Spatiotemporal Tubes for Probabilistic Temporal Reach-Avoid-Stay Task in Uncertain Dynamic Environment
作者: Siddhartha Upadhyay, Ratnangshu Das, Pushpak Jagtap
分类: cs.RO, eess.SY
发布日期: 2025-12-25
💡 一句话要点
提出时空管道框架,解决不确定动态环境中概率时序可达-避障-停留任务
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 时空管道 概率安全 动态环境 机器人控制 避障 时序任务 不确定性
📋 核心要点
- 现有方法难以在不确定动态环境中保证机器人完成概率时序任务,面临避障和任务完成的双重挑战。
- 论文提出基于时空管道(STT)的控制方法,通过在线调整管道中心和半径,适应不确定环境。
- 实验表明,该方法在移动机器人、无人机和机械臂上均能有效完成任务,并保证概率安全。
📝 摘要(中文)
本文扩展了时空管道(STT)框架,以解决不确定动态环境中概率时序可达-避障-停留(PrT-RAS)任务。我们开发了一种实时管道合成程序,该程序显式地考虑了时变的不确定障碍物,并提供了形式化的概率安全保证。STT被公式化为状态空间中一个时变的球,其中心和半径根据不确定的传感信息在线演变。我们推导出一个闭式、无近似的控制律,将系统轨迹限制在管道内,确保概率安全和任务完成。我们的方法为概率避障和有限时间任务完成提供了形式化保证。由此产生的控制器是无模型的、无近似的、无优化的,从而能够实现高效的实时执行,同时保证收敛到目标。通过在杂乱和不确定环境中移动机器人、无人机和7自由度机械臂上的仿真研究和硬件实验,证明了该框架的有效性和可扩展性。
