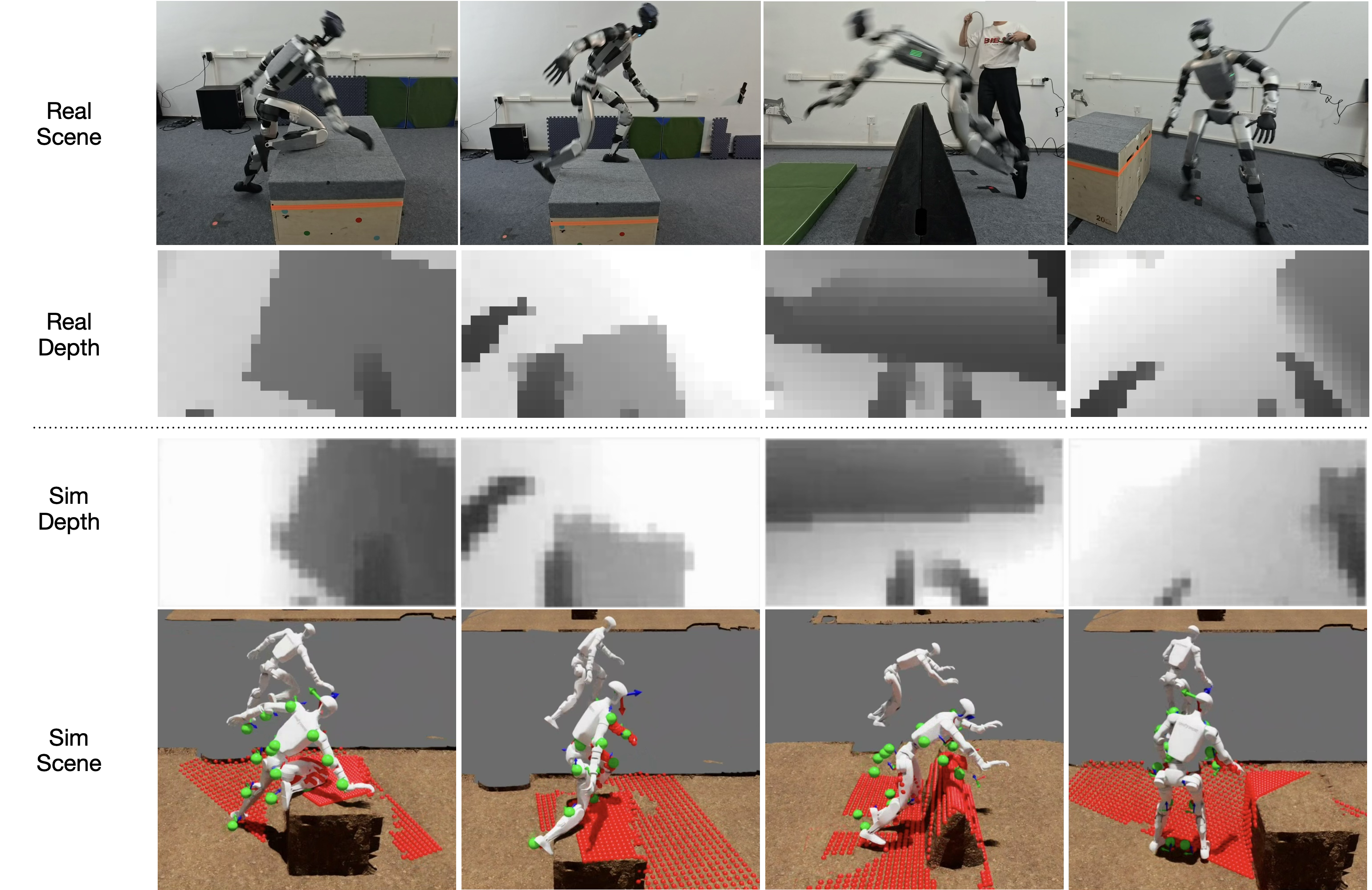
- 实验结果表明,该框架使机器人能够在非结构化地形上执行跳跃和翻滚等复杂动作,显著提升了机器人的 traversability。
📝 摘要(中文)
本文提出了一种将外感受感知融入全身运动跟踪的框架,旨在实现具有感知能力的通用运动控制。该框架使人形机器人能够在不平坦地形上执行高度动态的非移动任务。通过训练单个策略来执行跨越不同地形特征的多个不同动作,验证了将感知集成到控制循环中的重要性。实验结果表明,该框架能够在非结构化地形上实现稳健、高度动态的多接触运动,例如跳跃和翻滚,从而显著扩展了机器人超越简单行走或跑步的 traversability。
🔬 方法详解
问题定义:现有的人形机器人控制方法主要分为两类:感知运动和通用运动跟踪。感知运动擅长处理地形,但仅限于踏板步态;通用运动跟踪可以复现复杂技能,但忽略了环境感知能力。因此,如何在复杂地形上实现具有感知能力的通用运动控制是一个挑战。现有方法的痛点在于无法兼顾地形适应性和运动的复杂性。
核心思路:本文的核心思路是将外感受感知集成到全身运动跟踪中,从而使机器人能够感知环境并根据环境调整运动。通过这种方式,机器人可以执行高度动态的、非移动的任务,例如在不平坦的地形上进行跳跃和翻滚。这种设计使得机器人能够更好地适应复杂环境,并执行更复杂的运动。
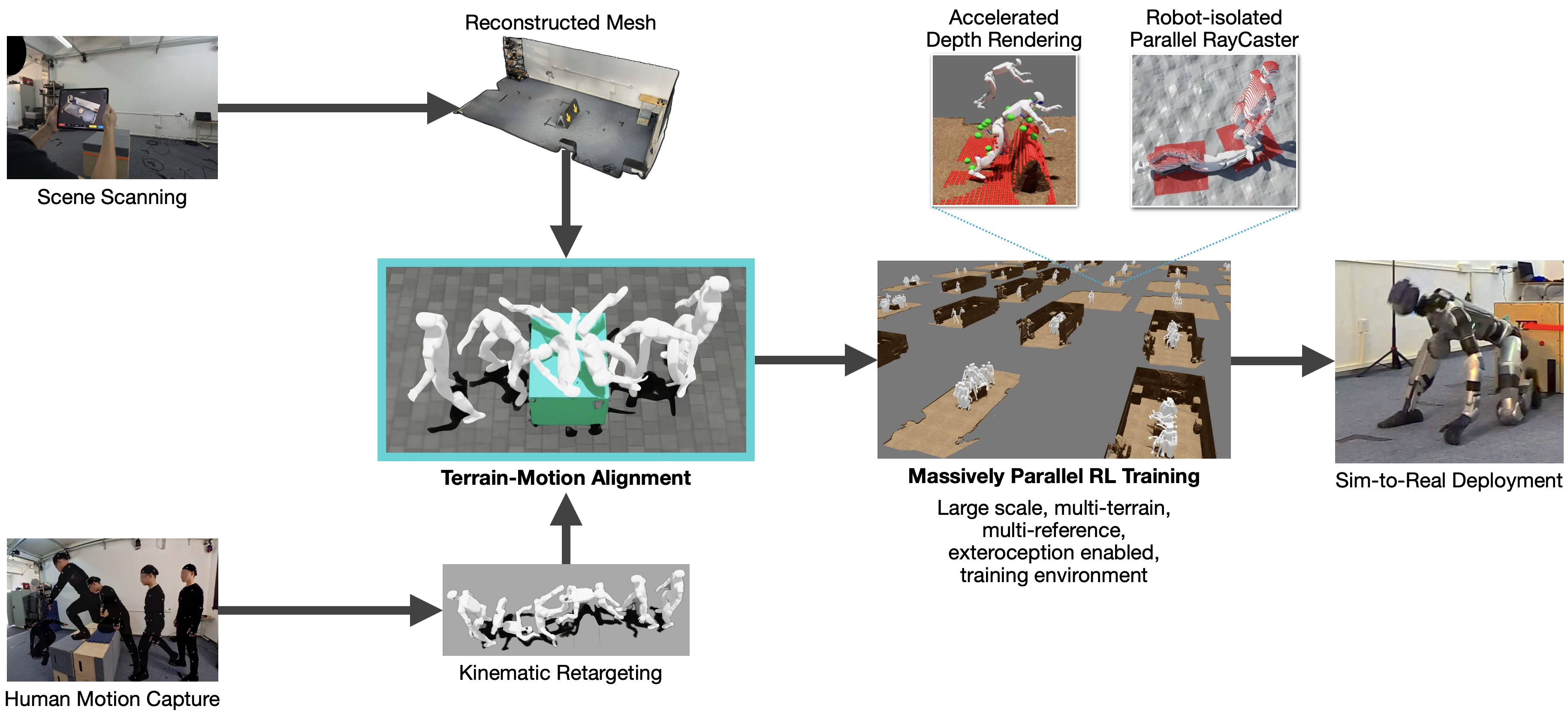
技术框架:该框架将外感受感知融入全身运动跟踪。具体流程为:首先,机器人通过传感器获取环境信息;然后,将环境信息输入到控制策略中;控制策略根据环境信息和目标运动生成控制指令;最后,机器人根据控制指令执行运动。该框架包含感知模块、控制策略模块和运动执行模块。
