ReMoSPLAT: Reactive Mobile Manipulation Control on a Gaussian Splat
作者: Nicolas Marticorena, Tobias Fischer, Niko Suenderhauf
分类: cs.RO
发布日期: 2025-12-10
备注: 9 pages, 5 figures
💡 一句话要点
ReMoSPLAT:基于高斯溅射的移动操作机器人反应式控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱五:交互与反应 (Interaction & Reaction)
关键词: 移动操作机器人 反应式控制 高斯溅射 避障 二次规划
📋 核心要点
- 移动操作机器人的反应式控制能够协调底座和手臂的运动,但如何准确表示环境以避障是一个挑战。
- ReMoSPLAT利用高斯溅射表示环境,通过二次规划公式进行反应式控制,实现避障和末端执行器姿态控制。
- 实验表明,ReMoSPLAT在合成和真实场景中表现出与依赖完美ground-truth信息的控制器相当的性能。
📝 摘要(中文)
本文提出ReMoSPLAT,一种基于二次规划的移动操作机器人反应式控制器,利用高斯溅射表示进行避障。通过在优化公式中集成额外的约束和代价,移动操作平台能够在杂乱场景中到达目标末端执行器姿态,同时避开障碍物。我们研究了两种有效计算机器人-障碍物距离的方法的权衡,比较了一种纯几何方法和一种基于栅格化的方法。在合成和真实世界扫描的模拟实验表明了该方法的可行性,结果表明该方法实现了与依赖完美ground-truth信息的控制器相当的性能。
🔬 方法详解
问题定义:移动操作机器人需要在复杂环境中安全地到达目标姿态,同时协调底座和手臂的运动。现有方法要么依赖于代价高昂的全局规划,要么缺乏对环境的精确表示,导致避障效果不佳。
核心思路:利用高斯溅射(Gaussian Splatting)作为环境的精确表示,并将其融入到反应式控制器的二次规划框架中。高斯溅射能够高效地表示复杂场景,并提供梯度信息,便于优化。通过在优化目标中加入避障约束,使得机器人能够在到达目标姿态的同时避开障碍物。
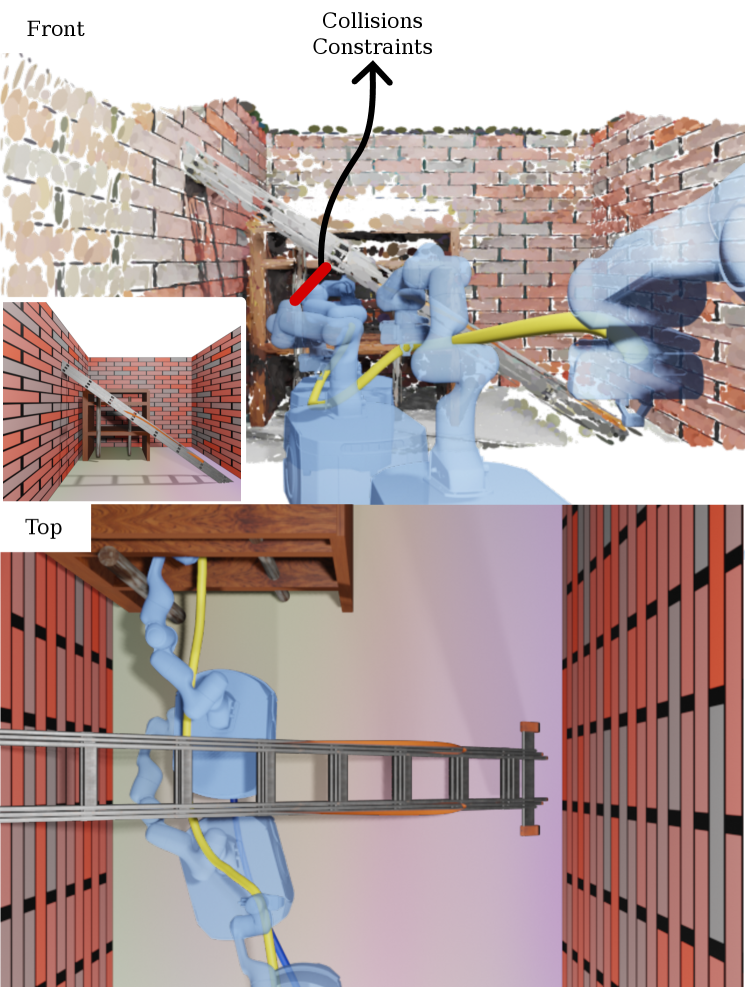
技术框架:ReMoSPLAT的整体框架包括以下几个主要模块:1) 环境表示模块:使用高斯溅射表示环境,从传感器数据中构建高斯溅射模型。2) 碰撞检测模块:计算机器人与高斯溅射表示的障碍物之间的距离。论文比较了几何方法和栅格化方法。3) 优化模块:基于二次规划,求解机器人的控制指令,目标是到达目标姿态,同时满足避障约束。4) 控制执行模块:将优化得到的控制指令发送给机器人执行。
关键创新:ReMoSPLAT的关键创新在于将高斯溅射表示与反应式控制相结合,实现了一种高效且精确的移动操作机器人控制方法。与传统的基于体素或点云的表示方法相比,高斯溅射能够更紧凑地表示环境,并提供梯度信息,从而提高了控制器的性能。
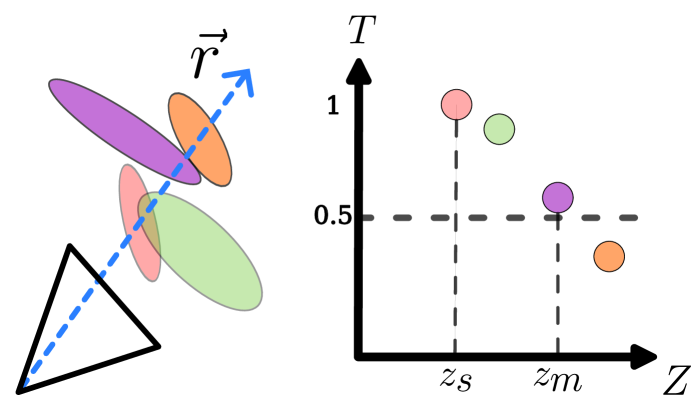
关键设计:论文比较了两种计算机器人-障碍物距离的方法:一种是纯几何方法,直接计算机器人与高斯溅射之间的距离;另一种是基于栅格化的方法,将高斯溅射栅格化,然后计算机器人与栅格地图之间的距离。优化目标函数包含末端执行器姿态误差项和避障代价项。避障代价项的设计需要平衡避障效果和控制器的平滑性。
