Openpi Comet: Competition Solution For 2025 BEHAVIOR Challenge
作者: Junjie Bai, Yu-Wei Chao, Qizhi Chen, Jinwei Gu, Moo Jin Kim, Zhaoshuo Li, Xuan Li, Tsung-Yi Lin, Ming-Yu Liu, Nic Ma, Kaichun Mo, Delin Qu, Shangkun Sun, Hongchi Xia, Fangyin Wei, Xiaohui Zeng
分类: cs.RO
发布日期: 2025-12-10 (更新: 2026-01-05)
备注: Post-challenge bug fix
🔗 代码/项目: GITHUB
💡 一句话要点
OpenPI Comet在BEHAVIOR挑战赛中获得亚军,通过系统性研究训练技巧和数据显著提升性能。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 具身智能 长时程任务 强化学习 预训练模型 BEHAVIOR挑战赛
📋 核心要点
- BEHAVIOR-1K挑战赛旨在评估具身智能体在现实环境中解决长时程任务的能力,现有方法难以有效应对。
- OpenPI Comet通过系统研究训练技巧和数据,充分利用预训练和后训练阶段的扩展优势,提升模型性能。
- 该方案在BEHAVIOR挑战赛中取得亚军,验证Q-score达到0.345,显著超越了之前的最佳性能。
📝 摘要(中文)
本文介绍了OpenPI Comet在2025 BEHAVIOR挑战赛中的解决方案,该方案以非常接近的差距获得第二名,并显著优于其他提交方案。BEHAVIOR-1K专注于日常家庭任务,旨在推动具身智能体在模拟环境中解决长时程任务的进展。该方案基于$π_{0.5}$,通过系统性地研究训练技巧和数据的影响来构建。通过细致的消融研究,揭示了预训练和后训练阶段的扩展优势,从而实现了0.345的验证Q-score,显著超越了先前的最先进性能。总结了实践经验和设计建议,希望为更广泛的具身AI社区在将强大的基础模型应用于复杂的具身场景时提供可操作的见解。
🔬 方法详解
问题定义:BEHAVIOR-1K挑战赛旨在评估具身智能体在模拟环境中完成复杂家庭任务的能力。现有方法在处理长时程、高自由度的任务时,面临着探索效率低、泛化能力弱等问题,难以有效利用数据和先验知识。
核心思路:OpenPI Comet的核心思路是充分利用大规模预训练模型,并通过系统性的训练技巧和数据增强策略,提升模型在特定任务上的性能。通过消融实验,深入理解不同训练策略和数据规模对模型性能的影响,从而找到最优的训练方案。
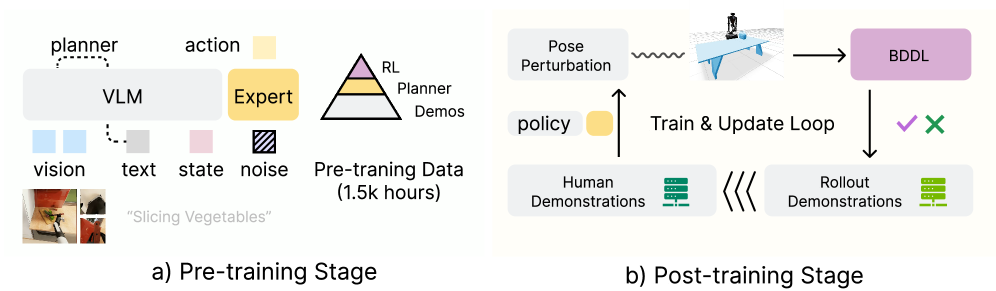
技术框架:OpenPI Comet基于$π_{0.5}$模型,整体框架包括预训练阶段和后训练阶段。在预训练阶段,利用大规模数据集进行通用能力学习;在后训练阶段,针对BEHAVIOR-1K任务进行微调和优化。该框架还包括数据增强模块,用于扩充训练数据,提高模型的泛化能力。
关键创新:该方案的关键创新在于系统性地研究了训练技巧和数据对模型性能的影响。通过消融实验,揭示了预训练和后训练阶段的扩展优势,并提出了有效的训练策略和数据增强方法。此外,该方案还关注了模型在长时程任务中的探索效率和泛化能力。
关键设计:在预训练阶段,使用了大规模的视觉-语言数据集进行训练,学习通用的视觉和语言表示。在后训练阶段,使用了强化学习算法进行微调,并设计了合适的奖励函数来引导智能体完成任务。此外,还使用了数据增强技术,如随机裁剪、旋转等,来提高模型的鲁棒性。具体的参数设置和网络结构细节未在摘要中详细说明,属于未知信息。
🖼️ 关键图片
📊 实验亮点
OpenPI Comet在2025 BEHAVIOR挑战赛中获得亚军,验证Q-score达到0.345,显著超越了之前的最佳性能。通过消融实验,验证了预训练和后训练阶段的扩展优势,并提出了有效的训练策略和数据增强方法,为具身智能领域的研究提供了有价值的参考。
🎯 应用场景
该研究成果可应用于家庭服务机器人、智能助手等领域,帮助机器人更好地理解人类指令,并在复杂环境中完成各种任务。通过不断优化模型和训练方法,有望实现更智能、更可靠的机器人系统,提升人们的生活质量,并推动具身智能技术的发展。
📄 摘要(原文)
The 2025 BEHAVIOR Challenge is designed to rigorously track progress toward solving long-horizon tasks by physical agents in simulated environments. BEHAVIOR-1K focuses on everyday household tasks that people most want robots to assist with and these tasks introduce long-horizon mobile manipulation challenges in realistic settings, bridging the gap between current research and real-world, human-centric applications. This report presents our solution to the 2025 BEHAVIOR Challenge in a very close 2nd place and substantially outperforms the rest of the submissions. Building on $π_{0.5}$, we focus on systematically building our solution by studying the effects of training techniques and data. Through careful ablation studies, we reveal the scaling benefits in both the pre-training and post-training phases, leading to a validation Q-score of 0.345, significantly surpassing previous state-of-the-art performance. We summarize our practical lessons and design recommendations that we hope will provide actionable insights for the broader embodied AI community when adapting powerful foundation models to complex embodied scenarios. Project page: https://github.com/mli0603/openpi-comet