Sim2Swim: Zero-Shot Velocity Control for Agile AUV Maneuvering in 3 Minutes
作者: Lauritz Rismark Fosso, Herman Biørn Amundsen, Marios Xanthidis, Sveinung Johan Ohrem
分类: cs.RO
发布日期: 2025-12-09
备注: 7 pages, 4 figures
💡 一句话要点
Sim2Swim:3分钟训练零样本水下机器人敏捷速度控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 水下机器人 深度强化学习 零样本迁移 领域随机化 速度控制
📋 核心要点
- 水下机器人控制面临复杂水动力学、参数不确定性和载荷变化等挑战,传统方法需针对特定平台和工况进行精细调整。
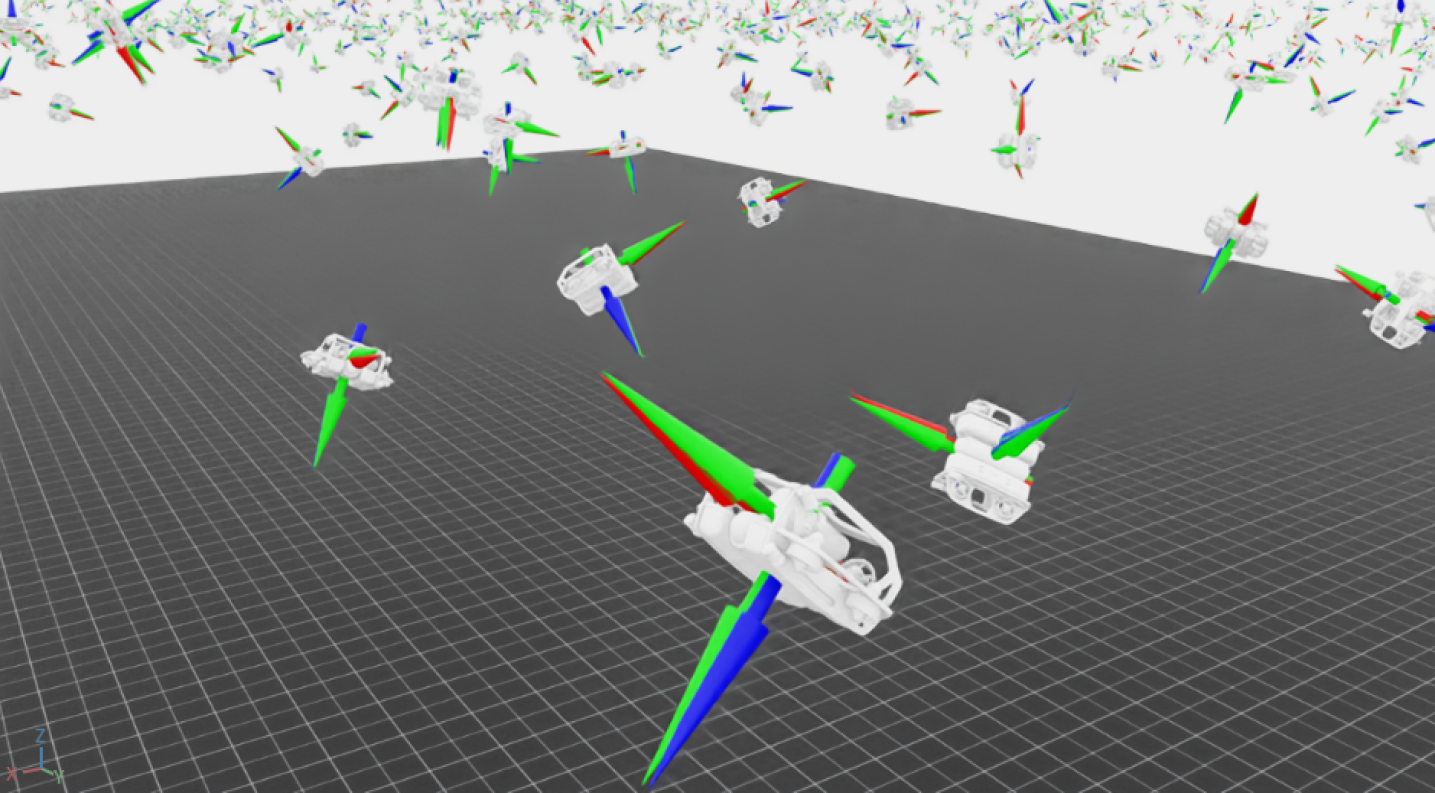
- Sim2Swim利用深度强化学习和领域随机化,在仿真环境中进行大规模并行训练,实现零样本迁移到真实水下环境的敏捷控制策略。
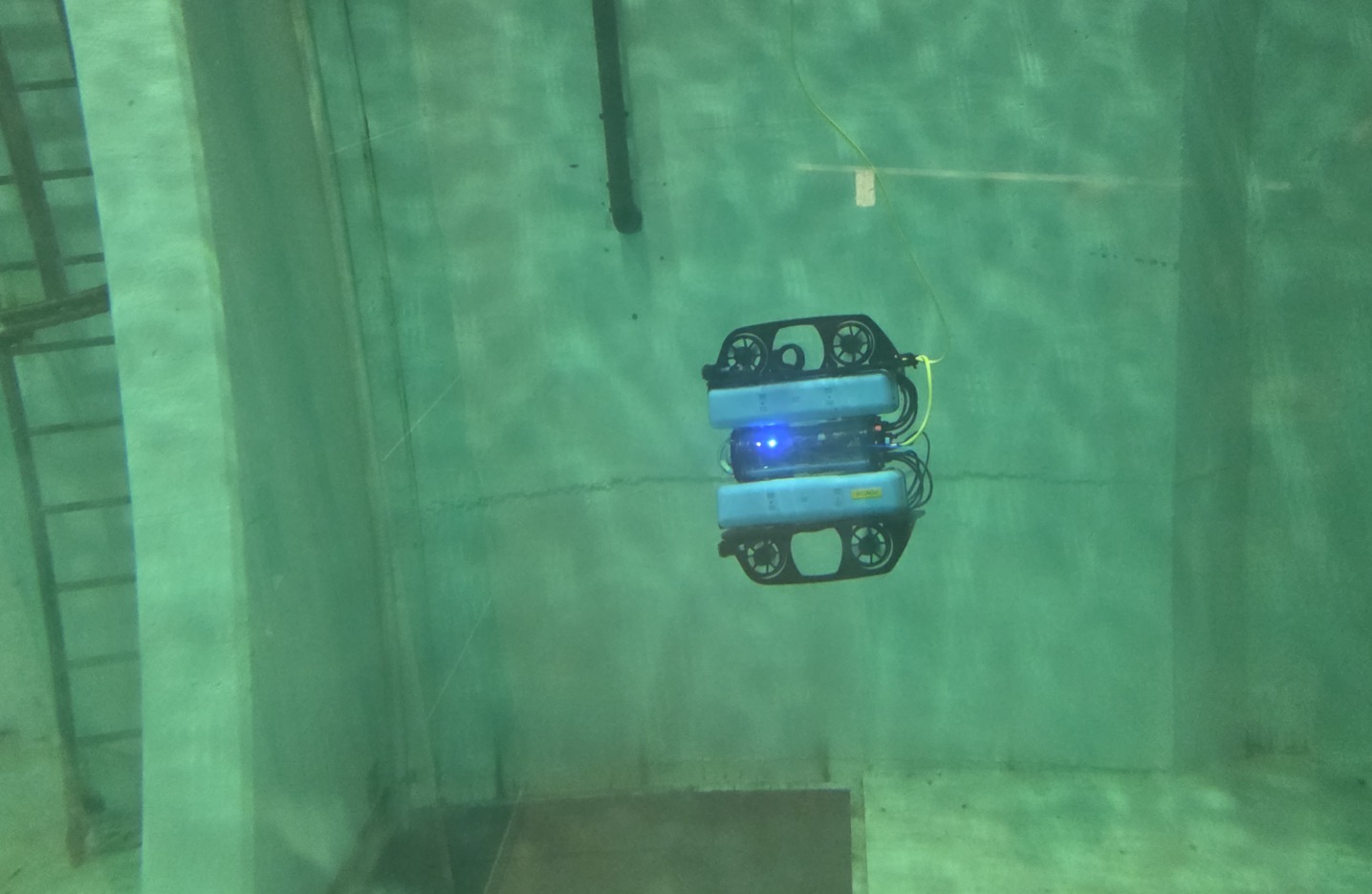
- 实验表明,Sim2Swim在多种配置下实现了鲁棒的敏捷运动控制,无需额外的后处理或参数调整,显著提升了部署效率。
📝 摘要(中文)
全向自主水下航行器(AUV)在平移和旋转自由度(DOF)上具有敏捷机动的硬件能力。然而,由于水下航行器固有的挑战,如复杂的水静力学和水动力学、参数不确定性以及有效载荷变化导致的频繁动力学变化,控制具有挑战性。性能通常依赖于针对独特平台配置的精心调整的控制器,并且需要在不同的有效载荷和水动力条件下重新调整。因此,在平移和旋转自由度上同时跟踪时变参考的敏捷机动在实践中很少使用。据我们所知,本文提出了第一个通用的基于零样本sim2real深度强化学习(DRL)的速度控制器,该控制器能够进行路径跟踪和敏捷的6自由度机动,训练时长仅为3分钟。Sim2Swim,所提出的方法,受到最先进的基于DRL的位置控制的启发,利用领域随机化和大规模并行化训练来收敛到可现场部署的控制策略,用于具有可变特性的AUV,无需后处理或调整。Sim2Swim在各种配置的池试验中得到了广泛的验证,展示了高度敏捷运动的鲁棒控制。
🔬 方法详解
问题定义:现有水下机器人的控制方法通常需要针对特定的平台配置和水动力条件进行精细的参数调整,难以适应有效载荷变化和复杂的水下环境。这限制了AUV在平移和旋转自由度上同时进行敏捷机动的能力,阻碍了其在实际应用中的广泛使用。
