PreGME: Prescribed Performance Control of Aerial Manipulators based on Variable-Gain ESO
作者: Mengyu Ji, Shiliang Guo, Zhengzhen Li, Jiahao Shen, Huazi Cao, Shiyu Zhao
分类: cs.RO, eess.SY
发布日期: 2025-12-28
备注: 12 pages, 6 figures
💡 一句话要点
提出基于变增益ESO的预设性能控制方法PreGME,用于提升空中机械臂的运动控制精度与鲁棒性。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 空中机械臂 预设性能控制 扩展状态观测器 动态耦合 运动控制 变增益控制 无人机
📋 核心要点
- 空中机械臂存在多旋翼基座和机械臂之间的显著动态耦合,实现精确和鲁棒的运动控制极具挑战。
- PreGME方法通过变增益ESO实时估计动态耦合,并结合预设性能控制,保证跟踪误差在预设范围内。
- 真实平台实验验证了PreGME的有效性,即使在剧烈机械臂运动下,也能实现高精度跟踪控制。
📝 摘要(中文)
本文提出了一种新颖的基于变增益扩展状态观测器(ESOs)的预设性能运动控制框架PreGME,用于解决空中机械臂的精确和鲁棒运动控制问题。该方法利用变增益ESOs实时估计动态耦合,并结合包含误差轨迹约束的预设性能飞行控制。与现有方法相比,该方法能够精确估计快速变化的动态耦合,从而处理需要机械臂剧烈运动的操作任务。通过预设性能,生成预设误差轨迹来引导系统演化,确保跟踪误差保持在预设性能范围内,实现高精度控制。在真实平台上的空中杆旋转、空中调酒和空中拉车实验验证了该方法的有效性。实验结果表明,即使在快速机械臂运动引起的动态耦合下(末端执行器速度:1.02 m/s,加速度:5.10 m/s$^2$),该方法也能实现高跟踪性能。
🔬 方法详解
问题定义:空中机械臂由于其多旋翼基座和机械臂之间的强动态耦合,难以实现精确和鲁棒的运动控制。现有方法在处理机械臂快速运动时,动态耦合估计不准确,导致控制性能下降。
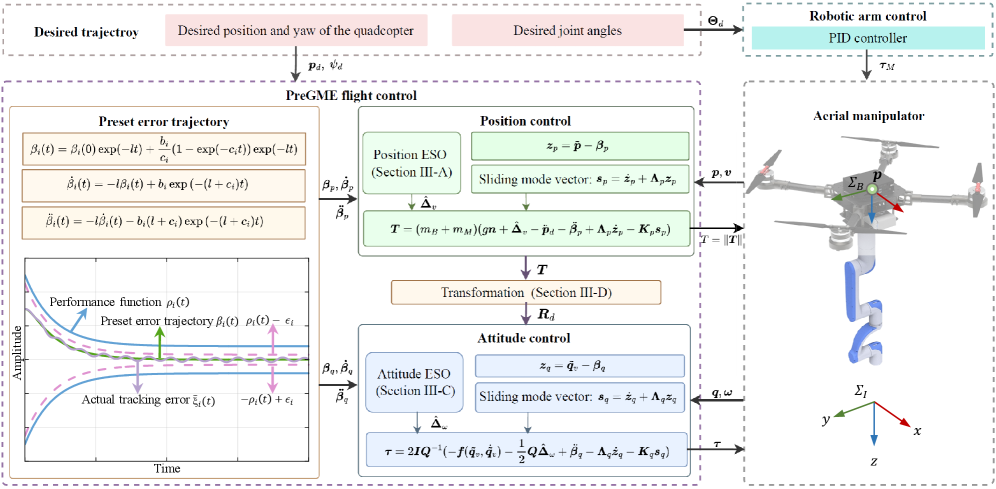
核心思路:本文的核心思路是利用变增益扩展状态观测器(ESO)来实时、准确地估计动态耦合,并结合预设性能控制,确保跟踪误差始终保持在预设的性能范围内。通过这种方式,即使在机械臂进行剧烈运动时,也能保证系统的稳定性和控制精度。
技术框架:PreGME框架主要包含两个核心模块:变增益扩展状态观测器(VG-ESO)和预设性能控制器。VG-ESO用于实时估计空中机械臂的动态耦合,并将估计结果反馈给预设性能控制器。预设性能控制器则根据预设的误差轨迹,生成控制指令,驱动空中机械臂运动。整个系统形成一个闭环控制,从而实现高精度和鲁棒性的运动控制。
关键创新:该方法最重要的创新在于采用了变增益扩展状态观测器(VG-ESO)。与传统的固定增益ESO相比,VG-ESO能够根据系统的状态动态调整增益,从而更准确地估计快速变化的动态耦合。此外,预设性能控制的引入,保证了跟踪误差始终在预设范围内,提高了系统的鲁棒性。
关键设计:变增益ESO的关键在于增益的自适应调整策略,通常基于误差或系统状态设计增益函数。预设性能控制的关键在于设计合适的性能函数,该函数决定了误差收敛的速度和范围。此外,控制器的参数整定也至关重要,需要根据具体的空中机械臂系统进行调整。
🖼️ 关键图片


📊 实验亮点
实验结果表明,即使在机械臂末端执行器速度达到1.02 m/s,加速度达到5.10 m/s$^2$的剧烈运动下,PreGME方法依然能够实现高精度的跟踪控制。通过空中杆旋转、空中调酒和空中拉车等实验,验证了该方法在复杂动态环境下的有效性和鲁棒性。这些实验结果表明,PreGME方法在实际应用中具有显著优势。
🎯 应用场景
该研究成果可应用于多种空中作业场景,如空中巡检、空中物流、空中救援、高空建筑维护等。通过提高空中机械臂的运动控制精度和鲁棒性,可以实现更安全、高效的空中作业,降低人工成本和风险。未来,该技术有望进一步拓展到更复杂的空中操作任务中。
📄 摘要(原文)
An aerial manipulator, comprising a multirotor base and a robotic arm, is subject to significant dynamic coupling between these two components. Therefore, achieving precise and robust motion control is a challenging yet important objective. Here, we propose a novel prescribed performance motion control framework based on variable-gain extended state observers (ESOs), referred to as PreGME. The method includes variable-gain ESOs for real-time estimation of dynamic coupling and a prescribed performance flight control that incorporates error trajectory constraints. Compared with existing methods, the proposed approach exhibits the following two characteristics. First, the adopted variable-gain ESOs can accurately estimate rapidly varying dynamic coupling. This enables the proposed method to handle manipulation tasks that require aggressive motion of the robotic arm. Second, by prescribing the performance, a preset error trajectory is generated to guide the system evolution along this trajectory. This strategy allows the proposed method to ensure the tracking error remains within the prescribed performance envelope, thereby achieving high-precision control. Experiments on a real platform, including aerial staff twirling, aerial mixology, and aerial cart-pulling experiments, are conducted to validate the effectiveness of the proposed method. Experimental results demonstrate that even under the dynamic coupling caused by rapid robotic arm motion (end-effector velocity: 1.02 m/s, acceleration: 5.10 m/s$^2$), the proposed method achieves high tracking performance.