🔬 方法详解
问题定义:论文旨在解决在具有不确定障碍物的动态环境中,机器人如何安全且可靠地完成概率时序可达-避障-停留(PrT-RAS)任务。现有方法通常难以同时保证概率安全性和任务完成,尤其是在障碍物具有不确定性的情况下。这些方法可能需要大量的计算资源进行优化,或者依赖于对环境的精确建模,这在实际应用中往往是不现实的。
核心思路:论文的核心思路是利用时空管道(STT)的概念,将机器人的运动轨迹约束在一个随时间变化的“管道”内。通过动态调整管道的中心和半径,可以适应不确定的环境变化,并保证机器人始终处于安全区域内。这种方法避免了复杂的优化过程,并允许实时控制。
技术框架:该框架主要包含以下几个阶段:1) 基于不确定传感信息,在线估计障碍物的状态和运动轨迹。2) 根据障碍物信息,动态调整时空管道的中心和半径,确保管道始终位于安全区域内。3) 设计一个闭式控制律,将机器人的实际轨迹约束在时空管道内,保证概率安全性和任务完成。整个过程无需模型,无需优化,直接通过解析计算得到控制量。
关键创新:该论文的关键创新在于提出了一种实时、无近似、无优化的时空管道合成方法,能够显式地考虑时变的不确定障碍物,并提供形式化的概率安全保证。与现有方法相比,该方法不需要对环境进行精确建模,也不需要进行复杂的优化计算,从而能够实现高效的实时控制。此外,该方法还提供了一种闭式控制律,可以直接将机器人的轨迹约束在时空管道内。
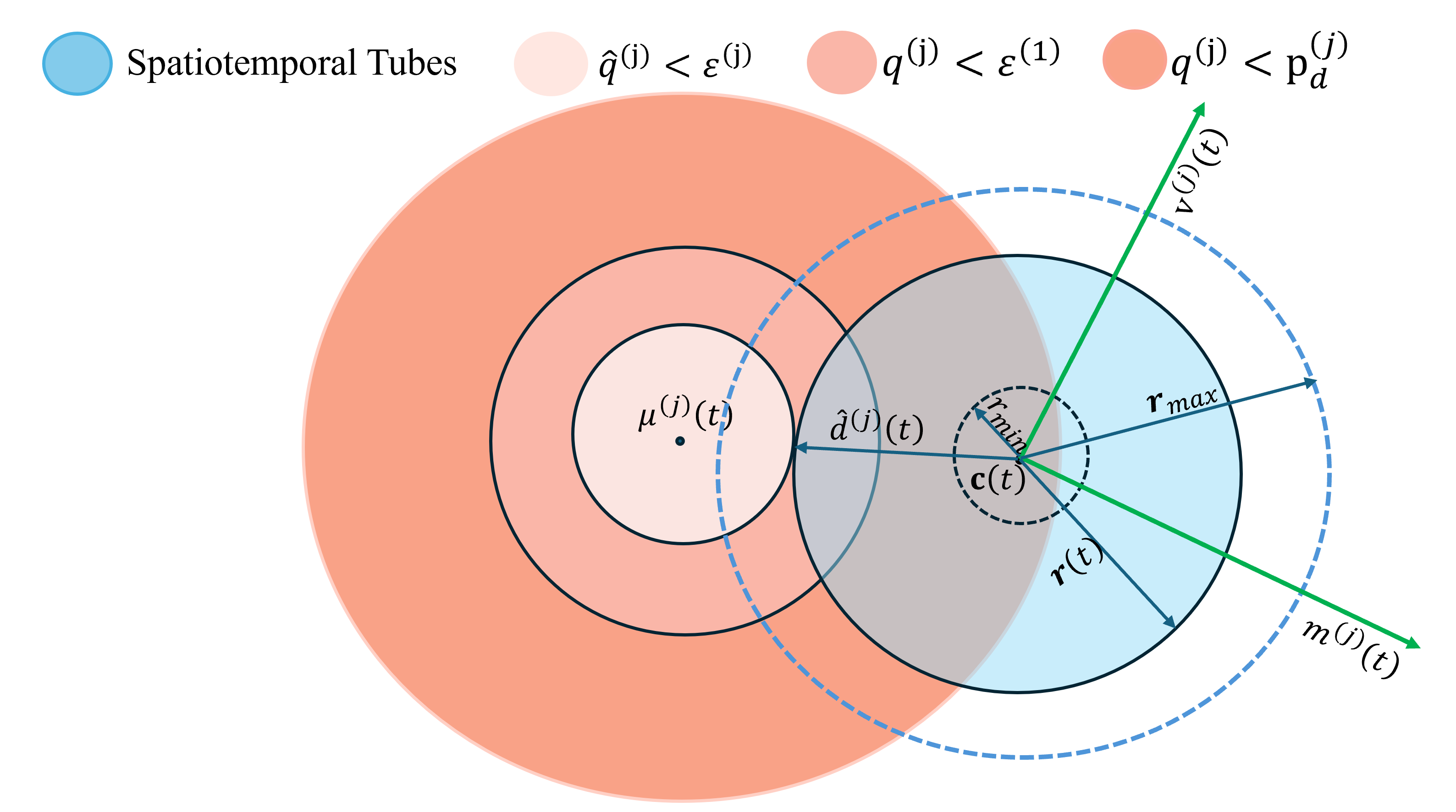
关键设计:时空管道被定义为状态空间中一个时变的球,其中心和半径根据不确定的传感信息在线演变。控制律的设计目标是最小化机器人状态与管道中心之间的距离,同时保证机器人始终位于管道内。论文推导出一个闭式解,避免了近似和优化。具体的参数设置取决于具体的机器人和环境,但核心思想是根据障碍物的不确定性动态调整管道的半径,以保证概率安全。
