Fast Functionally Redundant Inverse Kinematics for Robotic Toolpath Optimisation in Manufacturing Tasks
作者: Andrew Razjigaev, Hans Lohr, Alejandro Vargas-Uscategui, Peter King, Tirthankar Bandyopadhyay
分类: cs.RO
发布日期: 2025-12-10
备注: Published at the Australasian Conference on Robotics and Automation (ACRA 2025) https://ssl.linklings.net/conferences/acra/acra2025_proceedings/views/includes/files/pap149s2.pdf
💡 一句话要点
提出快速功能冗余逆运动学算法,优化制造任务中机器人工具路径
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 功能冗余 逆运动学 机器人 工具路径优化 阻尼最小二乘法
📋 核心要点
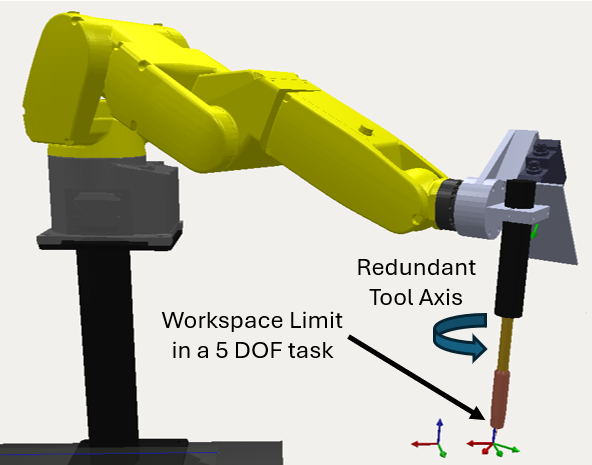
- 工业机器人六轴机械臂在制造任务中至关重要,但由于对称工具轴,许多操作实际上是五轴任务,存在功能冗余。
- 论文提出一种基于任务空间分解、阻尼最小二乘法和Halley法的功能冗余逆运动学算法,旨在快速、稳健地求解并减少关节运动。
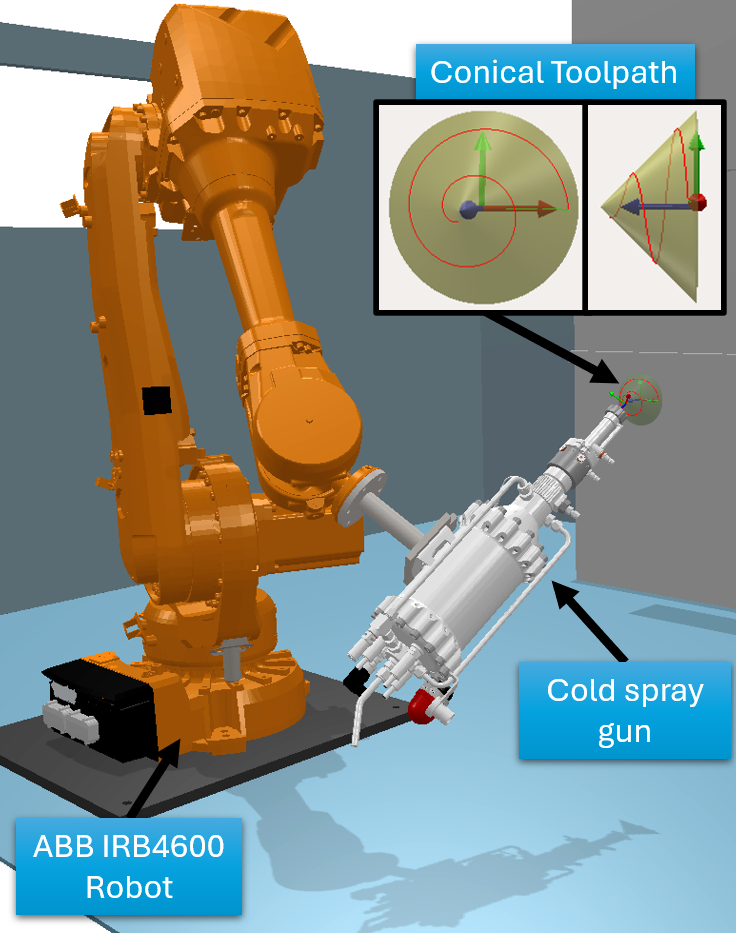
- 实验表明,该算法能快速解决运动规划问题,最小化关节运动,扩大复杂工具路径的可行操作空间,并在ABB机械臂和冷喷涂枪上验证。
📝 摘要(中文)
本文提出了一种新颖的算法,用于解决机器人操作中的功能冗余逆运动学问题。该算法利用任务空间分解方法、阻尼最小二乘法和Halley法,以实现快速、鲁棒的解决方案并减少关节运动。该方法在非平面表面冷喷涂应用中的工具路径优化中进行了评估。功能冗余逆运动学算法能够快速解决最小化关节运动的运动规划,从而扩大了复杂工具路径的可行操作空间。该方法已在工业ABB机械臂和冷喷涂枪上进行了验证,执行了计算出的工具路径。
🔬 方法详解
问题定义:论文旨在解决工业机器人,特别是六轴机械臂在执行制造任务(如焊接、增材制造、冷喷涂等)时,由于工具轴对称而产生的功能冗余问题。传统逆运动学方法在处理此类冗余时,计算效率较低,难以满足实时性和优化需求,限制了机器人工作空间和灵活性。现有离线规划方法计算量大,反应速度慢,无法适应动态环境。
核心思路:论文的核心思路是利用任务空间分解,将六自由度任务分解为更低维度的子任务,并结合阻尼最小二乘法和Halley法,快速求解功能冗余逆运动学。通过这种方式,算法能够在满足任务要求的同时,优化关节运动,避免奇异点,并提高计算效率。
技术框架:该算法主要包含以下几个阶段:1. 任务空间分解:将六自由度任务分解为位置和姿态子任务。2. 逆运动学求解:使用阻尼最小二乘法和Halley法迭代求解关节角度,同时考虑关节运动的约束。3. 冗余解析:利用功能冗余自由度,优化关节运动,例如最小化关节运动幅度或避免奇异点。4. 运动规划:生成平滑的关节轨迹,控制机器人执行任务。
关键创新:该算法的关键创新在于:1. 任务空间分解与数值优化方法的结合:将任务空间分解与阻尼最小二乘法和Halley法相结合,提高了求解效率和鲁棒性。2. Halley法加速收敛:相比于传统的牛顿法,Halley法具有更快的收敛速度,能够减少迭代次数,提高实时性。3. 功能冗余的有效利用:通过优化关节运动,避免奇异点,扩大了机器人的工作空间。