核心思路:Sim2Swim的核心思路是利用深度强化学习(DRL)在仿真环境中训练控制策略,并通过领域随机化技术使训练得到的策略能够零样本迁移到真实水下环境。通过在仿真中引入各种不确定性和变化,使智能体学习到对环境变化具有鲁棒性的控制策略。
技术框架:Sim2Swim的整体框架包括一个基于深度强化学习的智能体和一个水下机器人仿真环境。智能体通过与仿真环境交互学习控制策略。仿真环境利用领域随机化技术模拟真实水下环境的各种不确定性。训练完成后,将学习到的控制策略直接部署到真实水下机器人上,无需任何额外的调整。
关键创新:Sim2Swim的关键创新在于其零样本迁移能力和极短的训练时间。传统的sim2real方法通常需要大量的真实数据进行微调,而Sim2Swim通过领域随机化实现了零样本迁移,大大降低了部署成本。此外,通过大规模并行化训练,Sim2Swim能够在短短3分钟内完成训练,显著提高了训练效率。
关键设计:Sim2Swim使用了深度确定性策略梯度(DDPG)算法作为其强化学习算法。奖励函数的设计鼓励智能体跟踪目标速度,同时惩罚过大的控制输入。领域随机化包括随机化水动力参数、质量、重心位置等。网络结构采用多层感知机(MLP),输入为当前状态和目标速度,输出为控制力。
🖼️ 关键图片

📊 实验亮点
Sim2Swim在水池试验中验证了其鲁棒性和敏捷性。实验结果表明,该方法能够在各种配置下实现高度敏捷的运动控制,无需任何后处理或参数调整。值得注意的是,该控制策略仅通过3分钟的仿真训练即可实现,显著优于传统方法。
🎯 应用场景
Sim2Swim技术可广泛应用于水下机器人自主导航、目标跟踪、环境勘探等领域。其快速部署和零样本迁移能力降低了水下机器人应用门槛,使其能够更灵活地适应不同的任务需求和水下环境,具有重要的实际应用价值和广阔的发展前景。
📄 摘要(原文)
Holonomic autonomous underwater vehicles (AUVs) have the hardware ability for agile maneuvering in both translational and rotational degrees of freedom (DOFs). However, due to challenges inherent to underwater vehicles, such as complex hydrostatics and hydrodynamics, parametric uncertainties, and frequent changes in dynamics due to payload changes, control is challenging. Performance typically relies on carefully tuned controllers targeting unique platform configurations, and a need for re-tuning for deployment under varying payloads and hydrodynamic conditions. As a consequence, agile maneuvering with simultaneous tracking of time-varying references in both translational and rotational DOFs is rarely utilized in practice. To the best of our knowledge, this paper presents the first general zero-shot sim2real deep reinforcement learning-based (DRL) velocity controller enabling path following and agile 6DOF maneuvering with a training duration of just 3 minutes. Sim2Swim, the proposed approach, inspired by state-of-the-art DRL-based position control, leverages domain randomization and massively parallelized training to converge to field-deployable control policies for AUVs of variable characteristics without post-processing or tuning. Sim2Swim is extensively validated in pool trials for a variety of configurations, showcasing robust control for highly agile motions.