Deterministic Reconstruction of Tennis Serve Mechanics: From Aerodynamic Constraints to Internal Torques via Rigid-Body Dynamics
作者: Sun-Hyun Youn
分类: physics.app-ph, cs.RO
发布日期: 2025-12-20
备注: 9 figures
💡 一句话要点
提出基于刚体动力学的网球发球力学确定性重建方法,从空气动力学约束推导内部扭矩。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 网球发球 生物力学 刚体动力学 逆动力学 轨迹优化
📋 核心要点
- 现有网球发球生物力学研究缺乏对精英球员动作背后物理机制的解释,多依赖现象学观察或统计分析。
- 该论文提出一种基于刚体动力学的确定性方法,通过轨迹优化和逆动力学分析,从空气动力学约束推导内部扭矩。
- 研究揭示了不同发球类型在运动学相似的情况下,其内部动力学曲线存在显著差异,强调了“静止”关节处扭矩的重要性。
📝 摘要(中文)
大多数关于网球发球生物力学的传统研究依赖于现象学观察,比较专业和业余球员,或者最近依赖于人工智能驱动的运动数据统计分析。虽然这些方法能够有效地描述精英球员的 extit{行为方式},但往往无法从力学角度解释这些运动在物理上 extit{为什么}是必要的。本文提出了一种基于物理的确定性方法,用于研究网球发球,该方法使用人体上身的12自由度多段模型。我们没有将模型拟合到运动捕捉数据,而是通过轨迹优化解决逆运动学问题,以严格满足平击、侧旋和上旋发球所需的空气动力学边界条件。随后,我们基于虚功率原理进行逆动力学分析,以计算净关节扭矩。仿真结果表明,虽然不同发球的运动轨迹可能具有视觉相似性,但潜在的动力学曲线差异很大。一个关键发现是,表现出最小角位移的关节(运动学上的“静止”阶段),尤其是在手腕处,需要大量且高度时变的扭矩来抵消重力载荷和动态耦合效应。通过阐明可见运动学和内部动力学之间的分离,本研究提供了一个第一性原理框架,用于理解网球发球的力学原理,超越了对精英技术的简单模仿。
🔬 方法详解
问题定义:现有网球发球生物力学研究主要集中在描述精英球员的动作特征,缺乏对这些动作背后物理机制的深入理解。现有方法,如现象学观察和统计分析,无法解释为什么这些特定的动作是物理上必要的,以及内部关节如何产生所需的力和扭矩。
核心思路:该论文的核心思路是通过建立一个基于物理的确定性模型,从空气动力学约束出发,推导出网球发球过程中所需的内部关节扭矩。通过这种方式,可以理解不同发球类型(如平击、侧旋和上旋)在运动学上的相似性与动力学上的差异。
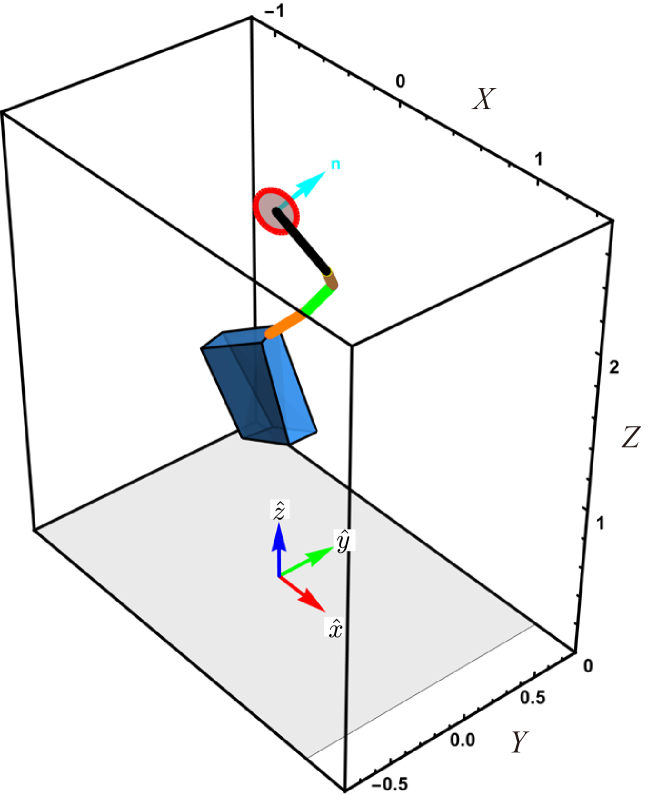
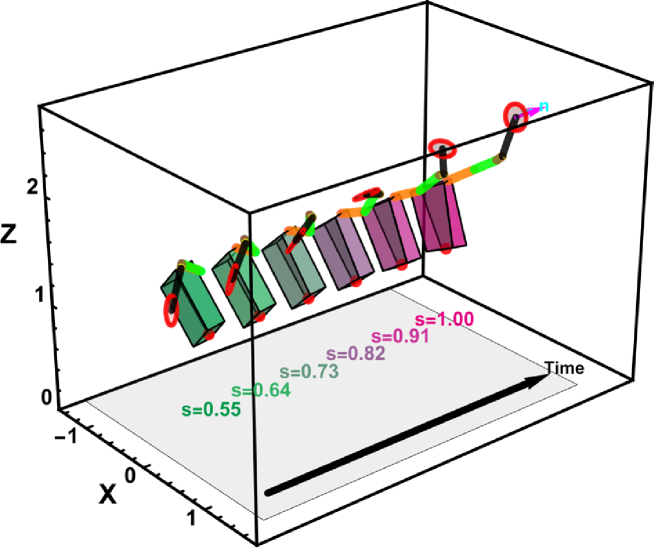
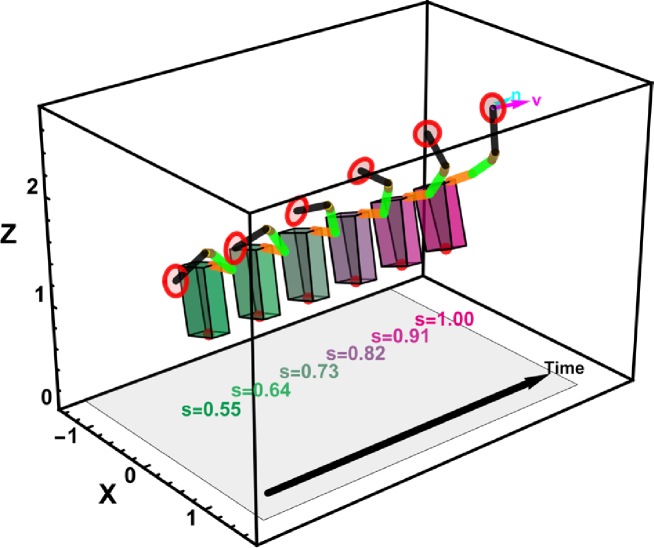
技术框架:该方法主要包含以下几个阶段:1) 建立人体上身的12自由度多段刚体模型;2) 通过轨迹优化解决逆运动学问题,确保模型运动轨迹满足不同发球类型的空气动力学边界条件;3) 基于虚功率原理进行逆动力学分析,计算各个关节的净扭矩。
关键创新:该方法最重要的创新在于其确定性,即从空气动力学约束出发,通过物理模型推导出内部动力学,而不是简单地拟合运动捕捉数据。这种方法能够揭示运动学和动力学之间的复杂关系,特别是那些在运动学上看似“静止”的关节,实际上需要产生很大的扭矩来维持运动。
关键设计:该方法的关键设计包括:1) 精确的空气动力学模型,用于描述网球在不同旋转下的受力情况;2) 轨迹优化算法,用于寻找满足空气动力学约束的最优运动轨迹;3) 基于虚功率原理的逆动力学分析,用于准确计算关节扭矩。具体的参数设置和损失函数在论文中应该有详细描述(未知)。
🖼️ 关键图片
📊 实验亮点
