Bugs with Features: Vision-Based Fault-Tolerant Collective Motion Inspired by Nature
作者: Peleg Shefi, Amir Ayali, Gal A. Kaminka
分类: cs.RO, cs.MA
发布日期: 2025-12-27
期刊: Auton Robot 49, 39 (2025)
DOI: 10.1007/s10514-025-10230-7
💡 一句话要点
提出基于视觉的容错集体运动机制,提升机器人集群在故障情况下的鲁棒性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 集体运动 机器人集群 视觉感知 容错控制 鲁棒性 距离估计 间歇性运动
📋 核心要点
- 现有的人工集群在视觉感知受限和存在故障机器人时,鲁棒性较差,容易崩溃。
- 受蝗虫集体运动启发,论文提出结合视觉信息的鲁棒距离估计和间歇性运动机制。
- 仿真实验表明,该方法显著提高了集群在存在故障机器人时的容错能力和整体鲁棒性。
📝 摘要(中文)
在集体运动中,感知受限的个体在没有中心控制的情况下以有序的方式移动。每个个体的感知是高度局部的,并且其与其他个体交互的能力也是局部的。虽然自然集体运动是鲁棒的,但大多数人工集群是脆弱的。当视觉被用作感知方式时,由于视觉感知中固有的模糊性和信息丢失,这种情况尤其会发生。本文提出了一种受蝗虫研究启发的鲁棒集体运动机制。首先,我们开发了一种鲁棒的距离估计方法,该方法结合了视觉感知的邻居的水平和垂直尺寸。其次,我们引入间歇性运动作为一种机制,允许机器人可靠地检测未能跟上的同伴,并扰乱集群的运动。我们展示了如何以对将它们分类为错误的错误具有鲁棒性的方式来避免这种有故障的机器人。通过广泛的基于物理的仿真实验,我们展示了使用这些技术时集群弹性的显着提高。我们表明,这些技术与基于距离的避免-吸引模型以及依赖于对齐的模型相关,适用于各种实验设置。
🔬 方法详解
问题定义:论文旨在解决在基于视觉的机器人集群中,由于视觉感知的局限性和误差,以及部分机器人出现故障(例如停止运动)时,集群的整体运动容易被打乱,导致集群崩溃的问题。现有方法对这些问题缺乏有效的容错机制。
核心思路:论文的核心思路是模仿蝗虫的集体运动行为,设计一种鲁棒的距离估计方法和间歇性运动机制。鲁棒距离估计利用视觉信息中的水平和垂直尺寸,减少距离估计误差;间歇性运动则允许机器人检测并规避故障机器人,从而维持集群的整体运动。
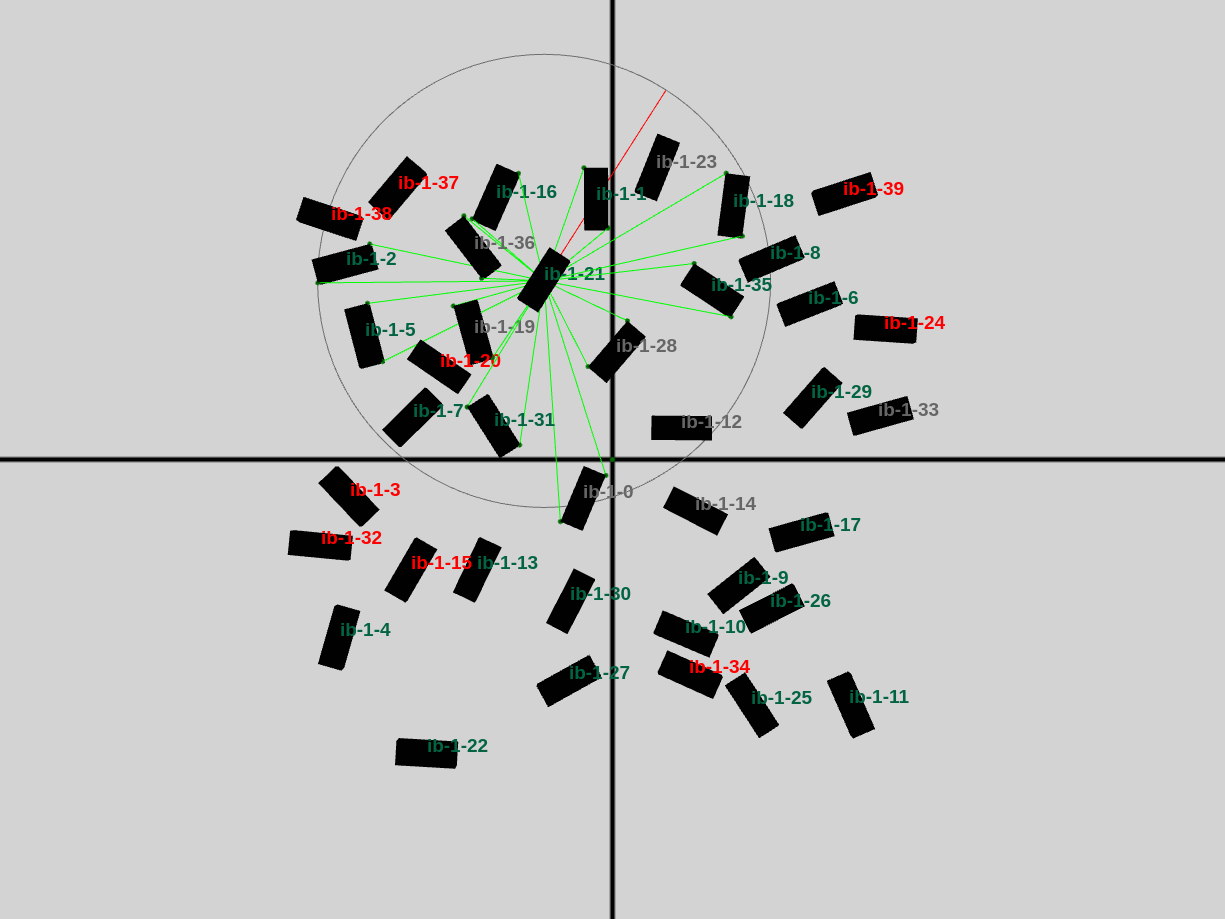
技术框架:整体框架包含两个主要模块:1) 鲁棒距离估计模块:该模块利用机器人视觉传感器获取的邻居机器人的图像信息,结合水平和垂直尺寸信息,估计邻居机器人与自身的距离。2) 间歇性运动模块:机器人并非持续运动,而是周期性地停止运动,观察周围其他机器人的运动状态。如果发现有机器人停止运动或运动速度过慢,则判断其为故障机器人,并调整自身运动方向,避开该故障机器人。
关键创新:论文的关键创新在于将生物学中的集体运动机制应用于机器人集群控制,并针对视觉感知的特点设计了鲁棒的距离估计方法和间歇性运动机制。与传统的基于精确距离感知的集群控制方法不同,该方法能够在视觉信息不完整和存在误差的情况下,维持集群的稳定运动。
关键设计:鲁棒距离估计的关键设计在于融合了水平和垂直尺寸信息,以减少单一尺寸信息带来的误差。间歇性运动的关键设计在于周期性停止运动的时长和频率的选择,需要在保证检测到故障机器人的同时,避免过度干扰集群的整体运动。具体的参数设置(例如停止运动的时长、距离阈值等)需要根据实际的机器人和环境进行调整。
