START: Traversing Sparse Footholds with Terrain Reconstruction
作者: Ruiqi Yu, Qianshi Wang, Hongyi Li, Zheng Jun, Zhicheng Wang, Jun Wu, Qiuguo Zhu
分类: cs.RO
发布日期: 2025-12-15
💡 一句话要点
START:基于地形重建的稀疏落脚点四足机器人运动
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics) 支柱六:视频提取与匹配 (Video Extraction) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 四足机器人 稀疏地形 地形重建 强化学习 运动控制 零样本迁移 环境感知
📋 核心要点
- 现有四足机器人方法在稀疏地形中泛化性差,或依赖噪声大的高度图,导致学习效率低和步态僵硬。
- START框架利用低成本传感器重建局部地形高度图,显式地表达稀疏落脚点特征,从而提升环境理解和地形评估。
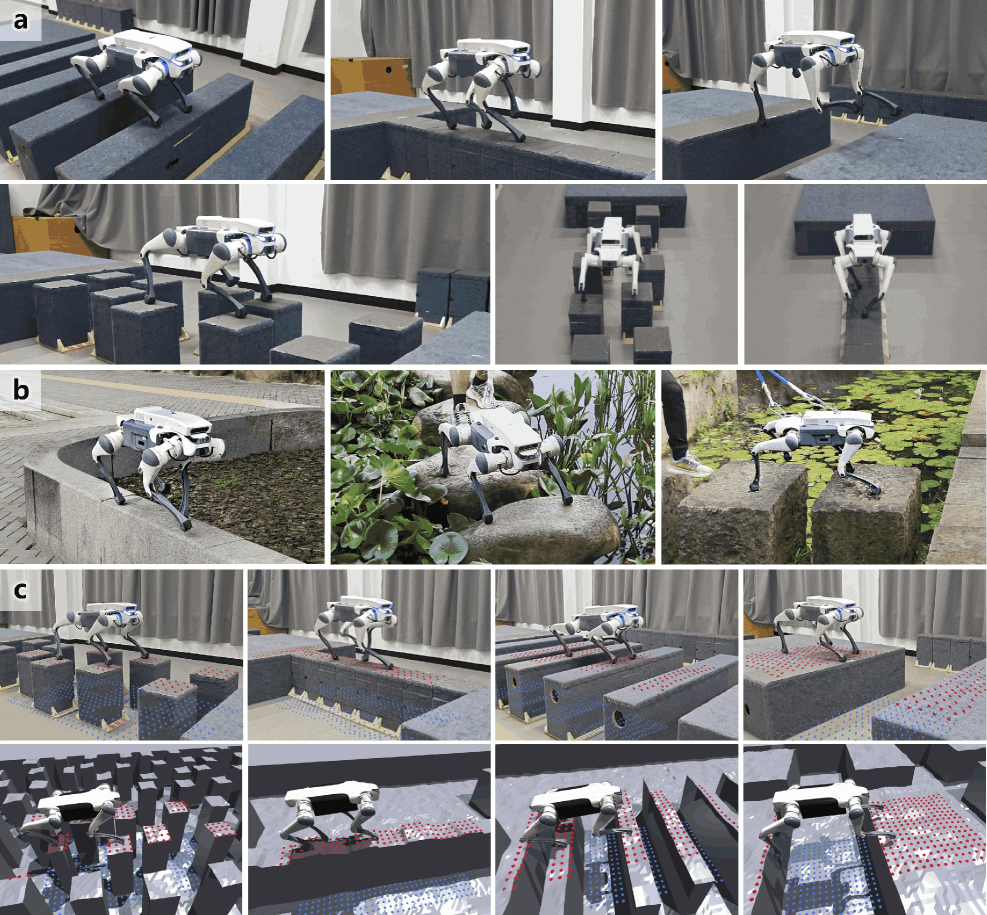
- 实验表明,START在真实场景中实现了零样本迁移,展现了优异的适应性、精确落脚点和鲁棒的运动能力。
📝 摘要(中文)
对于四足机器人而言,在稀疏落脚点的地形上行走是一项充满希望但具有挑战性的任务,它需要精确的环境感知和敏捷的控制,以确保安全的落脚点,同时保持动态稳定性。基于模型的层级控制器在实验室环境中表现出色,但泛化能力有限,行为过于保守。端到端学习方法具有更大的灵活性和适应性,但现有方法依赖于引入噪声和复杂、昂贵流程的高度图,或者从自我中心的深度图像中隐式地推断地形特征,通常会遗漏准确的关键几何线索,导致学习效率低下和步态僵硬。为了克服这些限制,我们提出了START,一个单阶段学习框架,它能够在高度稀疏和随机的落脚点上实现敏捷、稳定的运动。START仅利用低成本的板载视觉和本体感觉来准确地重建局部地形高度图,提供显式的中间表示,以传达与稀疏落脚点区域相关的重要特征。这支持全面的环境理解和精确的地形评估,降低了探索成本并加速了技能获取。实验结果表明,START在各种真实场景中实现了零样本迁移,展示了卓越的适应性、精确的落脚点放置和强大的运动能力。
🔬 方法详解
问题定义:现有四足机器人在稀疏落脚点地形上的运动方法,要么依赖于泛化能力差的基于模型的控制,要么依赖于噪声较大的高度图或隐式地形特征推断,导致学习效率低下和步态僵硬。核心问题是如何在仅使用低成本传感器的情况下,让四足机器人能够安全、稳定、敏捷地通过稀疏且随机的落脚点。
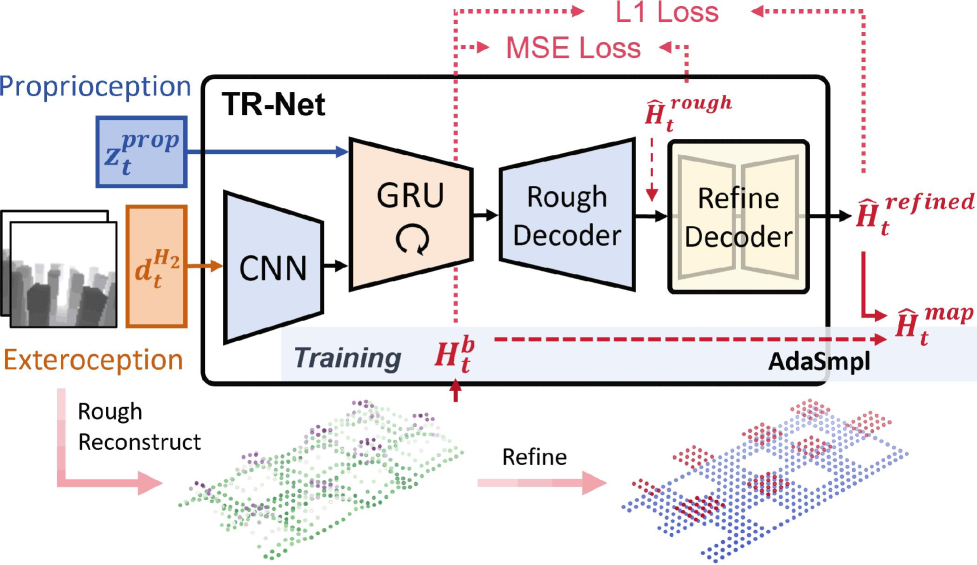
