Semantic Trajectory Generation for Goal-Oriented Spacecraft Rendezvous
作者: Yuji Takubo, Arpit Dwivedi, Sukeerth Ramkumar, Luis A. Pabon, Daniele Gammelli, Marco Pavone, Simone D'Amico
分类: cs.RO, cs.AI, math.OC
发布日期: 2025-12-09 (更新: 2025-12-11)
备注: 28 pages, 12 figures. Submitted to AIAA SCITECH 2026
💡 一句话要点
提出SAGES框架,通过自然语言指令生成满足约束的航天器交会对接轨迹。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 航天器交会对接 轨迹生成 自然语言处理 语义理解 约束优化
📋 核心要点
- 现有航天器轨迹优化方法依赖大量专家输入,限制了实际交会对接任务中的可扩展性。
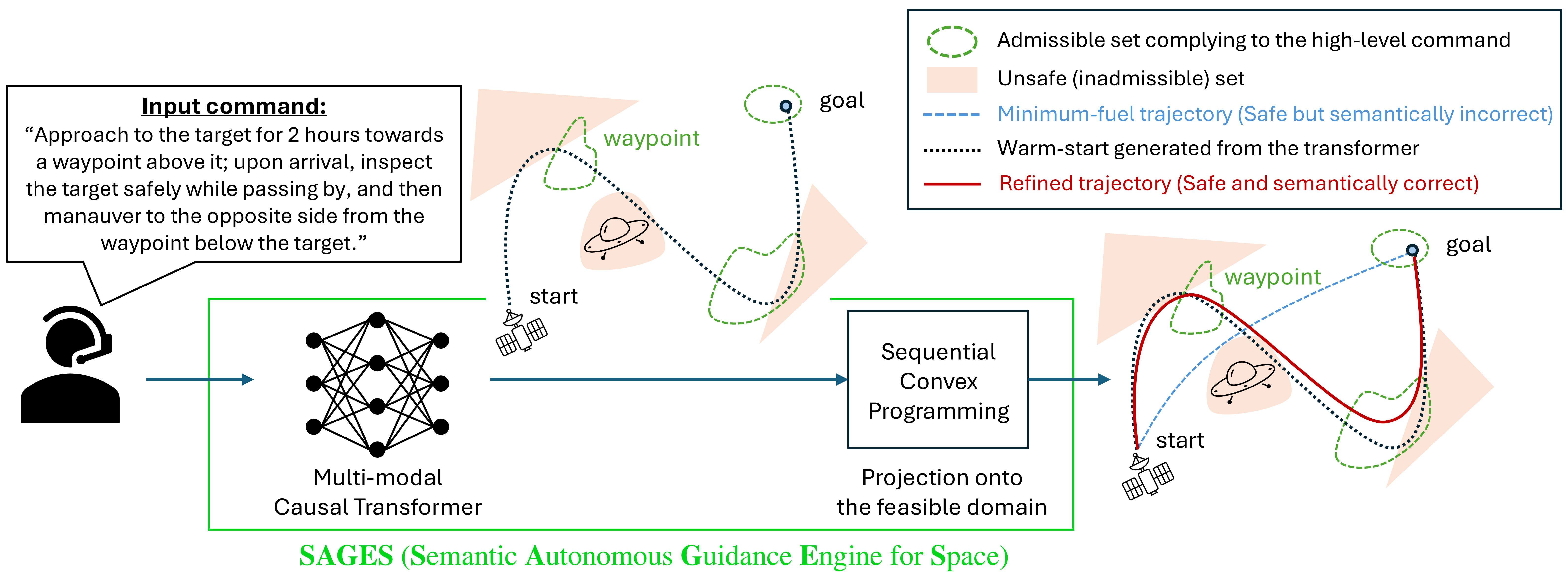
- SAGES框架将自然语言命令转化为航天器轨迹,反映高级意图并满足非凸约束。
- 实验表明SAGES能可靠生成与人类指令对齐的轨迹,语义-行为一致性超过90%。
📝 摘要(中文)
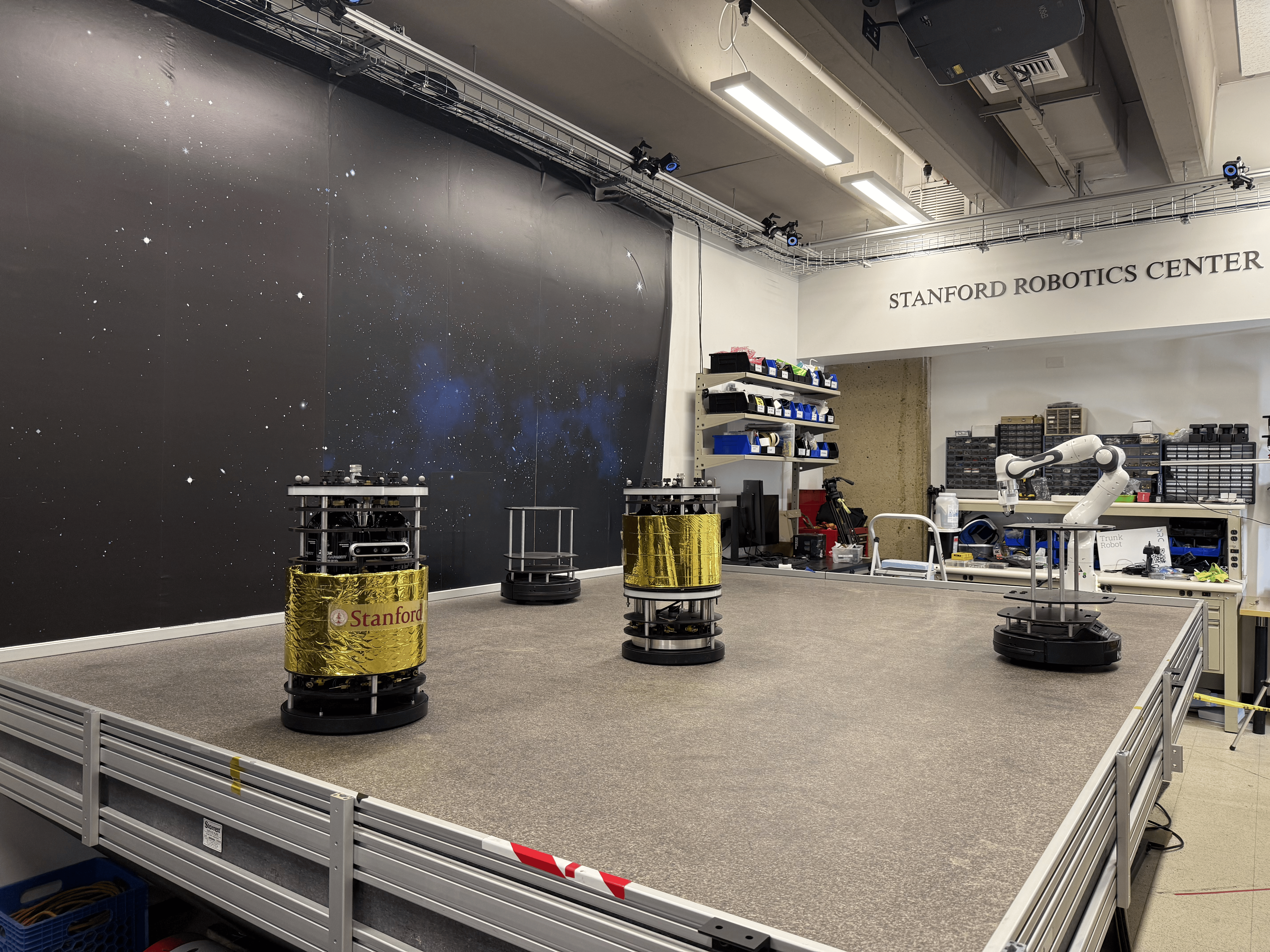
本文提出了一种名为SAGES(Semantic Autonomous Guidance Engine for Space)的轨迹生成框架,旨在将自然语言命令转化为满足非凸约束的航天器轨迹。该框架能够反映高级别的任务意图,并减少专家的人工干预。实验在两种场景下进行:一是具有连续时间约束执行的容错近距离操作,二是自由飞行机器人平台。实验结果表明,SAGES能够可靠地生成与人类指令对齐的轨迹,并在不同的行为模式下实现了超过90%的语义-行为一致性。这项工作是朝着语言条件下的、约束感知的航天器轨迹生成迈出的初步一步,使操作人员能够通过直观的自然语言命令交互式地指导安全性和行为,从而降低了专家的负担。
🔬 方法详解
问题定义:现有航天器轨迹生成方法需要大量专家手动输入,例如航路点、约束条件和任务时间表等,这限制了其在复杂和动态的实际任务中的应用。如何减少对专家知识的依赖,并使航天器能够根据高级别的任务指令自主生成轨迹,是一个关键问题。
