A Unified Framework for Automated Assembly Sequence and Production Line Planning using Graph-based Optimization
作者: Christoph Hartmann, Marios Demetriades, Kevin Prüfer, Zichen Zhang, Klaus Spindler, Stefan Weltge
分类: cs.RO, cs.MS
发布日期: 2025-12-15
备注: Code available at https://github.com/TUM-utg/PyCAALP (repository will be made public prior to publication)
🔗 代码/项目: GITHUB
💡 一句话要点
提出PyCAALP框架,通过图优化实现自动化装配序列与生产线规划
🎯 匹配领域: 支柱七:动作重定向 (Motion Retargeting)
关键词: 装配序列规划 生产线规划 图优化 混合整数规划 自动化装配 机器人 运动学约束
📋 核心要点
- 现有装配序列规划和生产线规划方法在处理复杂装配时面临组合复杂性高、计算效率低等挑战。
- PyCAALP框架通过图优化建模装配过程,并集成运动学约束和启发式算法,有效降低了搜索空间。
- 该框架采用混合整数规划方法进行生产线规划,并支持工程约束定制,实现了装配序列和生产线规划的灵活权衡。
📝 摘要(中文)
本文提出PyCAALP(基于Python的计算机辅助装配线规划)框架,该框架采用基于图的方法来建模生产模块中的组件和连接,从而实现自动装配序列规划(ASP)和生产线规划(PLP)。该框架集成了运动学边界条件(如潜在的零件碰撞),以保证自动装配规划的可行性。所开发的算法计算所有可行的生产序列,并集成了用于检测空间关系和制定几何约束的模块。该算法还结合了其他属性,包括处理可行性、公差匹配和连接兼容性,以管理装配序列生成中固有的高组合复杂性。诸如单件流装配和几何约束执行等启发式方法被用于进一步细化解空间,从而促进复杂装配的更高效规划。PLP阶段被公式化为混合整数规划(MIP),以平衡固定数量的制造站的总时间。虽然一些复杂度降低技术可能会牺牲最优性,但它们会显著减少MIP的计算时间。此外,该框架支持工程约束的定制,并支持ASP和PLP之间的灵活权衡。该框架的开源性质(可在https://github.com/TUM-utg/PyCAALP 获得)促进了工业和生产研究应用中的进一步协作和采用。
🔬 方法详解
问题定义:论文旨在解决自动化装配序列规划(ASP)和生产线规划(PLP)问题。现有方法在处理复杂装配时,由于组合复杂性高,导致计算量巨大,难以在合理时间内找到最优解。此外,现有方法往往缺乏对运动学约束(如碰撞检测)的有效集成,难以保证规划结果的可行性。
