A Multi-Robot Platform for Robotic Triage Combining Onboard Sensing and Foundation Models
作者: Jason Hughes, Marcel Hussing, Edward Zhang, Shenbagaraj Kannapiran, Joshua Caswell, Kenneth Chaney, Ruichen Deng, Michaela Feehery, Agelos Kratimenos, Yi Fan Li, Britny Major, Ethan Sanchez, Sumukh Shrote, Youkang Wang, Jeremy Wang, Daudi Zein, Luying Zhang, Ruijun Zhang, Alex Zhou, Tenzi Zhouga, Jeremy Cannon, Zaffir Qasim, Jay Yelon, Fernando Cladera, Kostas Daniilidis, Camillo J. Taylor, Eric Eaton
分类: cs.RO
发布日期: 2025-12-09
备注: Technical Report for the DARPA Triage Challenge PRONTO team
💡 一句话要点
提出一种结合机载传感与基础模型的多机器人平台,用于灾难现场的机器人分诊
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多机器人系统 灾难响应 机器人分诊 无人机 无人车
📋 核心要点
- 现有方法在灾难现场分诊中存在局限,如依赖人工、效率低、安全性差,难以快速准确地评估伤情。
- 该系统利用无人机和无人车协同,无人机提供全局视野,无人车进行精细化检测,实现快速、安全的伤情评估。
- 该系统在DARPA分诊挑战赛中进行了验证,展示了多机器人系统在灾难响应中增强人类能力的潜力。
📝 摘要(中文)
本报告介绍了一种异构机器人系统,专为大规模伤亡事件(MCI)中的远程初步分诊而设计。该系统采用无人机(UAV)和无人地面车辆(UGV)组成的协同空地团队,用于定位受害者,评估其伤势,并在不危及急救人员生命的情况下确定医疗援助的优先级。无人机识别并提供伤亡人员的鸟瞰图,而配备专用传感器的UGV测量生命体征,并检测和定位身体损伤。与以往侧重于探索或有限医疗评估的工作不同,该系统解决了完整的分诊流程:受害者定位、生命体征测量、损伤严重程度分类、精神状态评估以及为急救人员提供的数据整合。作为DARPA分诊挑战赛的一部分,该方法展示了多机器人系统如何在灾难响应场景中增强人类能力,从而最大限度地挽救生命。
🔬 方法详解
问题定义:论文旨在解决大规模伤亡事件中,传统人工分诊效率低、安全性差的问题。现有方法通常依赖急救人员进入危险区域进行评估,耗时且可能造成二次伤害。此外,人工评估容易受到主观因素影响,难以保证准确性和一致性。
核心思路:论文的核心思路是利用多机器人协同系统,将急救人员从危险区域解放出来,通过无人机和无人车分别执行不同的任务,实现快速、安全、准确的伤情评估。无人机负责全局搜索和定位,无人车负责近距离检测和生命体征测量。
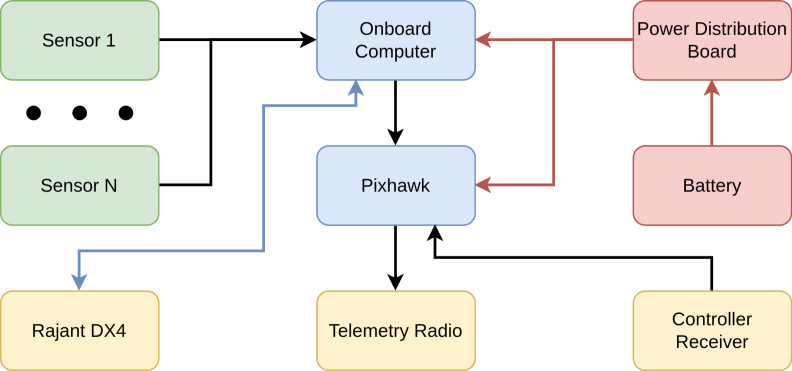
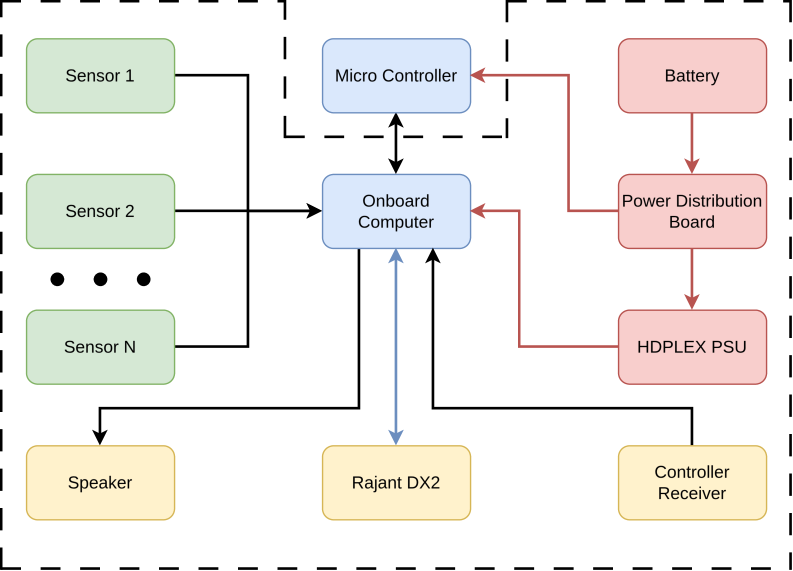
技术框架:该系统由无人机(UAV)和无人地面车辆(UGV)组成。无人机负责提供受害者位置的鸟瞰图,利用视觉算法进行人员检测和定位。无人车配备了多种传感器,包括生命体征监测仪、深度相机等,用于测量心率、呼吸频率等生命体征,并检测和定位身体损伤。系统还包括一个数据整合模块,将无人机和无人车收集的数据进行融合,生成综合的伤情报告,供急救人员参考。