核心思路:SAGES的核心思路是将自然语言命令作为输入,通过语义理解和轨迹规划,生成满足约束条件的航天器轨迹。这种方法旨在弥合人类高级意图和航天器底层控制之间的差距,使操作人员能够通过更直观的方式控制航天器。
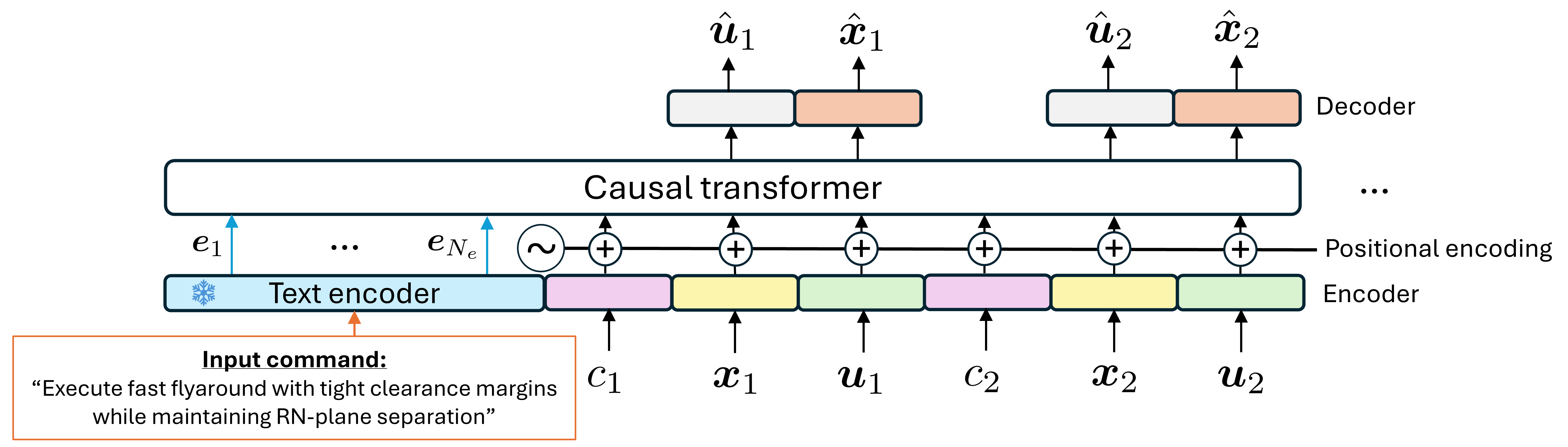
技术框架:SAGES框架包含以下主要模块:1) 自然语言处理模块,用于解析和理解人类输入的自然语言命令;2) 语义映射模块,将自然语言命令映射到航天器行为模式和约束条件;3) 轨迹生成模块,基于语义映射的结果,生成满足约束条件的航天器轨迹;4) 约束验证模块,验证生成的轨迹是否满足所有约束条件。整个流程是将人类指令转化为机器可执行的轨迹。
关键创新:SAGES的关键创新在于将自然语言处理技术应用于航天器轨迹生成领域,实现了语言条件下的轨迹规划。这使得操作人员能够通过自然语言命令直接控制航天器,而无需手动指定航路点和约束条件。此外,SAGES还能够处理非凸约束,使其能够应用于更复杂的任务场景。
关键设计:SAGES框架的具体技术细节包括:使用预训练的语言模型进行语义理解,使用基于优化的轨迹生成方法生成满足约束的轨迹,以及使用连续时间约束执行方法确保轨迹的安全性。具体的损失函数和网络结构等细节在论文中可能未详细描述,属于未知信息。
🖼️ 关键图片
📊 实验亮点
实验结果表明,SAGES能够可靠地生成与人类指令对齐的轨迹,并在不同的行为模式下实现了超过90%的语义-行为一致性。在容错近距离操作和自由飞行机器人平台上的实验验证了SAGES的有效性和鲁棒性。这些结果表明,SAGES是朝着语言条件下的、约束感知的航天器轨迹生成迈出的重要一步。
🎯 应用场景
SAGES框架可应用于各种航天器自主任务,例如在轨服务、碎片清除、行星探测等。它能够降低操作人员的负担,提高任务的灵活性和效率。未来,该技术有望应用于更复杂的航天任务,例如多航天器协同和自主决策。
📄 摘要(原文)
Reliable real-time trajectory generation is essential for future autonomous spacecraft. While recent progress in nonconvex guidance and control is paving the way for onboard autonomous trajectory optimization, these methods still rely on extensive expert input (e.g., waypoints, constraints, mission timelines, etc.), which limits the operational scalability in real rendezvous missions. This paper introduces SAGES (Semantic Autonomous Guidance Engine for Space), a trajectory-generation framework that translates natural-language commands into spacecraft trajectories that reflect high-level intent while respecting nonconvex constraints. Experiments in two settings -- fault-tolerant proximity operations with continuous-time constraint enforcement and a free-flying robotic platform -- demonstrate that SAGES reliably produces trajectories aligned with human commands, achieving over 90% semantic-behavioral consistency across diverse behavior modes. Ultimately, this work marks an initial step toward language-conditioned, constraint-aware spacecraft trajectory generation, enabling operators to interactively guide both safety and behavior through intuitive natural-language commands with reduced expert burden.