A Hierarchical, Model-Based System for High-Performance Humanoid Soccer
作者: Quanyou Wang, Mingzhang Zhu, Ruochen Hou, Kay Gillespie, Alvin Zhu, Shiqi Wang, Yicheng Wang, Gaberiel I. Fernandez, Yeting Liu, Colin Togashi, Hyunwoo Nam, Aditya Navghare, Alex Xu, Taoyuanmin Zhu, Min Sung Ahn, Arturo Flores Alvarez, Justin Quan, Ethan Hong, Dennis W. Hong
分类: cs.RO
发布日期: 2025-12-10
💡 一句话要点
提出一种分层模型系统,助力人形机器人ARTEMIS在RoboCup 2024中获胜
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 足球机器人 RoboCup 感知融合 运动控制
📋 核心要点
- 现有的人形机器人足球系统在动态环境下的感知、运动控制和策略决策方面存在挑战,难以实现高性能。
- 该论文提出了一种分层、基于模型的系统,集成了硬件和软件创新,以实现快速、精确和战术有效的游戏玩法。
- ARTEMIS系统在RoboCup 2024成人尺寸人形机器人足球比赛中获胜,验证了所提出方法在动态对抗环境下的鲁棒性。
📝 摘要(中文)
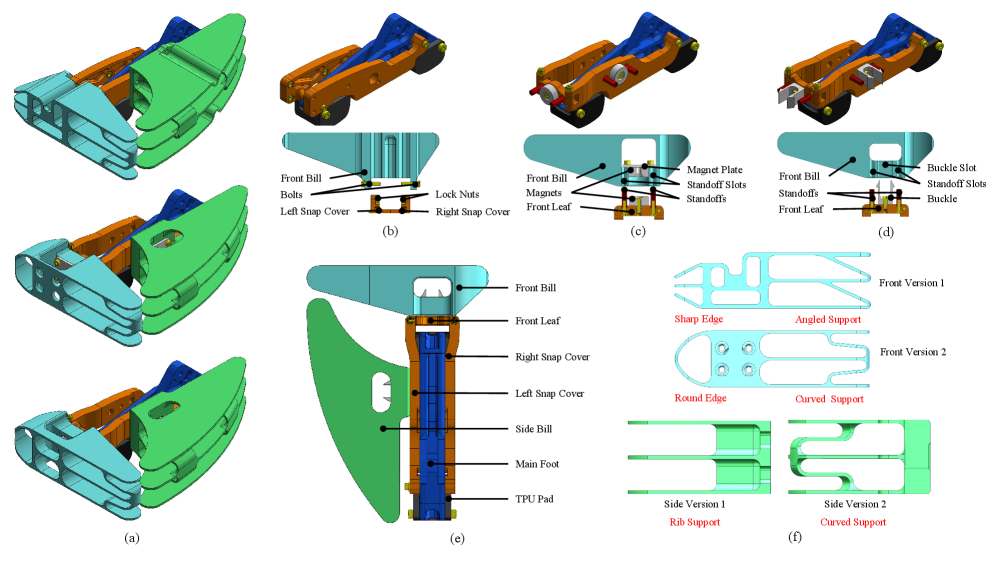
本文介绍了一种高性能人形机器人足球系统的硬件和软件创新,该系统助力团队在RoboCup 2024成人尺寸人形机器人足球比赛中获胜。在硬件方面,我们推出了一种成人尺寸的人形机器人平台,该平台采用轻量化结构组件、高扭矩准直驱执行器和专门的足部设计,可在步态中实现强大的踢球能力,同时保持运动的稳健性。在软件方面,我们开发了一个集成的感知和定位框架,该框架结合了立体视觉、目标检测和基于地标的融合,以提供对球、球门、队友和对手的可靠估计。然后,一个中层导航堆栈生成规避碰撞的、动态可行的轨迹,而一个集中式行为管理器根据不断变化的游戏状态协调高级决策、角色选择和踢球执行。这些子系统的无缝集成带来了快速、精确和战术有效的游戏玩法,从而在真实比赛的动态和对抗条件下实现了强大的性能。本文介绍了促成ARTEMIS作为2024年成人尺寸人形机器人足球冠军的设计原则、系统架构和实验结果。
🔬 方法详解
问题定义:人形机器人足球比赛需要在动态和对抗的环境中,实现自主导航、目标识别、策略决策和运动控制。现有的方法在感知精度、运动灵活性和策略智能方面存在不足,难以适应复杂的游戏场景。
核心思路:该论文的核心思路是构建一个分层的、基于模型的系统,将感知、导航和行为控制模块进行有效集成。通过硬件和软件的协同设计,提高机器人的运动能力和智能水平,从而在比赛中取得优势。
技术框架:该系统主要包含以下几个模块:1) 硬件平台:采用轻量化结构、高扭矩执行器和特殊足部设计;2) 感知和定位:融合立体视觉、目标检测和地标信息;3) 导航:生成规避碰撞的动态可行轨迹;4) 行为控制:集中式行为管理器进行高级决策、角色选择和踢球执行。
关键创新:该系统的关键创新在于硬件和软件的协同设计,以及各个模块之间的紧密集成。特别是在感知方面,融合了多种传感器信息,提高了目标识别的准确性和鲁棒性。在行为控制方面,采用集中式管理,能够根据游戏状态进行动态调整。
关键设计:硬件平台采用准直驱电机,提高了运动的响应速度和精度。足部设计考虑了踢球的稳定性和运动的灵活性。感知模块使用了立体视觉和深度学习方法进行目标检测。行为控制模块使用了状态机和规则引擎进行决策。
🖼️ 关键图片


📊 实验亮点
ARTEMIS系统在RoboCup 2024成人尺寸人形机器人足球比赛中成功夺冠,验证了该系统的有效性和鲁棒性。该系统在感知、导航和行为控制方面均表现出色,能够在动态和对抗的环境中实现快速、精确和战术有效的游戏玩法。具体的性能数据和对比基线在论文中未详细给出,属于未知信息。
🎯 应用场景
该研究成果可应用于其他需要高动态性能和智能决策的机器人领域,例如搜索救援、物流运输和人机协作等。通过不断改进硬件和软件系统,有望推动人形机器人技术的发展,并最终实现与人类在复杂环境中协同工作的目标。
📄 摘要(原文)
The development of athletic humanoid robots has gained significant attention as advances in actuation, sensing, and control enable increasingly dynamic, real-world capabilities. RoboCup, an international competition of fully autonomous humanoid robots, provides a uniquely challenging benchmark for such systems, culminating in the long-term goal of competing against human soccer players by 2050. This paper presents the hardware and software innovations underlying our team's victory in the RoboCup 2024 Adult-Sized Humanoid Soccer Competition. On the hardware side, we introduce an adult-sized humanoid platform built with lightweight structural components, high-torque quasi-direct-drive actuators, and a specialized foot design that enables powerful in-gait kicks while preserving locomotion robustness. On the software side, we develop an integrated perception and localization framework that combines stereo vision, object detection, and landmark-based fusion to provide reliable estimates of the ball, goals, teammates, and opponents. A mid-level navigation stack then generates collision-aware, dynamically feasible trajectories, while a centralized behavior manager coordinates high-level decision making, role selection, and kick execution based on the evolving game state. The seamless integration of these subsystems results in fast, precise, and tactically effective gameplay, enabling robust performance under the dynamic and adversarial conditions of real matches. This paper presents the design principles, system architecture, and experimental results that contributed to ARTEMIS's success as the 2024 Adult-Sized Humanoid Soccer champion.