NL2SpaTiaL: Generating Geometric Spatio-Temporal Logic Specifications from Natural Language for Manipulation Tasks
作者: Licheng Luo, Yu Xia, Kaier Liang, Mingyu Cai
分类: cs.RO
发布日期: 2025-12-15
💡 一句话要点
提出NL2SpaTiaL数据集和翻译验证框架,用于机器人操作任务中的自然语言到时空逻辑转换。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人操作 时空逻辑 自然语言处理 数据集生成 指令跟随
📋 核心要点
- 现有方法在机器人操作任务中,主要依赖时序逻辑,忽略了物体间的空间关系,导致任务描述不够精确。
- 论文提出NL2SpaTiaL数据集和翻译验证框架,将自然语言指令转换为时空逻辑公式,更准确地描述任务。
- 实验表明,基于SpaTiaL的表示方法,能够为指令跟随提供更可解释、可验证和可组合的基础。
📝 摘要(中文)
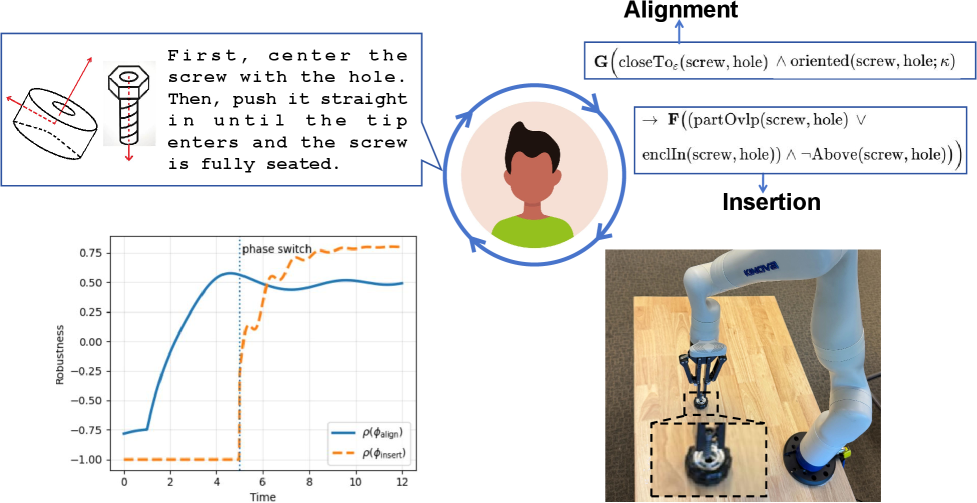
时空逻辑(SpaTiaL)为表达几何空间需求提供了一种原则性的形式化方法,这对于机器人操作至关重要,因为物体位置、邻域关系、姿态约束和交互直接决定了任务的成功。然而,先前的工作主要依赖于标准时序逻辑(TL),它仅对机器人轨迹进行建模,而忽略了对象级别的交互。现有数据集由随机生成的TL公式与自然语言描述配对构建,因此涵盖了时间运算符,但未能表示操作任务所依赖的分层空间关系。为了解决这一差距,我们引入了一个数据集生成框架,该框架合成SpaTiaL规范,并通过确定性的、语义保持的反向翻译过程将其转换为自然语言描述。该流程生成了NL2SpaTiaL数据集,将自然语言与多层次的空间关系和时间目标对齐,以反映操作任务的组合结构。在此基础上,我们提出了一个翻译-验证框架,该框架配备了基于语言的语义检查器,以确保生成的SpaTiaL公式忠实地编码了输入描述所指定的语义。在一系列操作任务上的实验表明,基于SpaTiaL的表示为指令跟随提供了更可解释、可验证和可组合的基础。
🔬 方法详解
问题定义:现有机器人操作任务的指令理解方法,主要依赖于时序逻辑(TL),这种方法侧重于描述机器人自身的轨迹,而忽略了操作任务中至关重要的物体间的空间关系和交互。因此,现有的自然语言到逻辑公式的转换数据集,也无法很好地覆盖操作任务中复杂的空间关系,导致模型难以准确理解指令。
核心思路:论文的核心思路是引入时空逻辑(SpaTiaL)来描述机器人操作任务,SpaTiaL能够更精确地表达物体的位置、邻域关系、姿态约束等空间信息。通过构建一个从自然语言到SpaTiaL公式的转换模型,可以更准确地理解和执行操作任务的指令。同时,为了解决缺乏相关训练数据的问题,论文提出了一个数据集生成框架。
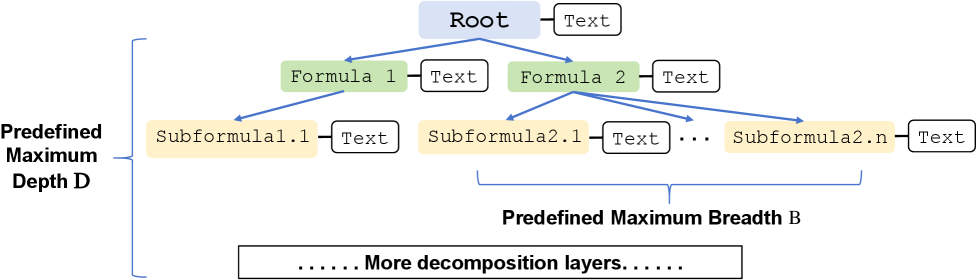
技术框架:论文提出的框架主要包含两个部分:NL2SpaTiaL数据集生成和翻译-验证框架。数据集生成部分,首先合成SpaTiaL公式,然后通过确定性的反向翻译过程将其转换为自然语言描述。翻译-验证框架则包含一个自然语言到SpaTiaL公式的翻译模型,以及一个基于语言的语义检查器,用于验证生成的SpaTiaL公式是否忠实地编码了输入描述的语义。
关键创新:论文的关键创新在于:1) 提出了NL2SpaTiaL数据集,该数据集专门针对机器人操作任务,包含了丰富的空间关系和时间目标;2) 提出了一个翻译-验证框架,该框架能够确保生成的SpaTiaL公式的语义正确性。与现有方法相比,该方法能够更准确地理解和执行操作任务的指令。
关键设计:数据集生成过程中,SpaTiaL公式的合成采用随机生成的方式,并控制公式的复杂度。反向翻译过程采用确定性的规则,以保证语义的准确性。翻译-验证框架中的语义检查器,基于预定义的规则和模板,对生成的SpaTiaL公式进行语义验证。具体的模型结构和损失函数等技术细节在论文中未详细描述,属于未知信息。
🖼️ 关键图片

