REASAN: Learning Reactive Safe Navigation for Legged Robots
作者: Qihao Yuan, Ziyu Cao, Ming Cao, Kailai Li
分类: cs.RO
发布日期: 2025-12-10
备注: 8 pages
🔗 代码/项目: GITHUB
💡 一句话要点
REASAN:面向复杂动态环境,学习腿式机器人反应式安全导航
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 腿式机器人 反应式导航 强化学习 模块化设计 Transformer 点云处理 安全防护
📋 核心要点
- 现有腿式机器人导航方法在复杂动态环境中鲁棒性不足,依赖启发式规则或复杂的策略切换。
- REASAN采用模块化端到端框架,将导航任务分解为运动、安全防护和导航三个子策略,并使用强化学习进行训练。
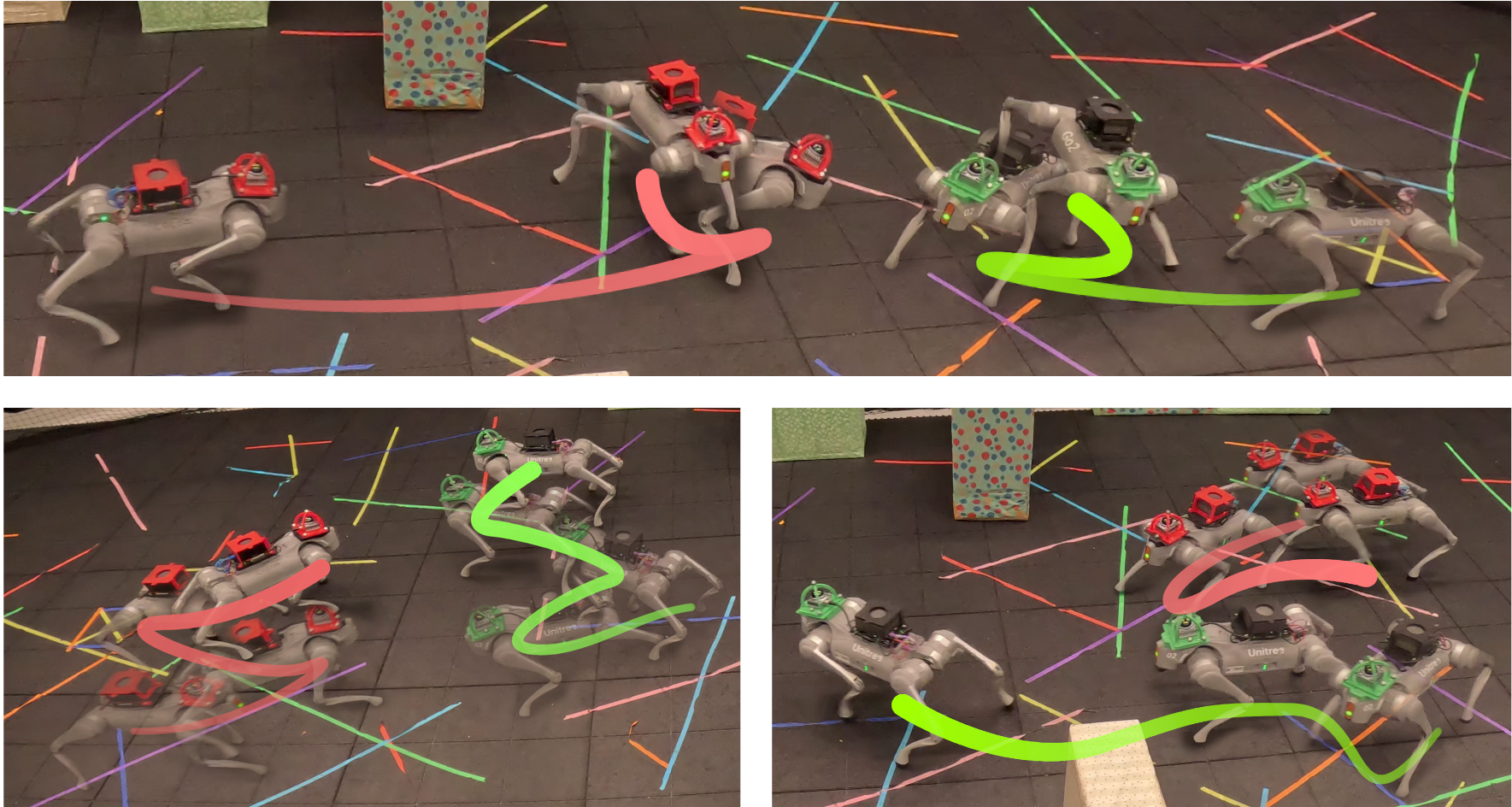
- 实验表明,REASAN在复杂导航任务中表现出更高的鲁棒性,并实现了单机器人和多机器人环境下的实时导航。
📝 摘要(中文)
本文提出了一种新颖的模块化端到端框架,用于腿式机器人在复杂动态环境中进行反应式导航,该框架仅使用单个激光雷达(LiDAR)传感器。该系统包含四个仿真训练的模块:三个用于运动、安全防护和导航的强化学习(RL)策略,以及一个基于Transformer的外部感知估计器,用于处理原始点云输入。这种对复杂腿式运动控制任务的模块化分解,使得可以使用具有简单架构的轻量级神经网络,通过标准RL实践以及有针对性的奖励塑造和课程设计进行训练,而无需依赖启发式方法或复杂的策略切换机制。我们进行了全面的消融实验,以验证我们的设计选择,并证明在具有挑战性的导航任务中,与现有方法相比,鲁棒性有所提高。最终的反应式安全导航(REASAN)系统实现了在复杂环境中单机器人和多机器人设置下的完全板载和实时反应式导航。我们在https://github.com/ASIG-X/REASAN上发布了我们的训练和部署代码。
🔬 方法详解
问题定义:论文旨在解决腿式机器人在复杂动态环境中安全、高效导航的问题。现有方法通常依赖于人工设计的启发式规则或复杂的策略切换机制,难以适应环境变化,鲁棒性较差。此外,直接从原始传感器数据进行端到端学习面临训练难度大、泛化能力弱等挑战。
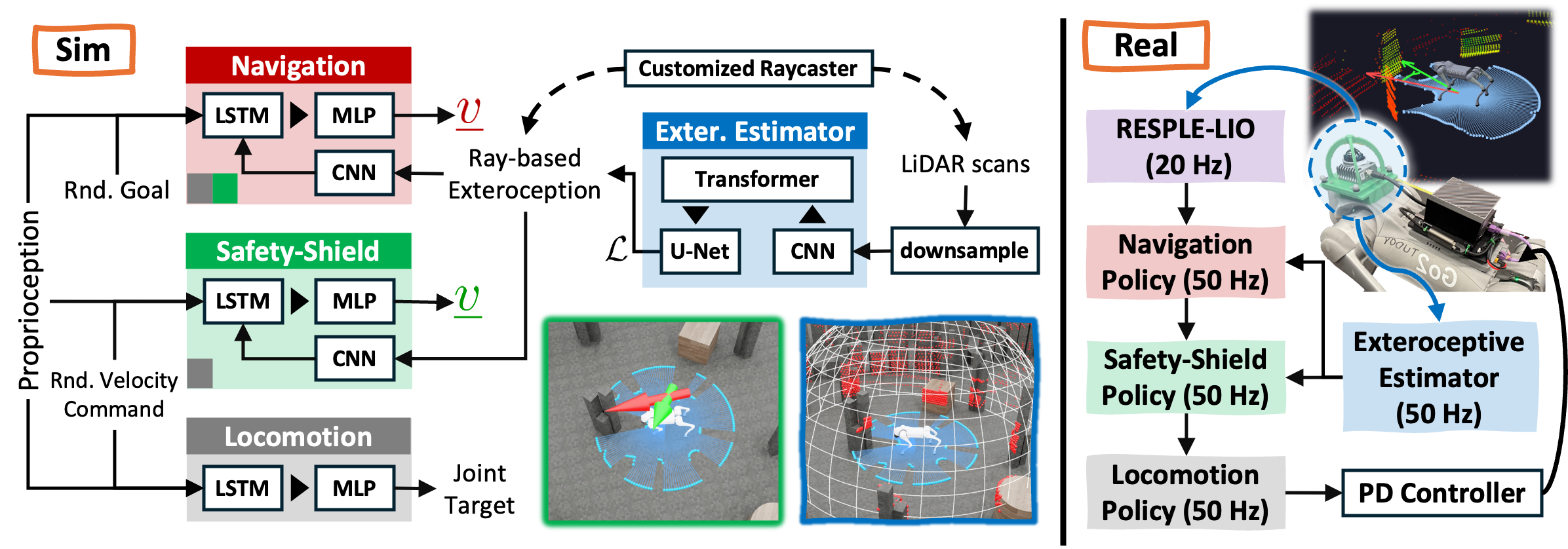
