Collaborative Continuum Robots: A Survey
作者: Xinyu Li, Qian Tang, Guoxin Yin, Gang Zheng, Jessica Burgner-Kahrs, Cesare Stefanini, Ke Wu
分类: cs.RO
发布日期: 2025-12-22
💡 一句话要点
综述协作式连续体机器人,提升任务适应性、工作空间和负载能力。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 连续体机器人 协作机器人 运动规划 建模 控制
📋 核心要点
- 现有连续体机器人协作研究在任务适应性、工作空间和负载能力方面存在局限性,难以满足复杂任务需求。
- 本文对协作式连续体机器人进行分类,并从结构设计、建模、运动规划和控制等方面进行系统性综述。
- 该综述总结了当前协作式连续体机器人面临的挑战,并展望了未来发展机遇,为相关研究提供参考。
📝 摘要(中文)
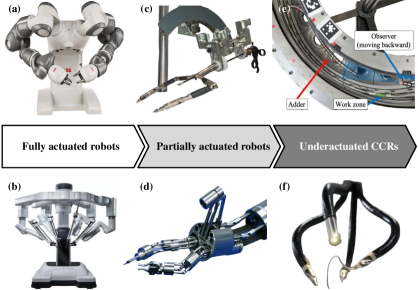
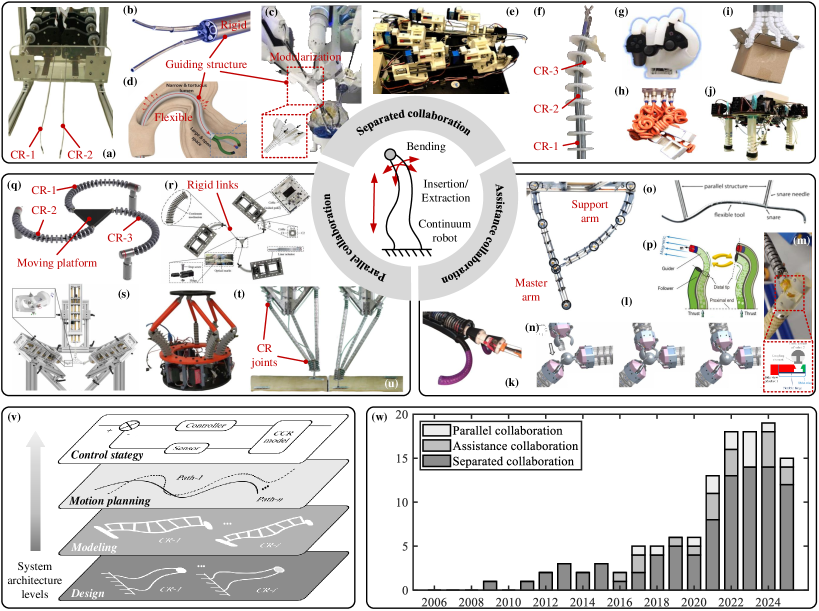
连续体机器人(CRs)因其紧凑的结构、固有的柔顺性和灵活的变形能力,已被广泛应用于各个领域。通过协调多个CRs形成协作式连续体机器人(CCRs),可以进一步提高任务适应性、工作空间、灵活性、负载能力和操作稳定性,从而提供显著的优势。近年来,连续体机器人领域对这一新兴领域的兴趣稳步增长,相关出版物的数量也在持续增加。本综述通过对不同系统架构层面的最新进展进行全面概述,为CCRs的研究提供了一个清晰的框架。首先,CCRs被分为分离协作、辅助协作和平行协作三种协作模式,并给出了定义。接下来,系统地总结了每种模式在结构设计、建模、运动规划和控制方面的进展。最后,讨论了CCRs当前面临的挑战和未来的机遇。
🔬 方法详解
问题定义:现有连续体机器人(CRs)在单独工作时,其任务适应性、工作空间、灵活性和负载能力受到限制,难以满足复杂环境下的操作需求。协作式连续体机器人(CCRs)旨在通过多个CRs之间的协同工作来克服这些限制,但缺乏系统性的研究框架和技术总结。
核心思路:本文的核心思路是对CCRs进行分类,并针对每种类型的CCRs,从结构设计、建模、运动规划和控制四个关键方面进行综述,从而为CCRs的研究提供一个清晰的框架。通过对现有研究的总结和分析,指出CCRs当前面临的挑战和未来的机遇。
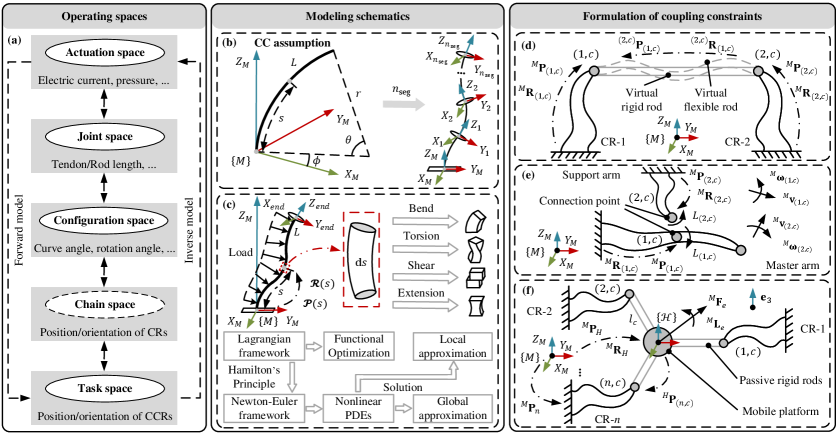
技术框架:本文首先将CCRs分为三种协作模式:分离协作、辅助协作和平行协作。然后,针对每种协作模式,分别从以下四个方面进行综述: 1. 结构设计:讨论不同协作模式下CRs的结构设计特点。 2. 建模:总结不同建模方法在CCRs中的应用。 3. 运动规划:分析不同运动规划算法在CCRs中的适用性。 4. 控制:综述不同控制策略在CCRs中的应用。 最后,讨论CCRs当前面临的挑战和未来的机遇。
关键创新:本文的创新之处在于对CCRs进行了系统性的分类和综述,并从结构设计、建模、运动规划和控制四个关键方面进行了深入分析。此外,本文还指出了CCRs当前面临的挑战和未来的机遇,为相关研究提供了新的思路和方向。