关键创新:该系统的关键创新在于将无人机和无人车进行协同,实现空地一体化的分诊方案。无人机负责全局搜索和定位,无人车负责精细化检测和生命体征测量,充分发挥了各自的优势。此外,系统还集成了多种传感器和算法,能够进行全面的伤情评估,包括生命体征测量、损伤定位、精神状态评估等。
关键设计:无人机采用视觉算法进行人员检测和定位,具体算法细节未知。无人车配备的生命体征监测仪型号未知,深度相机用于获取伤员的3D信息,从而进行损伤定位。数据整合模块采用何种融合算法未知,但目标是生成综合的伤情报告,方便急救人员快速了解伤员情况。
🖼️ 关键图片

📊 实验亮点
该论文主要描述了系统设计,并未提供具体的实验数据。文中提到该系统是为DARPA分诊挑战赛设计的,但未给出比赛结果。因此,具体的性能数据、对比基线、提升幅度等未知。
🎯 应用场景
该研究成果可应用于各种灾难响应场景,如地震、火灾、恐怖袭击等。通过部署该多机器人系统,可以快速定位和评估伤员,提高救援效率,减少人员伤亡。此外,该系统还可以应用于军事医疗、远程医疗等领域,为偏远地区或危险环境提供医疗支持。
📄 摘要(原文)
This report presents a heterogeneous robotic system designed for remote primary triage in mass-casualty incidents (MCIs). The system employs a coordinated air-ground team of unmanned aerial vehicles (UAVs) and unmanned ground vehicles (UGVs) to locate victims, assess their injuries, and prioritize medical assistance without risking the lives of first responders. The UAV identify and provide overhead views of casualties, while UGVs equipped with specialized sensors measure vital signs and detect and localize physical injuries. Unlike previous work that focused on exploration or limited medical evaluation, this system addresses the complete triage process: victim localization, vital sign measurement, injury severity classification, mental status assessment, and data consolidation for first responders. Developed as part of the DARPA Triage Challenge, this approach demonstrates how multi-robot systems can augment human capabilities in disaster response scenarios to maximize lives saved.