🖼️ 关键图片

📊 实验亮点
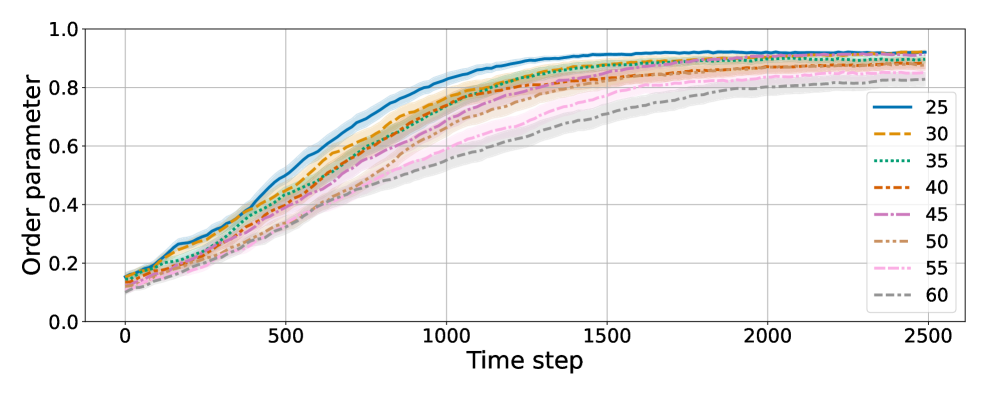
仿真实验结果表明,使用论文提出的鲁棒距离估计和间歇性运动机制后,机器人集群在存在故障机器人时的崩溃率显著降低。在某些实验设置下,集群的崩溃率降低了50%以上。此外,该方法对不同的集群控制模型(如Avoid-Attract模型和Alignment模型)均有效,具有较强的通用性。
🎯 应用场景
该研究成果可应用于无人机集群、水下机器人集群、地面机器人集群等多种场景,尤其适用于环境复杂、感知信息受限的场景。例如,在灾难救援中,无人机集群可以利用该方法在通信受阻、环境恶劣的情况下,自主完成搜索和救援任务。此外,该方法还可以应用于农业、物流等领域,提高机器人集群的工作效率和可靠性。
📄 摘要(原文)
In collective motion, perceptually-limited individuals move in an ordered manner, without centralized control. The perception of each individual is highly localized, as is its ability to interact with others. While natural collective motion is robust, most artificial swarms are brittle. This particularly occurs when vision is used as the sensing modality, due to ambiguities and information-loss inherent in visual perception. This paper presents mechanisms for robust collective motion inspired by studies of locusts. First, we develop a robust distance estimation method that combines visually perceived horizontal and vertical sizes of neighbors. Second, we introduce intermittent locomotion as a mechanism that allows robots to reliably detect peers that fail to keep up, and disrupt the motion of the swarm. We show how such faulty robots can be avoided in a manner that is robust to errors in classifying them as faulty. Through extensive physics-based simulation experiments, we show dramatic improvements to swarm resilience when using these techniques. We show these are relevant to both distance-based Avoid-Attract models, as well as to models relying on Alignment, in a wide range of experiment settings.