Bridging the Basilisk Astrodynamics Framework with ROS 2 for Modular Spacecraft Simulation and Hardware Integration
作者: Elias Krantz, Ngai Nam Chan, Gunnar Tibert, Huina Mao, Christer Fuglesang
分类: cs.RO
发布日期: 2025-12-10
备注: Presented at the International Conference on Space Robotics (iSpaRo) 2025. To appear in IEEE Xplore
💡 一句话要点
提出Basilisk与ROS 2的轻量级桥接方案,用于模块化航天器仿真与硬件集成
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 航天动力学仿真 ROS 2 通信桥接 模块化航天器 自主控制
📋 核心要点
- 现有航天器高保真仿真器与模块化机器人框架的集成面临挑战,阻碍了自主系统的快速开发与验证。
- 论文提出Basilisk与ROS 2之间的轻量级桥接方案,实现实时双向数据交换,无需修改Basilisk核心。
- 通过领-从者编队飞行场景验证,支持仿真与硬件的无缝切换,加速开发并支持硬件在环测试。
📝 摘要(中文)
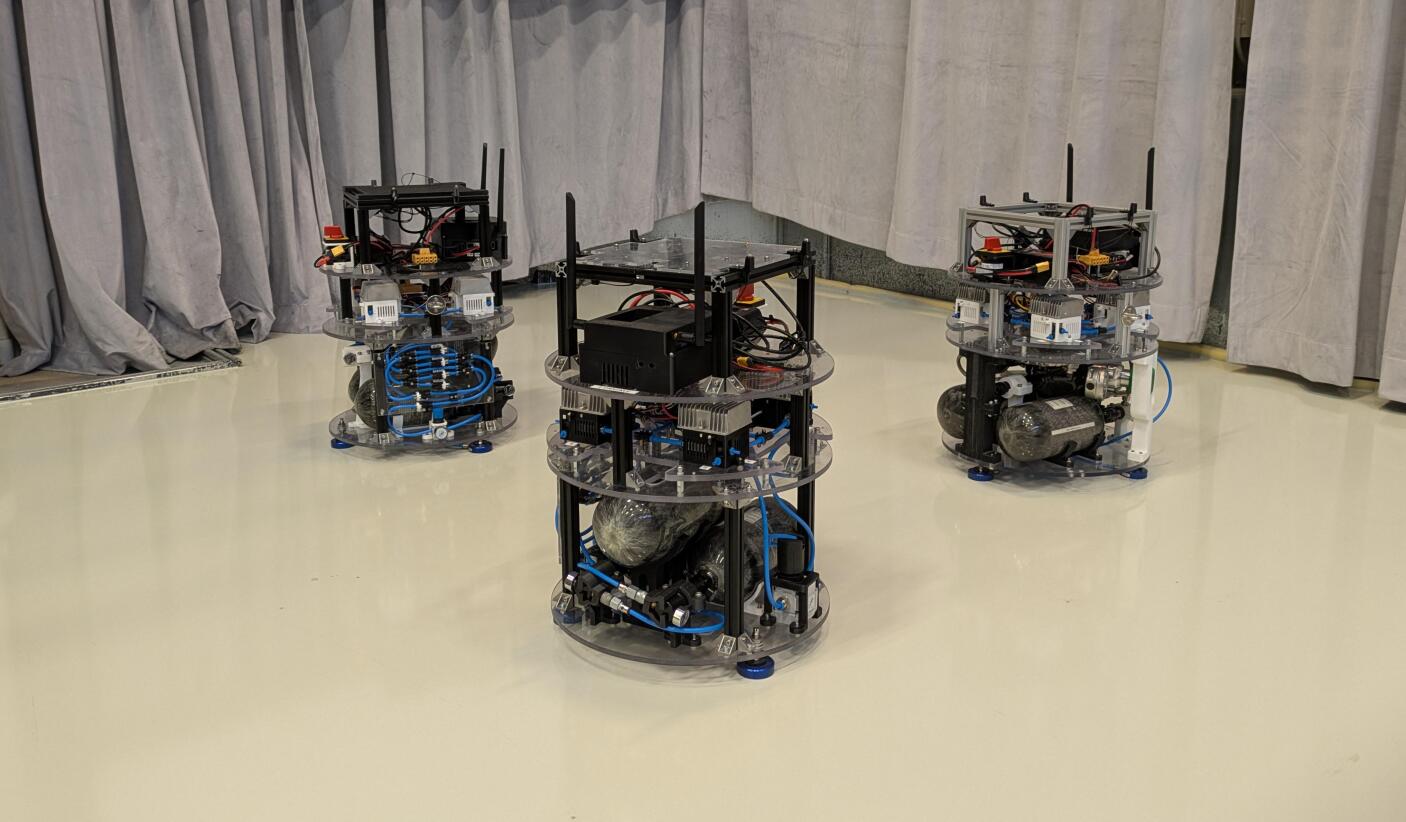
本文提出了一种轻量级的开源通信桥,用于连接高保真航天动力学仿真器Basilisk和机器人操作系统ROS 2,旨在解决自主开发中高保真仿真器与模块化机器人框架集成的问题。该桥接方案无需修改Basilisk的核心代码,并能与ROS 2节点无缝集成,实现航天器控制的实时双向数据交换。论文通过一个领-从者编队飞行场景验证了该桥接方案的有效性,该场景采用非线性模型预测控制,并在仿真和ATMOS平面微重力测试台上进行了相同的部署。该方案支持快速开发、硬件在环测试以及从仿真到硬件的无缝过渡,为模块化航天器自主性和可重复研究工作流程提供了一个灵活且可扩展的平台。
🔬 方法详解
问题定义:论文旨在解决航天器自主控制算法在仿真环境和真实硬件之间迁移的难题。现有方法通常需要复杂的配置和修改,难以实现快速原型验证和硬件在环测试,阻碍了航天器自主能力的开发效率。
核心思路:核心思路是构建一个轻量级、易于使用的通信桥,连接航天动力学仿真器Basilisk和机器人操作系统ROS 2。通过ROS 2的消息传递机制,实现Basilisk仿真环境与ROS 2控制算法之间的实时数据交换,从而简化了算法从仿真到硬件的部署过程。
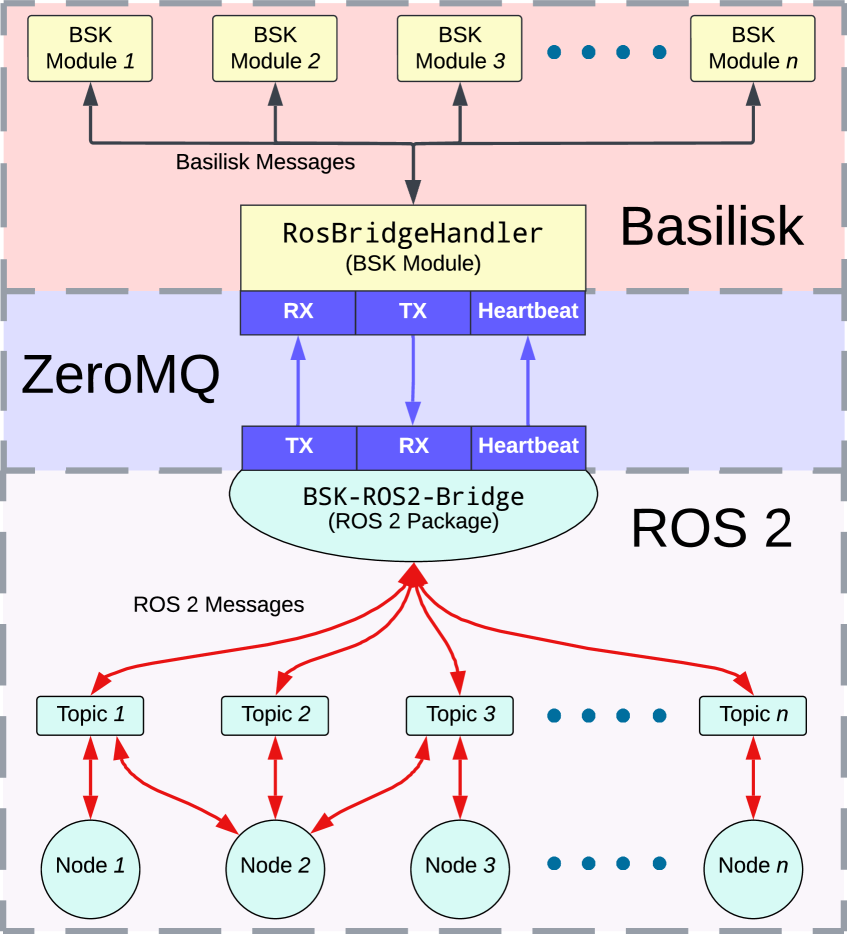
技术框架:整体框架包含Basilisk仿真环境、ROS 2节点和桥接模块。Basilisk负责提供航天器的动力学和环境模型,ROS 2节点实现控制算法,桥接模块负责在两者之间传递数据。该桥接模块基于ROS 2的客户端-服务器架构,允许ROS 2节点向Basilisk发送控制指令,并从Basilisk接收状态信息。
