Motion Planning for Safe Landing of a Human-Piloted Parafoil
作者: Maximillian Fainkich, Kiril Solovey, Anna Clarke
分类: cs.RO
发布日期: 2025-12-11
💡 一句话要点
针对人控滑翔伞安全着陆,提出基于改进SST的运动规划算法。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 滑翔伞 运动规划 安全着陆 轨迹优化 SST算法
📋 核心要点
- 现有滑翔伞训练模拟器不足,飞行员依赖经验,导致着陆阶段事故频发,亟需有效的轨迹规划方法。
- 论文改进了Stable Sparse RRT (SST)算法,通过最小化倾斜角来优化轨迹,保证安全性的同时降低控制成本。
- 实验表明,该算法生成的轨迹在成本上优于人类飞行员的轨迹,提升幅度达到20%-80%。
📝 摘要(中文)
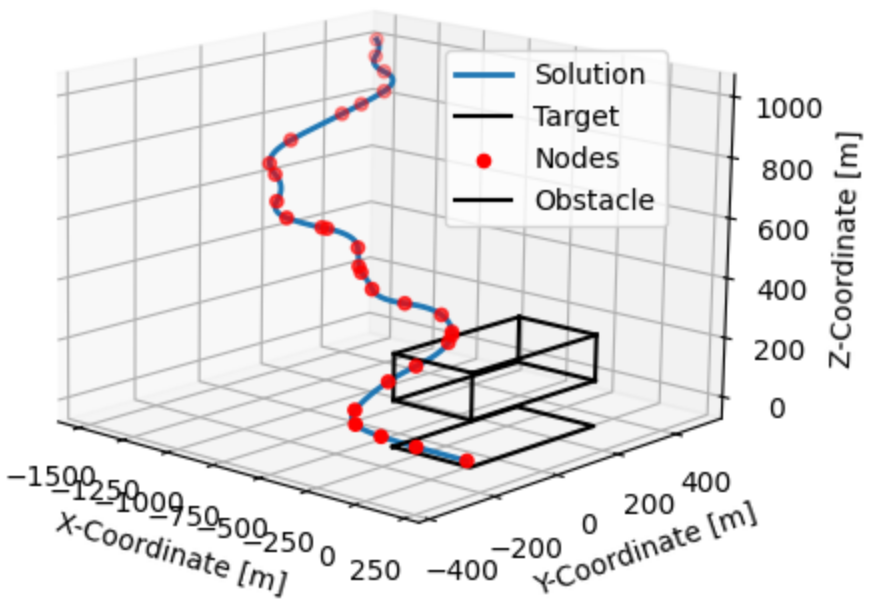
大多数跳伞事故发生在滑翔伞操控和着陆阶段,通常是由于飞行员在操控滑翔伞时判断失误造成的。由于缺乏功能完善且易于使用的训练模拟器,新手飞行员的培训周期较长。此外,适用于辅助人类训练的滑翔伞轨迹规划研究仍然有限。为了弥补这一差距,本文研究了人控滑翔伞飞行的安全轨迹计算问题,并考察了这些轨迹与人类生成的解决方案相比如何。在算法方面,我们调整了Li等人提出的基于采样的运动规划器Stable Sparse RRT (SST),以应对问题约束,同时最小化倾斜角(控制工作量)作为安全性的代理。然后,我们将计算机生成的解决方案与人类生成的滑翔伞飞行数据进行比较,结果表明,该算法的相对成本比人类飞行员的性能提高了20%-80%。我们观察到,人类飞行员倾向于首先缩小与着陆区域的水平距离,然后通过盘旋下降到合适的高度来解决垂直差距,以便开始着陆操作。本文考虑的算法可以实现更平稳、更渐进的下降,并在保持安全约束的同时,以最终进近所需的精确高度到达着陆区域。总的来说,该研究展示了计算机生成的指导方针的潜力,而不是传统的经验法则,这些指导方针可以集成到未来的模拟器中,以训练飞行员进行更安全、更经济的飞行。
🔬 方法详解
问题定义:论文旨在解决人控滑翔伞安全着陆的轨迹规划问题。现有方法,特别是人类飞行员的经验性操作,往往效率不高且存在安全隐患。缺乏有效的训练模拟器加剧了这一问题,使得飞行员难以在安全的环境中学习和优化着陆策略。因此,需要一种能够生成安全、高效着陆轨迹的算法,以辅助飞行员训练和提升飞行安全性。
核心思路:论文的核心思路是利用运动规划算法自动生成优化的滑翔伞着陆轨迹。通过将安全性作为约束条件,并将控制工作量(倾斜角)最小化作为优化目标,算法能够找到一条既安全又高效的着陆路径。这种方法避免了依赖人类经验的局限性,并能够探索更广泛的轨迹空间,从而找到更优的解决方案。
技术框架:论文采用基于采样的运动规划算法Stable Sparse RRT (SST)。该算法首先在状态空间中随机采样,然后通过局部优化连接这些采样点,构建一棵搜索树。为了满足滑翔伞着陆的特定约束,论文对SST算法进行了改进,例如,加入了对倾斜角的限制,以保证飞行安全。算法的整体流程包括状态空间定义、采样策略、局部连接优化以及轨迹评估等步骤。
关键创新:论文的关键创新在于将SST算法应用于滑翔伞着陆轨迹规划,并针对该问题进行了定制化的改进。通过将倾斜角最小化作为优化目标,算法能够生成更平滑、更安全的轨迹。此外,论文还通过与人类飞行员的飞行数据进行对比,验证了算法的有效性,并展示了其在提升飞行安全性和效率方面的潜力。
关键设计:论文的关键设计包括:1) 状态空间的定义,需要包含滑翔伞的位置、速度、姿态等信息;2) 采样策略,需要保证采样的均匀性和覆盖性;3) 局部连接优化,需要考虑滑翔伞的动力学约束和安全约束;4) 倾斜角的限制,需要根据滑翔伞的性能和飞行安全要求进行设置。此外,论文还可能采用了特定的损失函数来衡量轨迹的成本,例如,倾斜角的积分。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该算法生成的滑翔伞着陆轨迹在成本上优于人类飞行员的轨迹,提升幅度达到20%-80%。这一结果表明,计算机生成的轨迹规划方法具有显著的优势,可以有效地提升滑翔伞飞行的安全性和效率。此外,论文还通过对比分析,揭示了人类飞行员在着陆策略上的局限性,为改进飞行员训练方法提供了参考。
