Development of a Compliant Gripper for Safe Robot-Assisted Trouser Dressing-Undressing
作者: Jayant Unde, Takumi Inden, Yuki Wakayama, Jacinto Colan, Yaonan Zhu, Tadayoshi Aoyama, Yasuhisa Hasegawa
分类: cs.RO
发布日期: 2025-12-10
期刊: Unde, J., Inden, T., Wakayama, Y., Colan, J., Zhu, Y., Aoyama, T., and Hasegawa, Y. (2024). Development of a compliant gripper for safe robot-assisted trouser dressing--undressing. \textit{Advanced Robotics}, 38(19--20), 1424--1440
DOI: 10.1080/01691864.2024.2376024
💡 一句话要点
针对老年人穿脱裤子辅助,提出一种安全顺应性机器人夹持器
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 辅助机器人 顺应性夹持器 穿脱裤子辅助 老年人辅助 机器人辅助
📋 核心要点
- 老年人如厕辅助是重要需求,现有方法在安全性与操作精度间难以平衡,限制了应用。
- 设计了一种兼顾顺应性和抓取力的夹持器,集成到机器人系统中,辅助穿脱裤子。
- 实验验证了夹持器在狭小空间内辅助穿脱裤子的能力,成功率高,提升了生活质量。
📝 摘要(中文)
本研究针对日本等国人口老龄化加剧,老年人生活质量维持成为重要课题的现状,着重探讨了辅助老年人或偏瘫患者穿脱裤子过程中遇到的独特需求和挑战,详细介绍了夹持器系统的设计、开发、实验评估和潜在应用。所提出的夹持器旨在平衡顺应性和抓取力,确保精确操作的同时,维持与用户的安全顺应性交互。该夹持器集成到定制的机器人机械臂系统中,为辅助偏瘫患者穿脱裤子提供了一个全面的解决方案。实验评估和与现有研究的比较表明,该夹持器能够成功地辅助在狭小空间内穿脱裤子,并具有较高的成功率。这项研究有助于推进辅助机器人技术的发展,使老年人和身体残疾人士能够保持独立性并提高生活质量。
🔬 方法详解
问题定义:论文旨在解决老年人或偏瘫患者在穿脱裤子时遇到的困难,现有机器人辅助系统往往难以在保证抓取力的同时,提供足够的顺应性,容易造成不适甚至伤害。因此,如何在狭小空间内安全、有效地辅助穿脱裤子是本研究要解决的核心问题。
核心思路:论文的核心思路是设计一种兼具顺应性和抓取力的夹持器。顺应性保证了与人体的安全交互,避免造成伤害;抓取力则保证了能够稳定地抓取和操作裤子。通过平衡这两者,实现安全有效的辅助穿脱裤子。
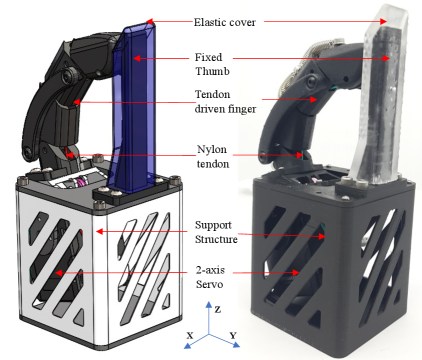
技术框架:该系统主要由两部分组成:一是定制的机器人机械臂,二是本文提出的顺应性夹持器。机械臂负责提供运动范围和操作空间,夹持器则直接与裤子和人体接触,完成抓取和操作。整个系统通过控制算法协调运动,实现辅助穿脱裤子的功能。
关键创新:该论文的关键创新在于夹持器的设计,它在保证足够抓取力的前提下,引入了顺应性机制,使得夹持器在与人体接触时能够自动调整姿态和力度,避免造成伤害。这种顺应性设计是与现有夹持器最本质的区别。
关键设计:论文中没有详细描述夹持器的具体参数设置、损失函数或网络结构等技术细节,但强调了顺应性机制的设计,这可能是通过特殊的材料选择、结构设计或控制算法实现的。具体的技术细节未知,需要查阅论文全文或相关文献。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该夹持器能够成功辅助在狭小空间内穿脱裤子,并具有较高的成功率。虽然论文摘要中没有给出具体的性能数据或对比基线,但强调了与现有研究的比较,表明该夹持器在辅助穿脱裤子方面具有一定的优势。具体的提升幅度未知,需要查阅论文全文。
🎯 应用场景
该研究成果可应用于养老院、康复中心和家庭等场景,为老年人、偏瘫患者和其他行动不便的人群提供辅助穿脱裤子的服务,提高他们的生活质量和独立性。未来,该技术还可以扩展到其他服装的辅助穿脱,甚至应用于其他需要精细操作和安全交互的辅助机器人领域。
📄 摘要(原文)
In recent years, many countries, including Japan, have rapidly aging populations, making the preservation of seniors' quality of life a significant concern. For elderly people with impaired physical abilities, support for toileting is one of the most important issues. This paper details the design, development, experimental assessment, and potential application of the gripper system, with a focus on the unique requirements and obstacles involved in aiding elderly or hemiplegic individuals in dressing and undressing trousers. The gripper we propose seeks to find the right balance between compliance and grasping forces, ensuring precise manipulation while maintaining a safe and compliant interaction with the users. The gripper's integration into a custom--built robotic manipulator system provides a comprehensive solution for assisting hemiplegic individuals in their dressing and undressing tasks. Experimental evaluations and comparisons with existing studies demonstrate the gripper's ability to successfully assist in both dressing and dressing of trousers in confined spaces with a high success rate. This research contributes to the advancement of assistive robotics, empowering elderly, and physically impaired individuals to maintain their independence and improve their quality of life.