Local Path Optimization in The Latent Space Using Learned Distance Gradient
作者: Jiawei Zhang, Chengchao Bai, Wei Pan, Tianhang Liu, Jifeng Guo
分类: cs.RO
发布日期: 2025-12-30
备注: This paper has been published in IROS 2025
期刊: 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, 2025, pp. 15940-15946
DOI: 10.1109/IROS60139.2025.11247535
💡 一句话要点
提出基于学习距离梯度的局部路径优化方法,加速机器人约束运动规划。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人操作 约束运动规划 潜在空间 距离梯度 局部路径优化 神经网络 碰撞避免
📋 核心要点
- 约束运动规划是机器人操作中的难题,现有基于流形近似的潜在运动方法虽然高效,但易受流形近似误差和潜在空间冲突识别困难的影响。
- 本文提出一种新方法,训练神经网络预测潜在空间中机器人与障碍物的距离,并利用学习到的距离梯度引导局部路径优化,避开障碍物。
- 实验结果表明,该方法在多个规划场景中实现了最快的规划速度,验证了其在加速约束运动规划方面的有效性。
📝 摘要(中文)
本文针对机器人操作中常见的约束运动规划问题,提出了一种新的数据驱动方法。该方法利用流形近似的潜在运动方法,通过训练神经网络预测机器人与障碍物之间的最小距离,并将潜在向量作为输入。学习到的距离梯度用于计算潜在空间中的移动方向,使机器人远离障碍物。在此基础上,提出了一种潜在空间中的局部路径优化算法,并将其与路径有效性检查过程相结合,以减少重新规划的时间。在多个规划场景中,该方法与最先进的算法进行了比较,结果表明该方法具有最快的规划速度。
🔬 方法详解
问题定义:论文旨在解决机器人约束运动规划问题,尤其是在基于潜在空间的运动规划方法中,由于流形近似误差和潜在空间冲突识别的困难,导致需要耗时的路径有效性检查和路径重新规划。现有方法在处理复杂环境和高维空间时效率较低。
核心思路:论文的核心思路是利用神经网络学习潜在空间中机器人与障碍物之间的距离函数,并进一步学习距离梯度。通过距离梯度,可以在潜在空间中引导机器人远离障碍物,从而优化局部路径,减少碰撞风险,并降低路径重新规划的频率。
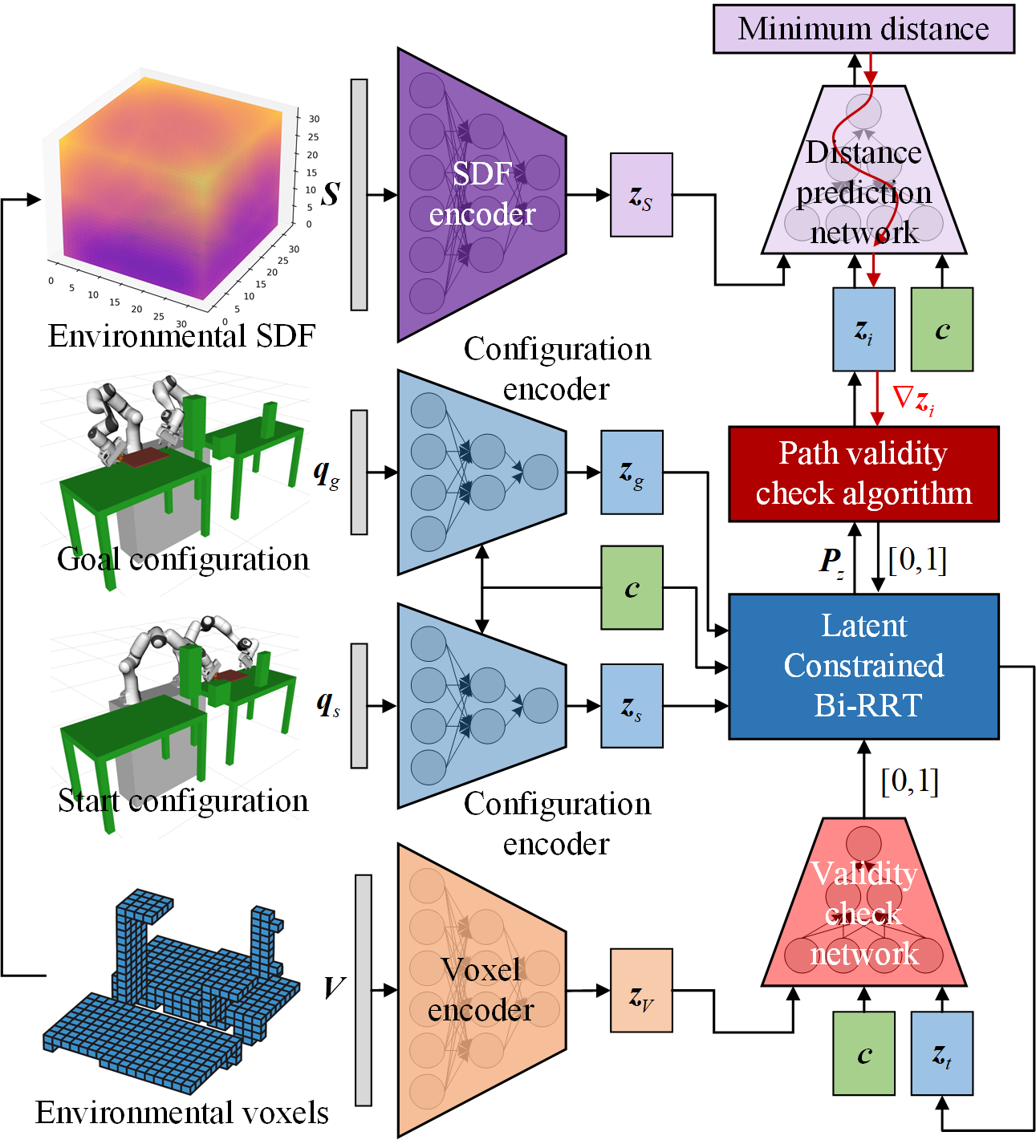
技术框架:该方法主要包含以下几个阶段:1) 使用流形近似方法构建潜在空间;2) 训练神经网络,输入为潜在向量,输出为机器人与障碍物之间的最小距离;3) 利用训练好的神经网络计算距离梯度;4) 在潜在空间中,使用距离梯度进行局部路径优化;5) 将优化后的路径映射回原始空间,并进行路径有效性检查。
关键创新:该方法最重要的创新点在于利用学习到的距离梯度在潜在空间中进行局部路径优化。与传统的碰撞检测方法相比,该方法能够更高效地估计碰撞风险,并指导路径规划器快速找到无碰撞路径。此外,将局部路径优化与路径有效性检查相结合,进一步减少了重新规划的时间。
关键设计:神经网络的结构和损失函数是关键设计。网络结构需要能够有效地从潜在向量中提取距离信息。损失函数的设计需要能够准确地反映机器人与障碍物之间的距离,并保证学习到的距离梯度能够有效地指导路径优化。具体的网络结构、损失函数和训练参数等细节在论文中应该有详细描述(未知)。