🖼️ 关键图片

📊 实验亮点
实验结果表明,ReMoSPLAT在合成和真实场景中都取得了良好的避障效果,并且性能与依赖完美ground-truth信息的控制器相当。论文比较了几何方法和栅格化方法在计算机器人-障碍物距离方面的性能差异,发现两种方法各有优劣,需要根据具体场景进行选择。具体性能数据未知,但论文强调了与ground-truth方法的可比性。
🎯 应用场景
ReMoSPLAT可应用于各种需要移动操作机器人的场景,如仓库自动化、家庭服务机器人、灾难救援等。该方法能够使机器人在复杂环境中安全高效地完成任务,提高工作效率和安全性。未来,可以进一步研究如何将ReMoSPLAT扩展到多机器人协作场景,以及如何利用高斯溅射进行环境的动态更新。
📄 摘要(原文)
Reactive control can gracefully coordinate the motion of the base and the arm of a mobile manipulator. However, incorporating an accurate representation of the environment to avoid obstacles without involving costly planning remains a challenge. In this work, we present ReMoSPLAT, a reactive controller based on a quadratic program formulation for mobile manipulation that leverages a Gaussian Splat representation for collision avoidance. By integrating additional constraints and costs into the optimisation formulation, a mobile manipulator platform can reach its intended end effector pose while avoiding obstacles, even in cluttered scenes. We investigate the trade-offs of two methods for efficiently calculating robot-obstacle distances, comparing a purely geometric approach with a rasterisation-based approach. Our experiments in simulation on both synthetic and real-world scans demonstrate the feasibility of our method, showing that the proposed approach achieves performance comparable to controllers that rely on perfect ground-truth information.