关键设计:本文主要是一篇综述文章,没有涉及具体的参数设置、损失函数或网络结构等技术细节。其关键在于对现有文献的整理和分析,并从中提取出有价值的信息和结论。例如,在结构设计方面,需要考虑不同协作模式下CRs的连接方式和运动范围;在建模方面,需要选择合适的模型来描述CRs的运动学和动力学特性;在运动规划方面,需要设计高效的算法来规划CRs的运动轨迹;在控制方面,需要设计鲁棒的控制器来保证CRs的运动精度。
🖼️ 关键图片
📊 实验亮点
该综述全面总结了协作式连续体机器人的研究进展,涵盖了结构设计、建模、运动规划和控制等关键方面。通过对不同协作模式的分类和分析,为研究人员提供了一个清晰的框架,有助于推动该领域的发展。此外,该综述还指出了当前面临的挑战和未来的机遇,为未来的研究方向提供了参考。
🎯 应用场景
协作式连续体机器人有望在医疗手术、工业检测、灾难救援等领域发挥重要作用。例如,在微创手术中,多个连续体机器人可以协同完成复杂的组织切除和缝合任务;在工业检测中,可以用于狭小空间的管道检测和维修;在灾难救援中,可以用于搜索和营救被困人员。未来,随着技术的不断发展,CCRs的应用前景将更加广阔。
📄 摘要(原文)
Continuum robots (CRs), owing to their compact structure, inherent compliance, and flexible deformation, have been widely applied in various fields. By coordinating multiple CRs to form collaborative continuum robots (CCRs), task adaptability, workspace, flexibility, load capacity, and operational stability can be further improved, thus offering significant advantages. In recent years, interest in this emerging field has grown steadily within the continuum-robotics community, accompanied by a consistent rise in related publications. By presenting a comprehensive overview of recent progress from different system-architecture levels, this survey provides a clear framework for research on CCRs. First, CCRs are classified into the three collaboration modes of separated collaboration, assistance collaboration, and parallel collaboration, with definitions provided. Next, advances in structural design, modeling, motion planning, and control for each mode are systematically summarized. Finally, current challenges and future opportunities for CCRs are discussed.