🖼️ 关键图片


📊 实验亮点
论文通过实验验证了所提出方法的有效性。在多个规划场景中,该方法与最先进的算法进行了比较,实验结果表明,该方法能够显著提高规划速度,并保持较高的规划成功率。具体的性能数据(例如,规划时间减少的百分比)和对比基线需要在论文中查找(未知)。
🎯 应用场景
该研究成果可应用于各种机器人操作任务,例如装配、抓取、避障导航等。通过提高约束运动规划的速度和成功率,可以显著提升机器人的自主性和适应性,使其能够在复杂和动态的环境中安全可靠地完成任务。该方法在工业自动化、服务机器人、医疗机器人等领域具有广阔的应用前景。
📄 摘要(原文)
Constrained motion planning is a common but challenging problem in robotic manipulation. In recent years, data-driven constrained motion planning algorithms have shown impressive planning speed and success rate. Among them, the latent motion method based on manifold approximation is the most efficient planning algorithm. Due to errors in manifold approximation and the difficulty in accurately identifying collision conflicts within the latent space, time-consuming path validity checks and path replanning are required. In this paper, we propose a method that trains a neural network to predict the minimum distance between the robot and obstacles using latent vectors as inputs. The learned distance gradient is then used to calculate the direction of movement in the latent space to move the robot away from obstacles. Based on this, a local path optimization algorithm in the latent space is proposed, and it is integrated with the path validity checking process to reduce the time of replanning. The proposed method is compared with state-of-the-art algorithms in multiple planning scenarios, demonstrating the fastest planning speed