关键创新:最重要的创新在于桥接模块的轻量化设计和与ROS 2的无缝集成。该桥接模块无需修改Basilisk的核心代码,即可实现双向数据交换,降低了使用门槛。同时,利用ROS 2的分布式架构,可以方便地扩展和定制控制算法。
关键设计:桥接模块的关键设计包括数据类型的映射和通信协议的选择。论文选择使用ROS 2的标准消息类型,并采用UDP协议进行数据传输,以保证实时性和可靠性。此外,桥接模块还提供了配置选项,允许用户自定义数据传输的频率和精度。
🖼️ 关键图片

📊 实验亮点
论文通过领-从者编队飞行场景验证了该桥接方案的有效性。实验结果表明,该方案能够实现仿真环境和ATMOS平面微重力测试台之间的无缝切换,验证了控制算法的鲁棒性和适应性。此外,该方案还支持硬件在环测试,为航天器自主系统的开发提供了可靠的验证平台。
🎯 应用场景
该研究成果可广泛应用于航天器自主控制、编队飞行、在轨服务等领域。通过该桥接方案,研究人员可以快速开发和验证航天器控制算法,并将其无缝部署到真实硬件上,加速航天器自主能力的提升。此外,该方案还可用于教育和培训,帮助学生和工程师更好地理解航天器动力学和控制。
📄 摘要(原文)
Integrating high-fidelity spacecraft simulators with modular robotics frameworks remains a challenge for autonomy development. This paper presents a lightweight, open-source communication bridge between the Basilisk astrodynamics simulator and the Robot Operating System 2 (ROS 2), enabling real-time, bidirectional data exchange for spacecraft control. The bridge requires no changes to Basilisk's core and integrates seamlessly with ROS 2 nodes. We demonstrate its use in a leader-follower formation flying scenario using nonlinear model predictive control, deployed identically in both simulation and on the ATMOS planar microgravity testbed. This setup supports rapid development, hardware-in-the-loop testing, and seamless transition from simulation to hardware. The bridge offers a flexible and scalable platform for modular spacecraft autonomy and reproducible research workflows.