Energy-Efficient Omnidirectional Locomotion for Wheeled Quadrupeds via Predictive Energy-Aware Nominal Gait Selection
作者: Xu Yang, Wei Yang, Kaibo He, Bo Yang, Yanan Sui, Yilin Mo
分类: cs.RO
发布日期: 2025-12-23
备注: Published in IEEE IROS 2025
期刊: In 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, 2025, pp. 18919-18925
DOI: 10.1109/IROS60139.2025.11246912
💡 一句话要点
提出基于预测能量感知的名义步态选择方法,提升轮腿式四足机器人全向运动能效。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 轮腿式机器人 能量效率 步态规划 强化学习 预测控制 全向运动
📋 核心要点
- 轮腿式机器人虽然结合了轮子的效率和腿的通用性,但在复杂环境中导航时面临着显著的能量优化挑战。
- 该论文提出了一种分层控制框架,通过预测能量消耗来选择最优步态,并使用强化学习进行残差调整,从而优化能量效率。
- 实验结果表明,该方法与固定步态方法相比,能耗降低高达35%,同时保持了相当的速度跟踪性能,并在真实机器人上验证了其鲁棒性。
📝 摘要(中文)
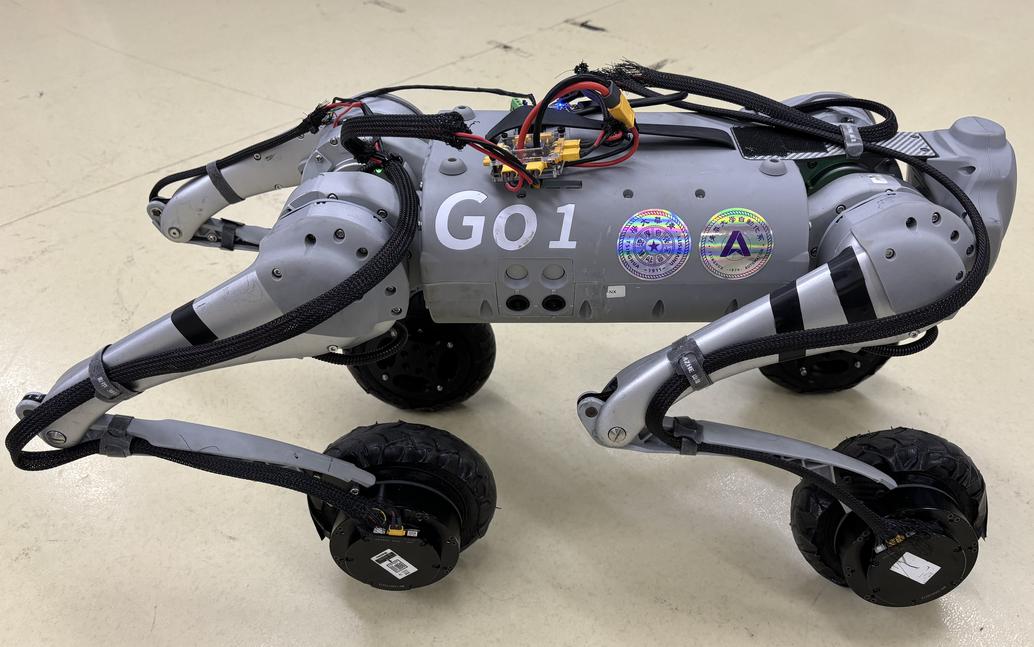
本文提出了一种分层控制框架,该框架结合了预测能量建模和残差强化学习,旨在优化轮腿式四足机器人在各种环境中的全向运动效率。该方法采用了一种新颖的功率预测网络,用于预测不同步态模式在1秒时间范围内的能量消耗,从而能够智能地选择最具能量效率的名义步态。然后,强化学习策略生成对此名义步态的残差调整,从而微调机器人的动作,以平衡能量效率和性能目标。对比分析表明,与固定步态方法相比,该方法可将能耗降低高达35%,同时保持相当的速度跟踪性能。通过在改进的宇树Go1平台上进行的大量仿真和实际实验验证了该框架,证明了即使在外部干扰下也能保持稳健的性能。相关视频和实施细节可在https://sites.google.com/view/switching-wpg 找到。
🔬 方法详解
问题定义:轮腿式四足机器人在复杂地形上实现高效全向运动是一个挑战。现有方法通常采用固定的步态模式,无法根据环境和任务动态调整,导致能量效率低下。此外,准确预测不同步态的能量消耗也是一个难题。
核心思路:该论文的核心思路是利用预测模型来估计不同步态的能量消耗,并选择能量消耗最低的步态作为名义步态。然后,通过强化学习对名义步态进行微调,以实现性能和能效之间的平衡。这种方法允许机器人根据环境和任务动态调整步态,从而提高整体能量效率。
技术框架:该框架包含两个主要模块:功率预测网络和残差强化学习策略。功率预测网络预测不同步态在未来一段时间内的能量消耗。基于预测结果,选择能量消耗最低的步态作为名义步态。然后,强化学习策略生成残差调整,对名义步态进行微调,以满足特定的性能目标,例如速度跟踪。整个框架采用分层控制结构,实现了能量效率和性能的优化。
关键创新:该论文的关键创新在于将预测能量建模与残差强化学习相结合,用于优化轮腿式四足机器人的全向运动。传统的步态规划方法通常基于启发式规则或优化算法,难以适应复杂环境。该方法通过学习不同步态的能量消耗模型,并利用强化学习进行自适应调整,实现了更高效的运动控制。
关键设计:功率预测网络采用时间卷积网络(TCN)结构,输入为机器人的状态和动作序列,输出为未来一段时间内的能量消耗预测。强化学习策略采用Actor-Critic算法,Actor网络生成残差调整,Critic网络评估当前策略的性能。损失函数包括能量消耗项和性能指标项,例如速度跟踪误差。通过调整损失函数的权重,可以平衡能量效率和性能。
🖼️ 关键图片

📊 实验亮点
实验结果表明,与固定步态方法相比,该方法可将能耗降低高达35%,同时保持相当的速度跟踪性能。在真实机器人(宇树Go1)上的实验验证了该方法的鲁棒性,即使在外部干扰下也能保持稳定的运动控制。这些结果表明,该方法在实际应用中具有很大的潜力。
🎯 应用场景
该研究成果可应用于物流、巡检、搜救等领域。轮腿式机器人能够在复杂地形上高效移动,降低能源消耗,延长续航时间,提高任务完成效率。此外,该方法还可以推广到其他类型的机器人,例如人形机器人和多足机器人,为机器人运动控制提供新的思路。
📄 摘要(原文)
Wheeled-legged robots combine the efficiency of wheels with the versatility of legs, but face significant energy optimization challenges when navigating diverse environments. In this work, we present a hierarchical control framework that integrates predictive power modeling with residual reinforcement learning to optimize omnidirectional locomotion efficiency for wheeled quadrupedal robots. Our approach employs a novel power prediction network that forecasts energy consumption across different gait patterns over a 1-second horizon, enabling intelligent selection of the most energy-efficient nominal gait. A reinforcement learning policy then generates residual adjustments to this nominal gait, fine-tuning the robot's actions to balance energy efficiency with performance objectives. Comparative analysis shows our method reduces energy consumption by up to 35\% compared to fixed-gait approaches while maintaining comparable velocity tracking performance. We validate our framework through extensive simulations and real-world experiments on a modified Unitree Go1 platform, demonstrating robust performance even under external disturbances. Videos and implementation details are available at \href{https://sites.google.com/view/switching-wpg}{https://sites.google.com/view/switching-wpg}.