核心思路:START的核心思路是利用低成本的板载视觉和本体感觉信息,显式地重建局部地形的高度图。通过这种显式的中间表示,机器人可以更准确地理解环境,评估地形的安全性,从而做出更合理的落脚点选择和运动规划。这种显式表示避免了隐式推断带来的信息损失,并减少了对大量数据的依赖。
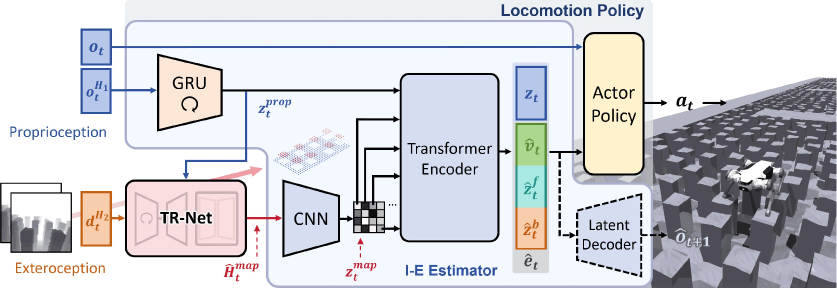
技术框架:START是一个单阶段学习框架,主要包含以下几个模块:1) 感知模块:利用板载视觉和本体感觉数据,估计机器人周围的局部地形高度图。2) 控制模块:基于估计的地形高度图,选择合适的落脚点,并生成相应的运动控制指令。3) 训练模块:通过强化学习训练控制模块,使其能够在各种稀疏落脚点地形上实现稳定、敏捷的运动。整个框架采用端到端的方式进行训练,以优化整体性能。
关键创新:START最重要的创新点在于显式地重建局部地形高度图,并将其作为中间表示用于运动控制。与以往依赖隐式特征推断或噪声高度图的方法相比,START能够更准确地捕捉地形的关键几何信息,从而提高运动的稳定性和效率。此外,单阶段学习框架简化了训练流程,降低了探索成本。
关键设计:在感知模块中,论文可能采用了深度学习模型,例如卷积神经网络(CNN),来从视觉和本体感觉数据中估计地形高度图。损失函数可能包括重建损失(用于确保高度图的准确性)和运动奖励(用于鼓励稳定和敏捷的运动)。控制模块可能采用强化学习算法,例如近端策略优化(PPO),来学习最优的运动策略。具体的网络结构和参数设置未知,需要在论文中查找。
🖼️ 关键图片
📊 实验亮点
START在各种真实场景中实现了零样本迁移,无需针对特定环境进行重新训练。实验结果表明,START能够精确地选择落脚点,并实现稳定、敏捷的运动。具体的性能数据和对比基线未知,需要在论文中查找。
🎯 应用场景
该研究成果可应用于搜救、勘探、物流等领域。四足机器人能够在复杂、崎岖的地形中灵活运动,执行人类难以完成的任务。例如,在灾难现场搜寻幸存者,在矿区进行勘探,或在仓库中进行货物搬运。未来,该技术有望进一步提升四足机器人的自主性和适应性,使其能够更好地服务于人类。
📄 摘要(原文)
Traversing terrains with sparse footholds like legged animals presents a promising yet challenging task for quadruped robots, as it requires precise environmental perception and agile control to secure safe foot placement while maintaining dynamic stability. Model-based hierarchical controllers excel in laboratory settings, but suffer from limited generalization and overly conservative behaviors. End-to-end learning-based approaches unlock greater flexibility and adaptability, but existing state-of-the-art methods either rely on heightmaps that introduce noise and complex, costly pipelines, or implicitly infer terrain features from egocentric depth images, often missing accurate critical geometric cues and leading to inefficient learning and rigid gaits. To overcome these limitations, we propose START, a single-stage learning framework that enables agile, stable locomotion on highly sparse and randomized footholds. START leverages only low-cost onboard vision and proprioception to accurately reconstruct local terrain heightmap, providing an explicit intermediate representation to convey essential features relevant to sparse foothold regions. This supports comprehensive environmental understanding and precise terrain assessment, reducing exploration cost and accelerating skill acquisition. Experimental results demonstrate that START achieves zero-shot transfer across diverse real-world scenarios, showcasing superior adaptability, precise foothold placement, and robust locomotion.