🎯 应用场景
该研究成果可应用于滑翔伞飞行员训练模拟器,为飞行员提供更安全、更高效的着陆指导。此外,该算法还可用于开发自动滑翔伞系统,例如,用于物资投放或救援任务。未来,该技术有望推广到其他类型的飞行器,例如,无人机或垂直起降飞行器,以提升其安全性和自主性。
📄 摘要(原文)
Most skydiving accidents occur during the parafoil-piloting and landing stages and result from human lapses in judgment while piloting the parafoil. Training of novice pilots is protracted due to the lack of functional and easily accessible training simulators. Moreover, work on parafoil trajectory planning suitable for aiding human training remains limited. To bridge this gap, we study the problem of computing safe trajectories for human-piloted parafoil flight and examine how such trajectories fare against human-generated solutions. For the algorithmic part, we adapt the sampling-based motion planner Stable Sparse RRT (SST) by Li et al., to cope with the problem constraints while minimizing the bank angle (control effort) as a proxy for safety. We then compare the computer-generated solutions with data from human-generated parafoil flight, where the algorithm offers a relative cost improvement of 20\%-80\% over the performance of the human pilot. We observe that human pilots tend to, first, close the horizontal distance to the landing area, and then address the vertical gap by spiraling down to the suitable altitude for starting a landing maneuver. The algorithm considered here makes smoother and more gradual descents, arriving at the landing area at the precise altitude necessary for the final approach while maintaining safety constraints. Overall, the study demonstrates the potential of computer-generated guidelines, rather than traditional rules of thumb, which can be integrated into future simulators to train pilots for safer and more cost-effective flights.