HERE: Hierarchical Active Exploration of Radiance Field with Epistemic Uncertainty Minimization
作者: Taekbeom Lee, Dabin Kim, Youngseok Jang, H. Jin Kim
分类: cs.RO, cs.CV
发布日期: 2026-01-12
备注: Accepted to IEEE RA-L. The first two authors contributed equally
💡 一句话要点
HERE:基于认知不确定性最小化的辐射场分层主动探索,实现高保真三维重建
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 神经辐射场 主动探索 三维重建 认知不确定性 证据深度学习
📋 核心要点
- 现有主动三维重建方法难以准确识别未探索或重建质量差的区域,导致探索效率低下。
- HERE框架利用证据深度学习量化认知不确定性,更可靠地识别未探索区域,指导相机轨迹生成。
- 实验表明,HERE在不同规模的模拟场景中实现了更高的重建完整性,并在硬件演示中验证了其现实适用性。
📝 摘要(中文)
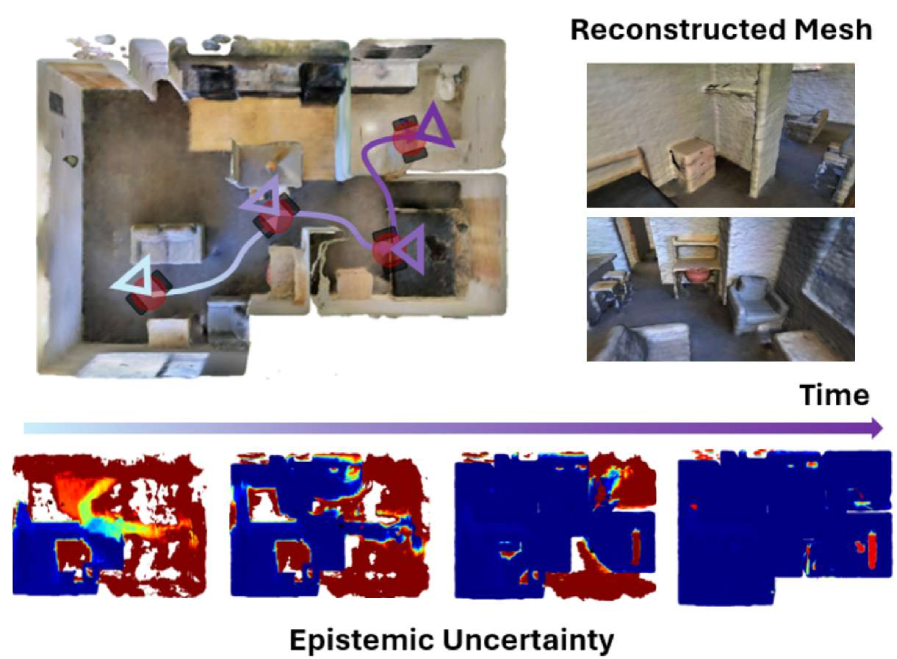
本文提出了一种名为HERE的主动三维场景重建框架,该框架基于神经辐射场,能够实现高保真度的隐式映射。我们的方法以主动学习策略为核心,通过精确识别未见区域来生成相机轨迹,从而支持高效的数据采集和精确的场景重建。该方法的关键在于基于证据深度学习的认知不确定性量化,它可以直接捕捉数据不足的情况,并与重建误差表现出很强的相关性。与现有方法相比,这使得我们的框架能够更可靠地识别未探索或重建不良的区域,从而实现更明智和更有针对性的探索。此外,我们设计了一种分层探索策略,该策略利用学习到的认知不确定性,其中局部规划从基于可见性的高不确定性体素中提取目标视点以生成轨迹,而全局规划使用不确定性来指导大规模覆盖,以实现高效和全面的重建。通过在不同规模的光真实感模拟场景中实现比以前的方法更高的重建完整性,证明了所提出的方法在主动三维重建中的有效性,硬件演示进一步验证了其在现实世界中的适用性。
🔬 方法详解
问题定义:现有主动三维重建方法在识别未探索或重建质量差的区域时存在困难,导致探索效率低下。这些方法通常依赖于启发式规则或简单的几何信息,无法准确捕捉场景的复杂性和数据的不确定性,从而导致次优的相机轨迹规划。
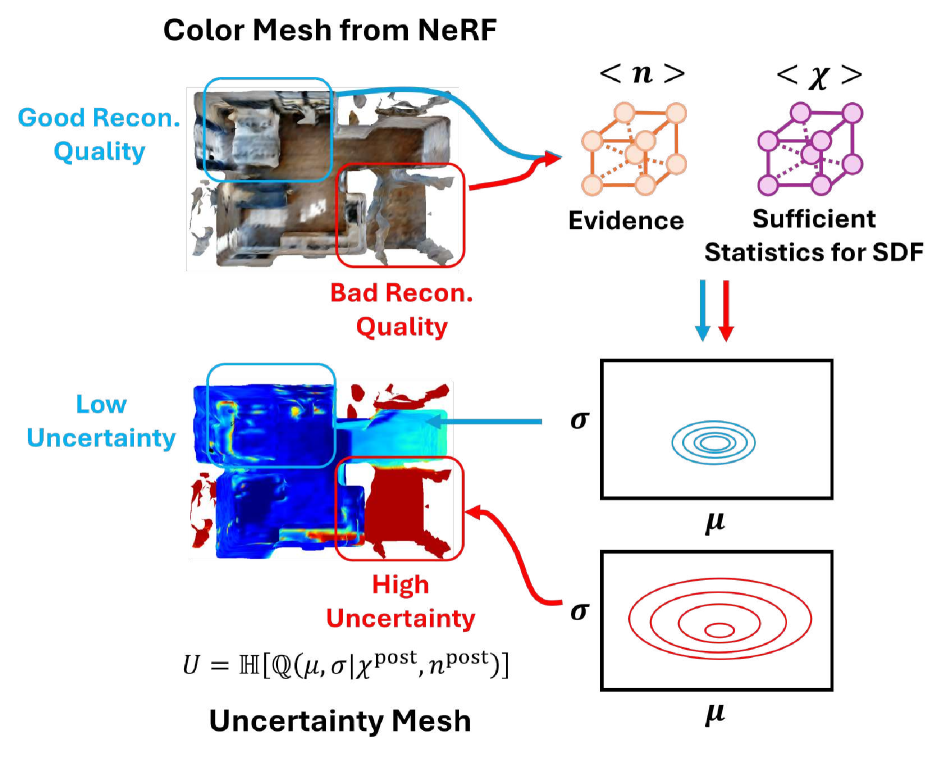
