CaFe-TeleVision: A Coarse-to-Fine Teleoperation System with Immersive Situated Visualization for Enhanced Ergonomics
作者: Zixin Tang, Yiming Chen, Quentin Rouxel, Dianxi Li, Shuang Wu, Fei Chen
分类: cs.RO
发布日期: 2025-12-16 (更新: 2025-12-17)
备注: Project webpage: https://clover-cuhk.github.io/cafe_television/ Code: https://github.com/Zixin-Tang/CaFe-TeleVision
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出CaFe-TeleVision遥操作系统,通过粗细粒度控制和沉浸式可视化提升人机工效。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 遥操作 人机工效 粗细粒度控制 沉浸式可视化 协作机器人
📋 核心要点
- 现有遥操作系统在效率和人机工效方面存在局限性,尤其是在复杂场景下,需要更高效舒适的控制方案。
- CaFe-TeleVision采用粗细粒度控制机制,弥合工作空间差异,并集成按需情境可视化技术,降低认知负荷。
- 实验结果表明,CaFe-TeleVision显著提升了人机工效,成功率提升高达28.89%,完成时间加快26.81%。
📝 摘要(中文)
本文提出了一种名为CaFe-TeleVision的粗细粒度遥操作系统,该系统具有沉浸式情境可视化功能,旨在提高人机工效。系统的核心在于重定向模块中采用的粗细粒度控制机制,用于弥合工作空间差异,从而共同优化效率和物理人机工效。为了提供具有足够视觉线索的沉浸式反馈,感知模块集成了按需情境可视化技术,从而降低了多视图处理的认知负荷。该系统构建在人形协作机器人之上,并通过六项具有挑战性的双手操作任务进行了验证。对24名参与者进行的用户研究证实,CaFe-TeleVision在统计学意义上显著提高了人机工效,表明在遥操作过程中任务负荷更低,用户接受度更高。定量结果还验证了该系统在六项任务中的卓越性能,在成功率方面超过了比较方法高达28.89%,在完成时间方面加快了26.81%。项目网页:https://clover-cuhk.github.io/cafe_television/
🔬 方法详解
问题定义:现有遥操作系统在处理工作空间差异时,效率和人机工效难以兼顾。操作员需要处理多个视角的信息,认知负荷高,长时间操作容易疲劳。因此,需要一种能够有效弥合工作空间差异,并提供直观反馈的遥操作系统。
核心思路:CaFe-TeleVision的核心思路是采用粗细粒度控制机制,先进行粗略的全局调整,再进行精细的局部操作,从而提高操作效率和精度。同时,通过按需情境可视化技术,将关键信息以直观的方式呈现给操作员,降低认知负荷。
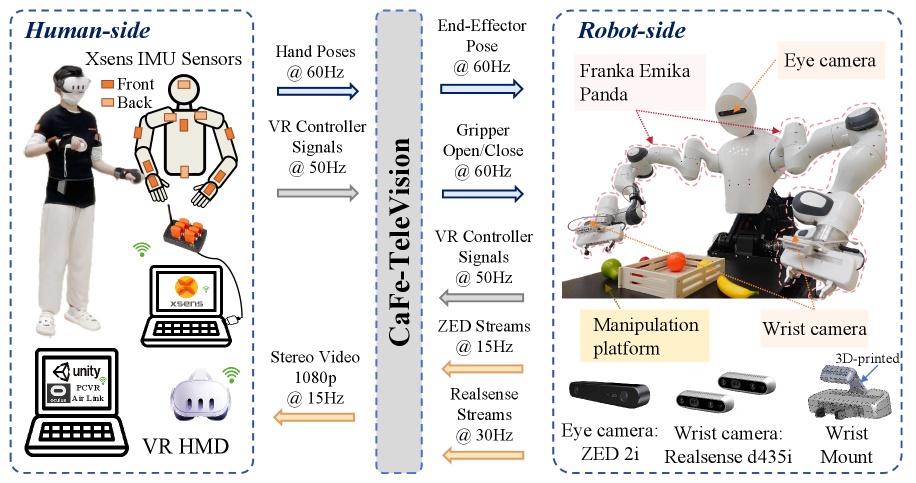
技术框架:CaFe-TeleVision系统主要包含两个模块:重定向模块和感知模块。重定向模块负责将操作员的动作映射到机器人上,采用粗细粒度控制机制。感知模块负责收集机器人周围环境的信息,并通过按需情境可视化技术将信息呈现给操作员。整个系统构建在人形协作机器人之上。
关键创新:该论文的关键创新在于粗细粒度控制机制和按需情境可视化技术。粗细粒度控制机制能够有效弥合工作空间差异,提高操作效率和精度。按需情境可视化技术能够根据操作员的需求,动态调整可视化内容,降低认知负荷。与现有方法相比,CaFe-TeleVision能够更好地兼顾效率和人机工效。
关键设计:粗细粒度控制机制的具体实现方式未知,但可以推测可能涉及到不同尺度的运动规划和控制算法。按需情境可视化技术的具体实现方式也未知,但可以推测可能涉及到视点选择、信息融合和渲染等技术。
🖼️ 关键图片


📊 实验亮点
用户研究表明,CaFe-TeleVision在统计学意义上显著提高了人机工效,降低了任务负荷,提高了用户接受度。定量结果显示,CaFe-TeleVision在六项任务中的成功率超过了比较方法高达28.89%,完成时间加快了26.81%。这些结果表明,CaFe-TeleVision在效率和人机工效方面都具有显著优势。
🎯 应用场景
CaFe-TeleVision系统可应用于危险环境下的远程操作,例如核电站维护、灾难救援等。此外,该系统还可用于医疗手术、太空探索等领域,提高操作精度和安全性,降低操作员的风险和疲劳。
📄 摘要(原文)
Teleoperation presents a promising paradigm for remote control and robot proprioceptive data collection. Despite recent progress, current teleoperation systems still suffer from limitations in efficiency and ergonomics, particularly in challenging scenarios. In this paper, we propose CaFe-TeleVision, a coarse-to-fine teleoperation system with immersive situated visualization for enhanced ergonomics. At its core, a coarse-to-fine control mechanism is proposed in the retargeting module to bridge workspace disparities, jointly optimizing efficiency and physical ergonomics. To stream immersive feedback with adequate visual cues for human vision systems, an on-demand situated visualization technique is integrated in the perception module, which reduces the cognitive load for multi-view processing. The system is built on a humanoid collaborative robot and validated with six challenging bimanual manipulation tasks. User study among 24 participants confirms that CaFe-TeleVision enhances ergonomics with statistical significance, indicating a lower task load and a higher user acceptance during teleoperation. Quantitative results also validate the superior performance of our system across six tasks, surpassing comparative methods by up to 28.89% in success rate and accelerating by 26.81% in completion time. Project webpage: https://clover-cuhk.github.io/cafe_television/