📊 实验亮点
实验结果表明,基于SpaTiaL的表示方法,能够为指令跟随提供更可解释、可验证和可组合的基础。具体的性能数据、对比基线、提升幅度等信息在摘要中未提及,属于未知信息。但论文强调了SpaTiaL表示在操作任务中的优势。
🎯 应用场景
该研究成果可应用于各种机器人操作任务,例如装配、抓取、放置等。通过将自然语言指令转换为精确的时空逻辑公式,可以提高机器人任务执行的准确性和可靠性。未来,该技术有望应用于更复杂的机器人系统,例如服务机器人、工业机器人等。
📄 摘要(原文)
Spatio-Temporal Logic (SpaTiaL) offers a principled formalism for expressing geometric spatial requirements-an essential component of robotic manipulation, where object locations, neighborhood relations, pose constraints, and interactions directly determine task success. Yet prior works have largely relied on standard temporal logic (TL), which models only robot trajectories and overlooks object-level interactions. Existing datasets built from randomly generated TL formulas paired with natural-language descriptions therefore cover temporal operators but fail to represent the layered spatial relations that manipulation tasks depend on. To address this gap, we introduce a dataset generation framework that synthesizes SpaTiaL specifications and converts them into natural-language descriptions through a deterministic, semantics-preserving back-translation procedure. This pipeline produces the NL2SpaTiaL dataset, aligning natural language with multi-level spatial relations and temporal objectives to reflect the compositional structure of manipulation tasks. Building on this foundation, we propose a translation-verification framework equipped with a language-based semantic checker that ensures the generated SpaTiaL formulas faithfully encode the semantics specified by the input description. Experiments across a suite of manipulation tasks show that SpaTiaL-based representations yield more interpretable, verifiable, and compositional grounding for instruction following. Project website: https://sites.google.com/view/nl2spatial