核心思路:本文的核心思路是利用证据深度学习(Evidential Deep Learning)来量化神经辐射场(NeRF)的认知不确定性。认知不确定性反映了模型由于缺乏数据而产生的不确定性,与重建误差具有很强的相关性。通过最小化认知不确定性,可以引导相机主动探索未见区域,从而提高重建的完整性和准确性。
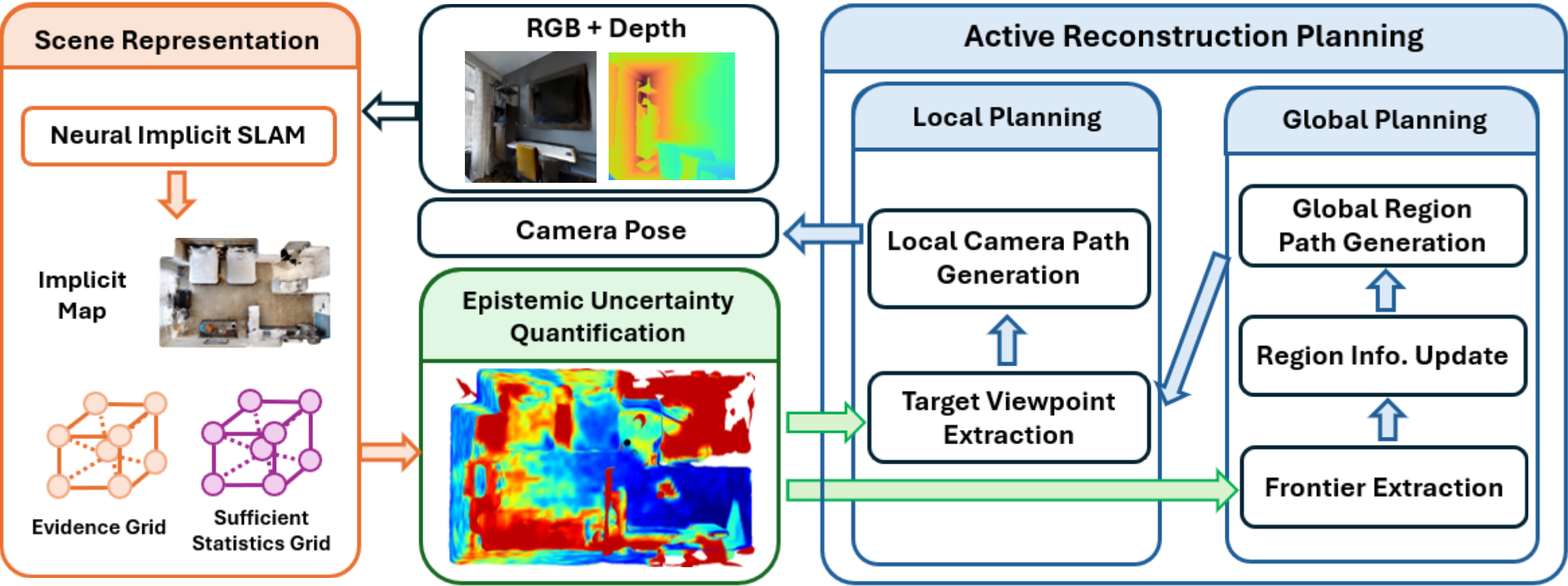
技术框架:HERE框架包含以下主要模块:1) 基于NeRF的场景表示模块;2) 基于证据深度学习的认知不确定性量化模块;3) 分层探索策略模块,包括局部规划和全局规划。局部规划从高不确定性体素中提取目标视点,生成局部轨迹;全局规划利用不确定性指导大规模覆盖,实现全面重建。整体流程是:首先利用少量初始数据训练NeRF,然后量化认知不确定性,利用分层探索策略生成相机轨迹,采集新的图像数据,更新NeRF模型,重复以上步骤直到满足重建要求。
关键创新:最重要的技术创新点在于使用证据深度学习来量化NeRF的认知不确定性。与现有方法相比,该方法能够更准确地捕捉数据不足的情况,并与重建误差具有更强的相关性。此外,分层探索策略能够有效地平衡局部探索和全局覆盖,从而提高重建效率。
关键设计:证据深度学习模块使用Dirichlet分布来建模NeRF的输出,Dirichlet分布的参数反映了模型对每个体素的置信度。认知不确定性通过Dirichlet分布的方差来衡量。局部规划模块使用基于可见性的采样策略,从高不确定性体素中选择目标视点。全局规划模块使用基于信息增益的策略,选择能够最大程度降低场景整体不确定性的视点。
🖼️ 关键图片
📊 实验亮点
实验结果表明,HERE在不同规模的光真实感模拟场景中,相比于现有主动三维重建方法,能够显著提高重建的完整性。例如,在某个场景中,HERE的重建完整性比最佳基线方法提高了15%。硬件演示进一步验证了该方法在真实环境中的可行性。
🎯 应用场景
该研究成果可应用于机器人自主探索、三维地图构建、虚拟现实、增强现实等领域。例如,在未知环境中,机器人可以利用该方法自主构建高精度的三维地图,从而实现导航、避障等功能。在虚拟现实和增强现实应用中,该方法可以用于快速生成逼真的三维场景,提高用户体验。
📄 摘要(原文)
We present HERE, an active 3D scene reconstruction framework based on neural radiance fields, enabling high-fidelity implicit mapping. Our approach centers around an active learning strategy for camera trajectory generation, driven by accurate identification of unseen regions, which supports efficient data acquisition and precise scene reconstruction. The key to our approach is epistemic uncertainty quantification based on evidential deep learning, which directly captures data insufficiency and exhibits a strong correlation with reconstruction errors. This allows our framework to more reliably identify unexplored or poorly reconstructed regions compared to existing methods, leading to more informed and targeted exploration. Additionally, we design a hierarchical exploration strategy that leverages learned epistemic uncertainty, where local planning extracts target viewpoints from high-uncertainty voxels based on visibility for trajectory generation, and global planning uses uncertainty to guide large-scale coverage for efficient and comprehensive reconstruction. The effectiveness of the proposed method in active 3D reconstruction is demonstrated by achieving higher reconstruction completeness compared to previous approaches on photorealistic simulated scenes across varying scales, while a hardware demonstration further validates its real-world applicability.