Contact SLAM: An Active Tactile Exploration Policy Based on Physical Reasoning Utilized in Robotic Fine Blind Manipulation Tasks
作者: Gaozhao Wang, Xing Liu, Zhenduo Ye, Zhengxiong Liu, Panfeng Huang
分类: cs.RO
发布日期: 2025-12-11 (更新: 2026-01-26)
备注: 9 pages, 9 figures
💡 一句话要点
提出Contact SLAM,解决机器人盲操作中基于触觉的主动探索问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 触觉SLAM 盲操作 主动探索 接触认知 机器人操作
📋 核心要点
- 接触密集型操作对机器人来说极具挑战,尤其是在视觉受限的盲操作场景下,准确感知环境状态是关键。
- Contact SLAM 是一种物理驱动的接触认知方法,它利用触觉信息和先验知识估计环境状态,并结合主动探索策略提高效率。
- 实验结果表明,Contact SLAM 在插座组装和推块等任务中表现出良好的效果和精度,验证了其有效性。
📝 摘要(中文)
在机器人难以执行且需要精确环境感知的接触密集型操作中,视觉信息可能被遮挡,导致机器人无法通过视觉反馈获取实时场景状态,即“盲操作”。本文提出了一种新颖的物理驱动的接触认知方法,称为“Contact SLAM”。该方法仅利用触觉传感和场景先验知识来估计环境状态并实现操作。为了最大化探索效率,本文还设计了一种主动探索策略,逐步降低操作场景中的不确定性。实验结果表明,该方法在包括困难且精细的插座组装任务和推块任务在内的多个接触密集型任务中有效且准确。
🔬 方法详解
问题定义:论文旨在解决机器人盲操作中,仅依赖触觉信息进行环境感知和操作的问题。现有方法在视觉遮挡的情况下,难以准确估计环境状态,导致操作失败或效率低下。尤其是在接触密集型任务中,精确的触觉反馈和有效的探索策略至关重要。
核心思路:论文的核心思路是利用触觉信息构建环境地图,并结合主动探索策略,逐步降低环境的不确定性。通过物理推理,将触觉感知转化为对环境状态的估计,并指导机器人的下一步动作。这种方法模拟了人类在盲操作时通过触摸进行探索和认知的过程。
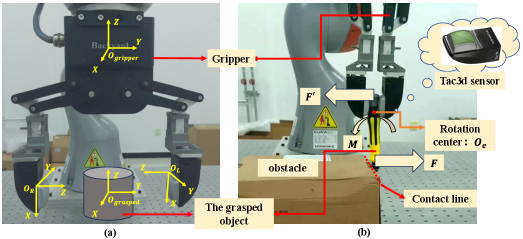
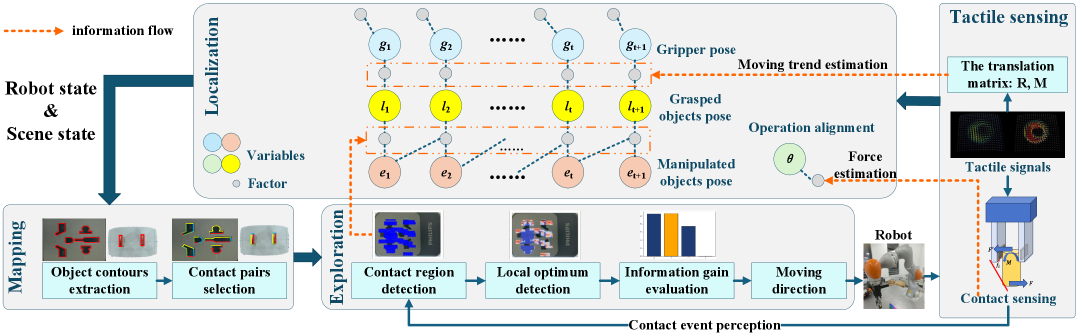
技术框架:Contact SLAM 的整体框架包含以下几个主要模块:1) 触觉数据采集:通过触觉传感器获取机器人与环境的接触信息。2) 环境状态估计:利用触觉数据和先验知识,估计环境的状态,例如物体的位置、形状和方向。3) 主动探索策略:根据当前环境状态的估计,选择下一步的探索动作,以最大程度地降低环境的不确定性。4) 操作执行:根据环境状态的估计,执行相应的操作,例如插拔、推拉等。
关键创新:该方法最重要的创新点在于将触觉 SLAM 与主动探索策略相结合,实现了在盲操作场景下的高效环境感知和操作。与传统的视觉 SLAM 相比,Contact SLAM 更加依赖于物理推理和触觉反馈,能够更好地适应视觉受限的环境。主动探索策略的设计也显著提高了探索效率,减少了不必要的触觉交互。
关键设计:主动探索策略的设计是关键。论文设计了一种基于信息增益的探索策略,选择能够最大程度降低环境不确定性的动作。具体而言,该策略会评估不同动作可能产生的触觉反馈,并选择能够提供最多信息的动作。此外,论文还可能涉及到一些参数设置,例如触觉传感器的灵敏度、环境状态估计的置信度阈值等,但具体细节未知。
🖼️ 关键图片

📊 实验亮点
实验结果表明,Contact SLAM 在插座组装和推块任务中表现出良好的性能。具体而言,该方法能够成功完成插座组装任务,并且在推块任务中能够准确地估计物体的位置和方向。与没有主动探索策略的方法相比,Contact SLAM 能够更快地降低环境的不确定性,提高操作效率。具体的性能数据和提升幅度未知。
🎯 应用场景
Contact SLAM 在许多领域具有潜在的应用价值,例如:在黑暗或狭窄空间内的机器人操作、医疗手术机器人、装配线上的自动化装配、以及灾难救援等场景。该技术能够使机器人在视觉受限的环境下执行复杂的任务,提高生产效率和安全性,并为人类提供更可靠的辅助。
📄 摘要(原文)
Contact-rich manipulation is difficult for robots to execute and requires accurate perception of the environment. In some scenarios, vision is occluded. The robot can then no longer obtain real-time scene state information through visual feedback. This is called
blind manipulation". In this manuscript, a novel physically-driven contact cognition method, calledContact SLAM", is proposed. It estimates the state of the environment and achieves manipulation using only tactile sensing and prior knowledge of the scene. To maximize exploration efficiency, this manuscript also designs an active exploration policy. The policy gradually reduces uncertainties in the manipulation scene. The experimental results demonstrated the effectiveness and accuracy of the proposed method in several contact-rich tasks, including the difficult and delicate socket assembly task and block-pushing task.