关键创新:该论文最重要的技术创新点在于将外感受感知集成到全身运动跟踪中。与现有方法相比,该方法能够使机器人更好地感知环境,并根据环境调整运动,从而实现更复杂、更鲁棒的运动控制。这种集成使得机器人能够在非结构化地形上执行高度动态的多接触运动。
关键设计:论文训练了一个单一的策略来执行多个不同的动作,并且在不同的地形特征上进行训练。具体的参数设置、损失函数和网络结构等技术细节在论文中没有详细描述,属于未知信息。但可以推测,损失函数可能包含运动跟踪误差、平衡约束和环境交互约束等。
🖼️ 关键图片
📊 实验亮点
该论文通过实验验证了所提出框架的有效性。实验结果表明,该框架使机器人能够在非结构化地形上执行跳跃和翻滚等复杂动作,显著提升了机器人的 traversability。具体的性能数据和提升幅度在摘要中没有明确给出,属于未知信息,但论文强调了在复杂地形上多接触运动的鲁棒性。
🎯 应用场景
该研究成果可应用于搜救机器人、探索机器人和辅助机器人等领域。例如,搜救机器人可以在灾难现场的复杂地形中进行搜索和救援;探索机器人可以在未知环境中进行探索和勘测;辅助机器人可以帮助人们在复杂环境中进行活动。该研究的实际价值在于提高了机器人在复杂环境中的适应性和运动能力,未来有望推动机器人技术在更多领域的应用。
📄 摘要(原文)
Current approaches to humanoid control generally fall into two paradigms: perceptive locomotion, which handles terrain well but is limited to pedal gaits, and general motion tracking, which reproduces complex skills but ignores environmental capabilities. This work unites these paradigms to achieve perceptive general motion control. We present a framework where exteroceptive sensing is integrated into whole-body motion tracking, permitting a humanoid to perform highly dynamic, non-locomotion tasks on uneven terrain. By training a single policy to perform multiple distinct motions across varied terrestrial features, we demonstrate the non-trivial benefit of integrating perception into the control loop. Our results show that this framework enables robust, highly dynamic multi-contact motions, such as vaulting and dive-rolling, on unstructured terrain, significantly expanding the robot's traversability beyond simple walking or running. https://project-instinct.github.io/deep-whole-body-parkour