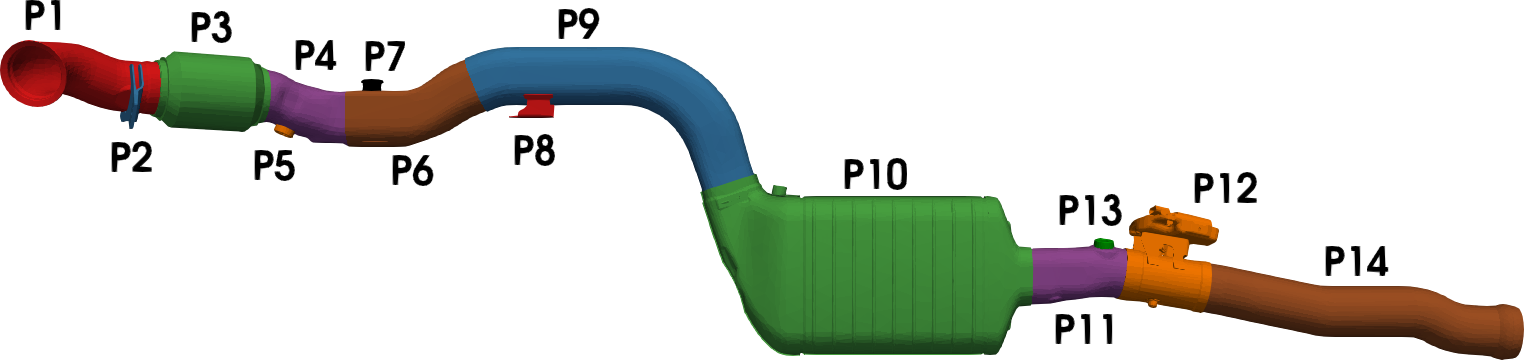
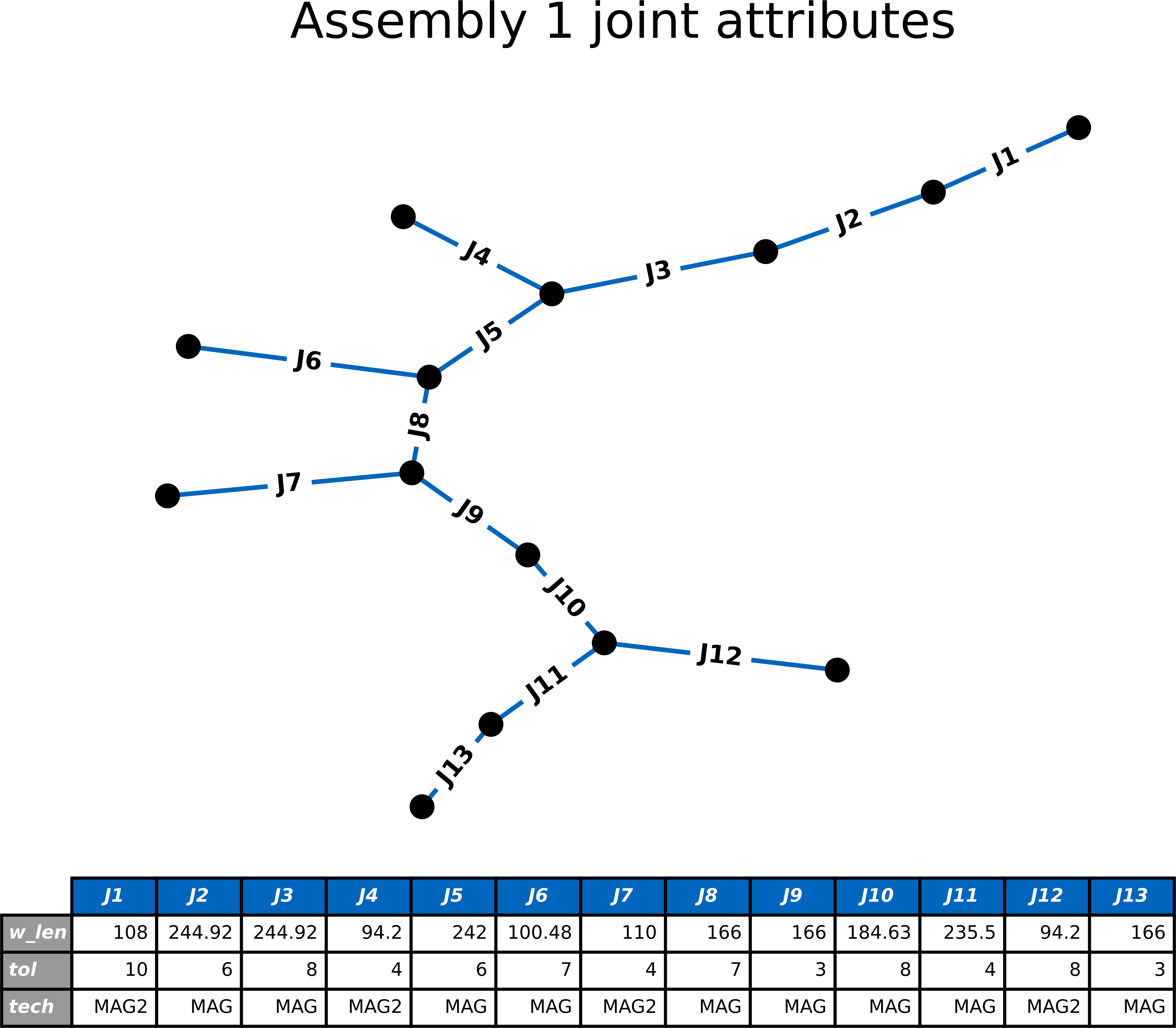
核心思路:论文的核心思路是将装配过程建模为图,其中节点代表组件,边代表连接关系。通过图优化算法,可以在考虑运动学约束和工程约束的前提下,搜索可行的装配序列。同时,采用启发式算法和混合整数规划方法,降低计算复杂度,提高规划效率。
技术框架:PyCAALP框架包含以下主要模块:1) 组件和连接建模模块:使用图结构表示装配体的组件和连接关系。2) 空间关系检测模块:检测组件之间的空间关系,如碰撞、干涉等。3) 几何约束制定模块:根据空间关系制定几何约束,保证装配过程的可行性。4) 装配序列生成模块:基于图优化算法,搜索可行的装配序列。5) 生产线规划模块:采用混合整数规划方法,平衡各制造站的总时间。
关键创新:该论文的关键创新在于:1) 提出了一个统一的框架,同时解决ASP和PLP问题。2) 将运动学约束集成到装配序列规划中,保证了规划结果的可行性。3) 采用启发式算法和混合整数规划方法,有效降低了计算复杂度。4) 框架具有高度的灵活性和可定制性,可以根据不同的工程约束进行调整。
关键设计:在装配序列生成模块中,采用了单件流装配和几何约束执行等启发式方法,以进一步缩小搜索空间。在生产线规划模块中,将问题建模为混合整数规划(MIP),目标是最小化所有制造站的总时间。为了降低MIP的计算时间,采用了一些复杂度降低技术,但可能会牺牲最优性。框架允许用户自定义工程约束,并支持ASP和PLP之间的灵活权衡。
🖼️ 关键图片

📊 实验亮点
论文通过集成运动学约束和采用启发式算法,有效降低了装配序列规划的计算复杂度。虽然文中没有给出具体的性能数据,但强调了复杂度降低技术显著减少了混合整数规划的计算时间。开源框架PyCAALP的发布,为进一步研究和应用提供了便利。
🎯 应用场景
该研究成果可应用于自动化装配线设计、机器人装配规划、智能制造等领域。通过自动生成可行的装配序列和优化生产线布局,可以显著提高生产效率、降低生产成本,并缩短产品上市时间。该框架的开源特性也促进了工业界和学术界的合作与交流,推动装配技术的发展。
📄 摘要(原文)
This paper presents PyCAALP (Python-based Computer-Aided Assembly Line Planning), a framework for automated Assembly Sequence Planning (ASP) and Production Line Planning (PLP), employing a graph-based approach to model components and joints within production modules. The framework integrates kinematic boundary conditions, such as potential part collisions, to guarantee the feasibility of automated assembly planning. The developed algorithm computes all feasible production sequences, integrating modules for detecting spatial relationships and formulating geometric constraints. The algorithm incorporates additional attributes, including handling feasibility, tolerance matching, and joint compatibility, to manage the high combinatorial complexity inherent in assembly sequence generation. Heuristics, such as Single-Piece Flow assembly and geometrical constraint enforcement, are utilized to further refine the solution space, facilitating more efficient planning for complex assemblies. The PLP stage is formulated as a Mixed-Integer Program (MIP), balancing the total times of a fixed number of manufacturing stations. While some complexity reduction techniques may sacrifice optimality, they significantly reduce the MIPs computational time. Furthermore, the framework enables customization of engineering constraints and supports a flexible trade-off between ASP and PLP. The open-source nature of the framework, available at https://github.com/TUM-utg/PyCAALP, promotes further collaboration and adoption in both industrial and production research applications.