研究发现,虽然不同发球类型的运动轨迹在视觉上可能相似,但其内部动力学曲线差异显著。尤其值得注意的是,在运动学上看似“静止”的关节,如手腕,需要产生大量且高度时变的扭矩来抵消重力载荷和动态耦合效应。这些发现挑战了传统上对网球发球力学的认知。
🎯 应用场景
该研究成果可应用于网球教练领域,帮助教练员更深入地理解不同发球技术的力学原理,从而制定更有效的训练计划。此外,该方法还可以推广到其他运动项目的生物力学分析,例如棒球投球、高尔夫挥杆等,为运动员提供更科学的运动指导。
📄 摘要(原文)
Most conventional studies on tennis serve biomechanics rely on phenomenological observations comparing professional and amateur players or, more recently, on AI-driven statistical analyses of motion data. While effective at describing \textit{what} elite players do, these approaches often fail to explain \textit{why} such motions are physically necessary from a mechanistic perspective. This paper proposes a deterministic, physics-based approach to the tennis serve using a 12-degree-of-freedom multi-segment model of the human upper body. Rather than fitting the model to motion capture data, we solve the inverse kinematics problem via trajectory optimization to rigorously satisfy the aerodynamic boundary conditions required for Flat, Slice, and Kick serves. We subsequently perform an inverse dynamics analysis based on the Principle of Virtual Power to compute the net joint torques. The simulation results reveal that while the kinematic trajectories for different serves may share visual similarities, the underlying kinetic profiles differ drastically. A critical finding is that joints exhibiting minimal angular displacement (kinematically ``quiet'' phases), particularly at the wrist, require substantial and highly time-varying torques to counteract gravitational loading and dynamic coupling effects. By elucidating the dissociation between visible kinematics and internal kinetics, this study provides a first-principles framework for understanding the mechanics of the tennis serve, moving beyond simple imitation of elite techniques.