核心思路:论文的核心思路是将复杂的导航任务分解为多个模块化的子任务,包括运动控制、安全防护和导航策略。每个模块分别使用强化学习进行训练,并通过一个基于Transformer的外部感知估计器处理原始点云数据。这种模块化设计降低了学习难度,提高了系统的鲁棒性和泛化能力。
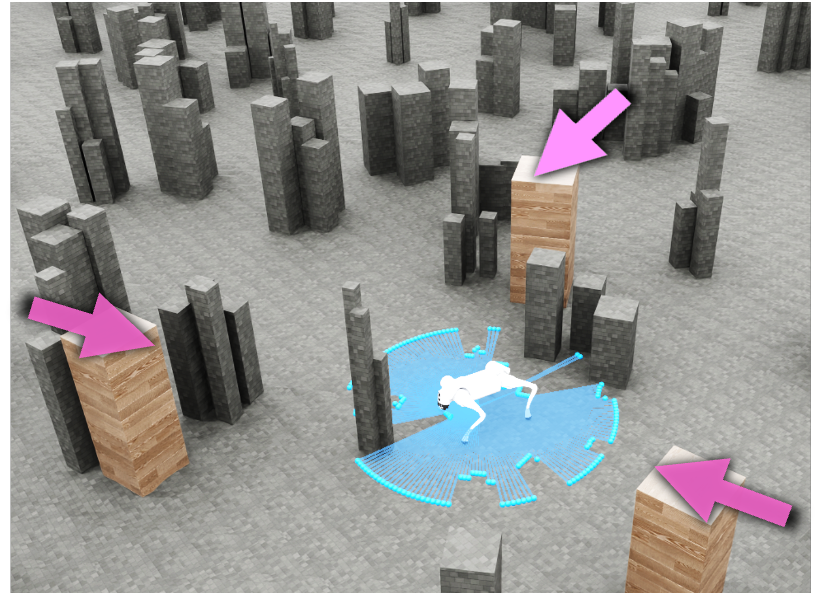
技术框架:REASAN系统包含四个主要模块:1) 基于Transformer的外部感知估计器,用于从LiDAR点云数据中提取环境特征;2) 运动控制策略,负责控制机器人的运动;3) 安全防护策略,负责避免机器人与障碍物发生碰撞;4) 导航策略,负责引导机器人到达目标位置。后三个模块均采用强化学习进行训练。整体流程是:LiDAR数据经过外部感知估计器处理后,输入到运动控制、安全防护和导航策略中,生成相应的控制指令,驱动机器人运动。
关键创新:论文的关键创新在于提出了一种模块化的端到端学习框架,将复杂的导航任务分解为多个子任务,并分别使用强化学习进行训练。这种模块化设计降低了学习难度,提高了系统的鲁棒性和泛化能力。此外,论文还提出了一种基于Transformer的外部感知估计器,能够有效地从原始点云数据中提取环境特征。与现有方法相比,REASAN无需依赖人工设计的启发式规则或复杂的策略切换机制,能够更好地适应环境变化。
关键设计:论文采用标准强化学习算法(具体算法未知)训练运动控制、安全防护和导航策略。奖励函数的设计至关重要,需要针对每个子任务进行精心设计,以引导策略学习到期望的行为。课程学习也被用于加速训练过程,从简单的环境开始,逐步增加环境的复杂性。Transformer的结构和参数设置未知,但其作用是从原始点云中提取有效特征。
🖼️ 关键图片
📊 实验亮点
论文通过消融实验验证了各个模块的有效性,并与现有方法进行了对比。实验结果表明,REASAN在复杂导航任务中表现出更高的鲁棒性,能够成功完成更多任务。具体的性能数据和提升幅度在摘要中未明确给出,但强调了其在单机器人和多机器人环境下的实时反应式导航能力。
🎯 应用场景
REASAN技术可应用于物流仓储、灾害救援、安防巡逻等领域。在这些场景中,腿式机器人需要在复杂动态环境中自主导航,完成各种任务。REASAN的实时性和鲁棒性使其能够胜任这些挑战性任务,提高工作效率和安全性。未来,该技术有望进一步推广到更多领域,例如家庭服务、医疗辅助等。
📄 摘要(原文)
We present a novel modularized end-to-end framework for legged reactive navigation in complex dynamic environments using a single light detection and ranging (LiDAR) sensor. The system comprises four simulation-trained modules: three reinforcement-learning (RL) policies for locomotion, safety shielding, and navigation, and a transformer-based exteroceptive estimator that processes raw point-cloud inputs. This modular decomposition of complex legged motor-control tasks enables lightweight neural networks with simple architectures, trained using standard RL practices with targeted reward shaping and curriculum design, without reliance on heuristics or sophisticated policy-switching mechanisms. We conduct comprehensive ablations to validate our design choices and demonstrate improved robustness compared to existing approaches in challenging navigation tasks. The resulting reactive safe navigation (REASAN) system achieves fully onboard and real-time reactive navigation across both single- and multi-robot settings in complex environments. We release our training and deployment code at https://github.com/ASIG-X/REASAN.