🖼️ 关键图片
📊 实验亮点
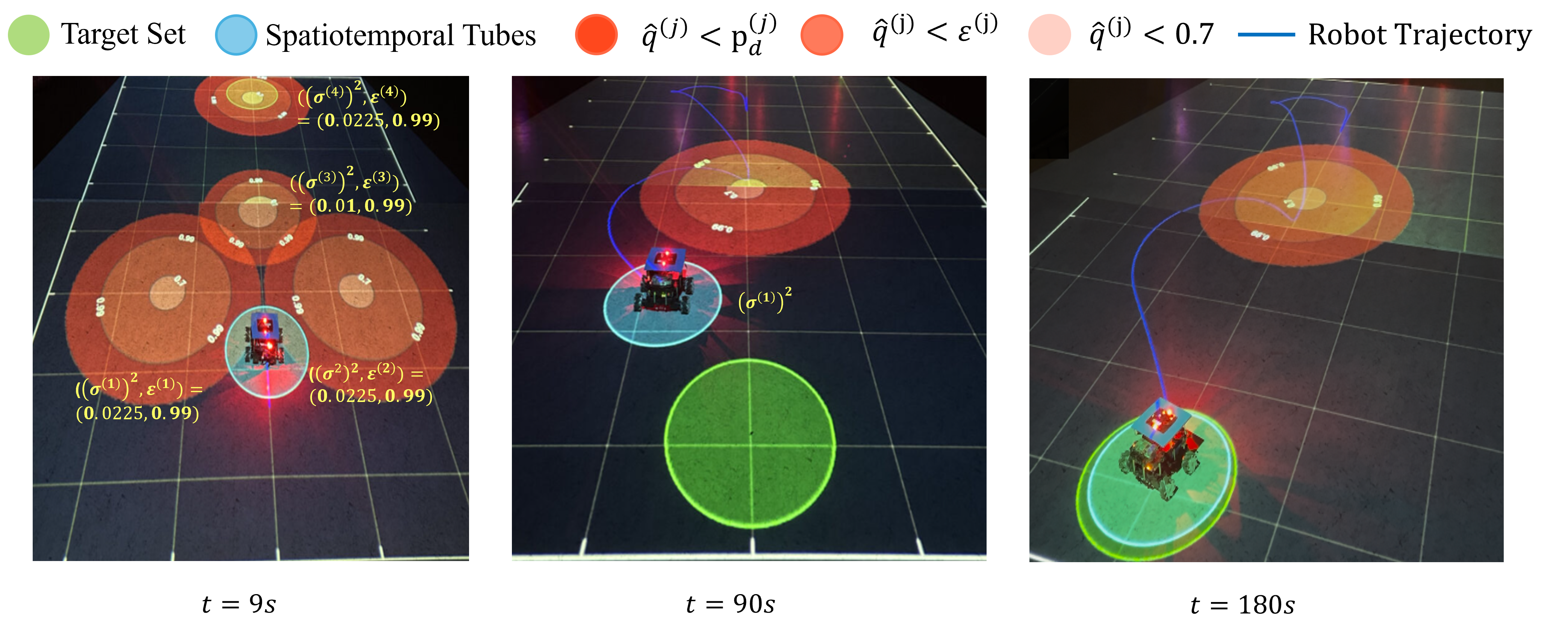
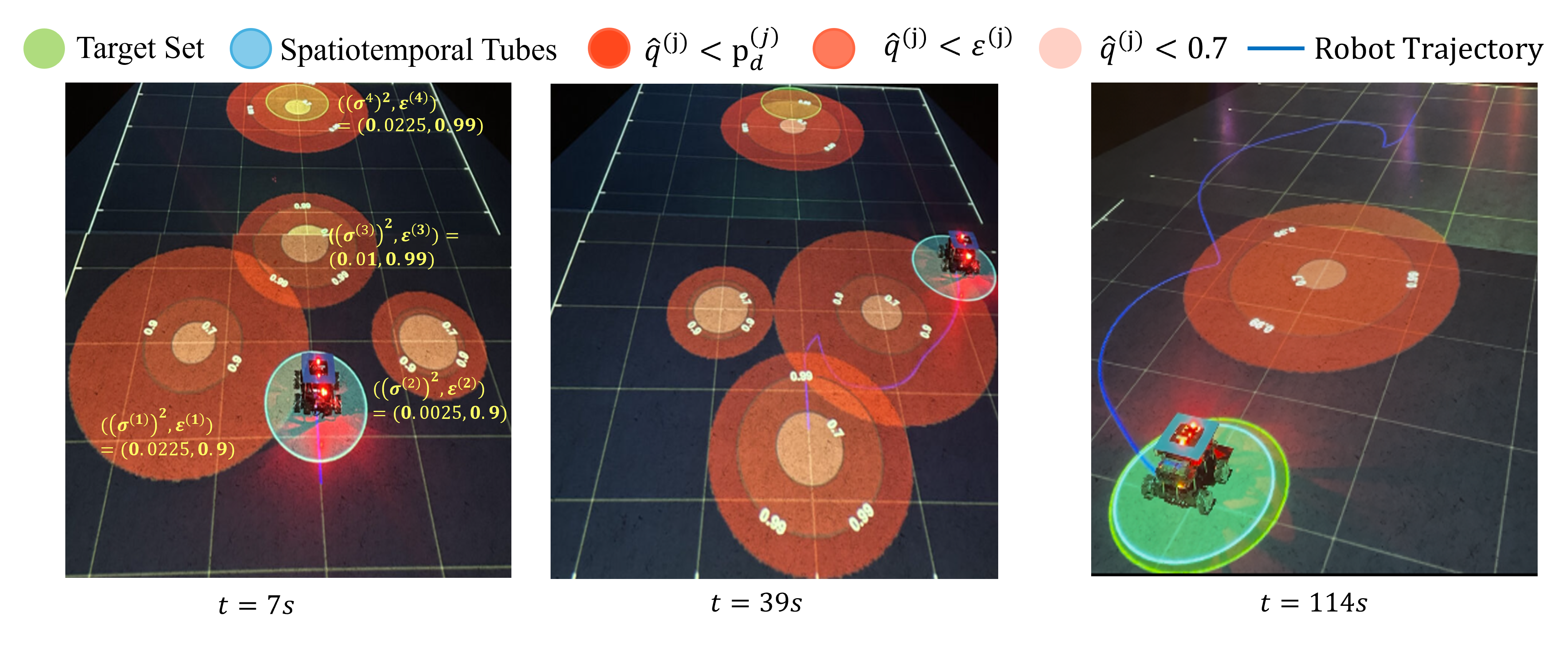
通过仿真和硬件实验,验证了该方法在移动机器人、无人机和7自由度机械臂上的有效性。实验结果表明,该方法能够在杂乱和不确定的环境中安全地完成任务,并且具有良好的实时性和可扩展性。虽然论文中没有给出具体的性能数据,但强调了该方法在实际应用中的可行性。
🎯 应用场景
该研究成果可广泛应用于机器人导航、无人机飞行、自动驾驶等领域。尤其是在复杂、动态和不确定的环境中,例如仓库物流、灾难救援、自动驾驶车辆避障等,该方法能够提供安全可靠的运动规划和控制,具有重要的实际应用价值和潜在的商业前景。
📄 摘要(原文)
In this work, we extend the Spatiotemporal Tube (STT) framework to address Probabilistic Temporal Reach-Avoid-Stay (PrT-RAS) tasks in dynamic environments with uncertain obstacles. We develop a real-time tube synthesis procedure that explicitly accounts for time-varying uncertain obstacles and provides formal probabilistic safety guarantees. The STT is formulated as a time-varying ball in the state space whose center and radius evolve online based on uncertain sensory information. We derive a closed-form, approximation-free control law that confines the system trajectory within the tube, ensuring both probabilistic safety and task satisfaction. Our method offers a formal guarantee for probabilistic avoidance and finite-time task completion. The resulting controller is model-free, approximation-free, and optimization-free, enabling efficient real-time execution while guaranteeing convergence to the target. The effectiveness and scalability of the framework are demonstrated through simulation studies and hardware experiments on mobile robots, a UAV, and a 7-DOF manipulator navigating in cluttered and uncertain environments.