关键设计:算法的关键设计包括:1. 阻尼系数的选择:阻尼最小二乘法中的阻尼系数需要根据具体任务和机器人结构进行调整,以平衡求解精度和鲁棒性。2. Halley法的迭代步长:Halley法的迭代步长需要进行适当调整,以避免发散。3. 关节运动优化目标:可以根据具体任务选择不同的优化目标,例如最小化关节运动幅度、避免奇异点等。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该功能冗余逆运动学算法能够快速有效地解决冷喷涂应用中的工具路径优化问题。与传统方法相比,该算法能够显著减少关节运动,扩大可行操作空间。在ABB工业机械臂上的验证表明,该算法能够生成平滑的关节轨迹,并成功执行冷喷涂任务。具体的性能数据(如计算时间、关节运动幅度等)未在摘要中明确给出,属于未知信息。
🎯 应用场景
该研究成果可广泛应用于需要高精度和灵活性的工业机器人应用中,例如焊接、增材制造、喷涂、打磨等。通过优化工具路径和关节运动,可以提高生产效率、产品质量和机器人寿命。此外,该算法还可应用于医疗机器人、服务机器人等领域,提升机器人的操作能力和安全性。未来,该研究有望推动机器人智能化和自动化水平的提升。
📄 摘要(原文)
Industrial automation with six-axis robotic arms is critical for many manufacturing tasks, including welding and additive manufacturing applications; however, many of these operations are functionally redundant due to the symmetrical tool axis, which effectively makes the operation a five-axis task. Exploiting this redundancy is crucial for achieving the desired workspace and dexterity required for the feasibility and optimisation of toolpath planning. Inverse kinematics algorithms can solve this in a fast, reactive framework, but these techniques are underutilised over the more computationally expensive offline planning methods. We propose a novel algorithm to solve functionally redundant inverse kinematics for robotic manipulation utilising a task space decomposition approach, the damped least-squares method and Halley's method to achieve fast and robust solutions with reduced joint motion. We evaluate our methodology in the case of toolpath optimisation in a cold spray coating application on a non-planar surface. The functionally redundant inverse kinematics algorithm can quickly solve motion plans that minimise joint motion, expanding the feasible operating space of the complex toolpath. We validate our approach on an industrial ABB manipulator and cold-spray gun executing the computed toolpath.