Learning Spatiotemporal Tubes for Temporal Reach-Avoid-Stay Tasks using Physics-Informed Neural Networks
作者: Ahan Basu, Ratnangshu Das, Pushpak Jagtap
分类: cs.RO
发布日期: 2025-12-09
💡 一句话要点
提出基于物理信息神经网络的时空管道学习方法,解决时序可达-避免-停留任务。
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 物理信息神经网络 时空管道 控制理论 机器人导航 时序任务
📋 核心要点
- 现有方法难以处理具有未知动力学和外部扰动的非线性系统,尤其是在满足时序可达-避免-停留(T-RAS)任务时。
- 该论文利用物理信息神经网络(PINN)学习时空管道(STT),通过优化损失函数来满足T-RAS任务的约束。
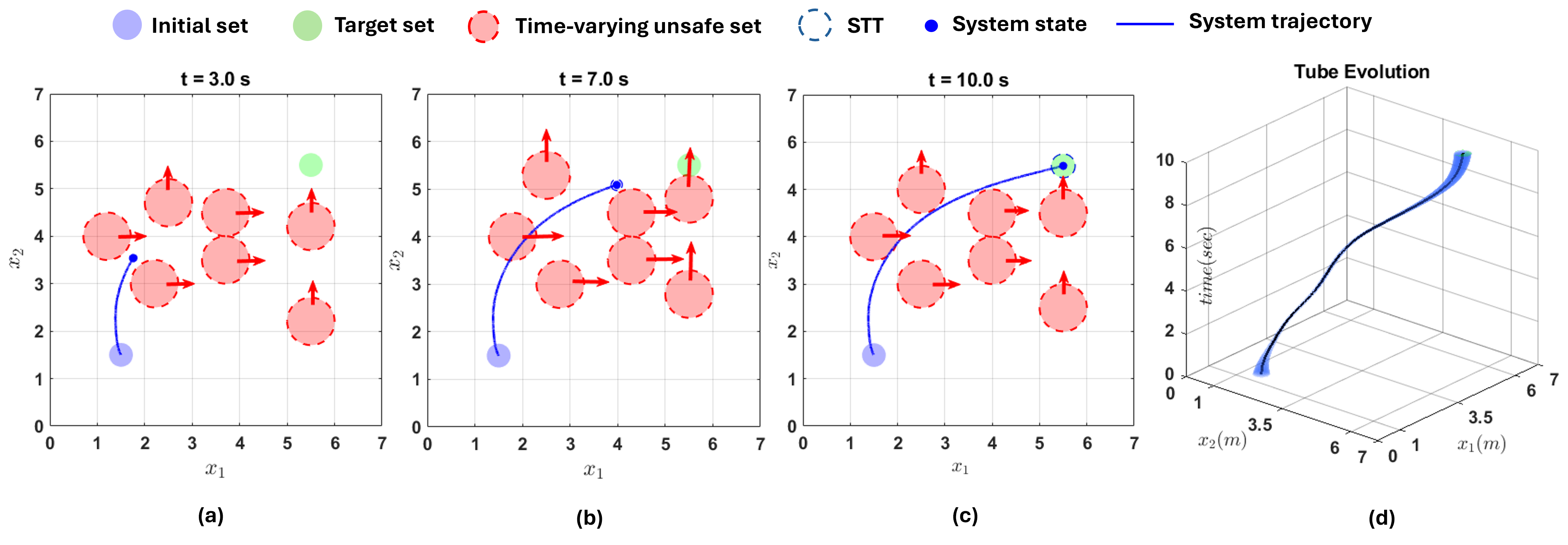
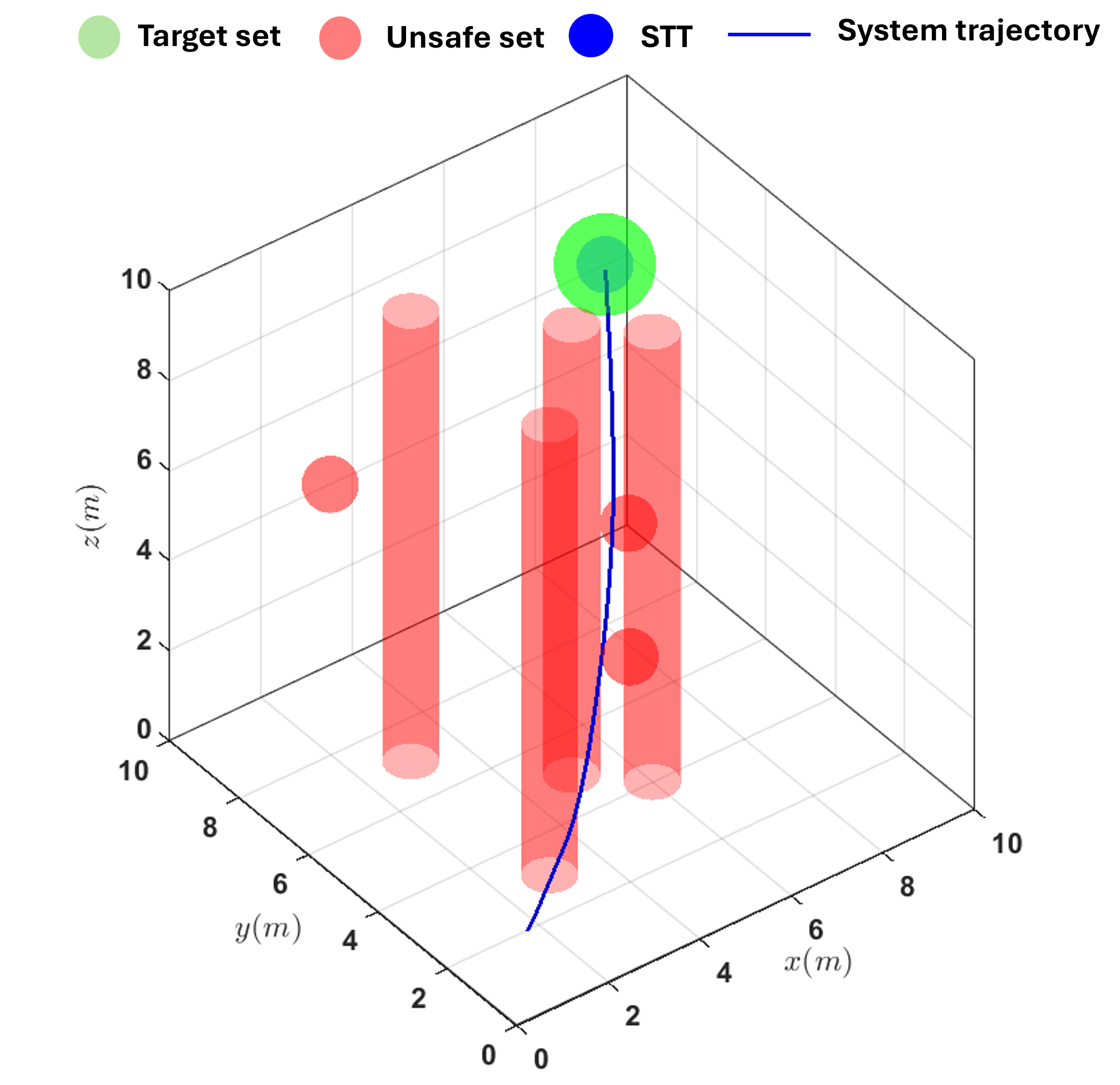
- 通过移动机器人和飞行器在复杂环境中的导航实验,验证了该框架的有效性和可扩展性。
📝 摘要(中文)
本文提出了一种基于时空管道(STT)的控制框架,用于解决具有未知动力学的一般控制仿射多输入多输出(MIMO)非线性纯反馈系统在外部扰动下满足预定的时间可达-避免-停留(T-RAS)任务。STT被定义为一个时变球,其中心和半径由物理信息神经网络(PINN)联合近似。首先,将控制STT的约束表示为PINN的损失函数,并提出了一种训练算法来最小化总体违反。由于PINN在某些配置点上进行训练,我们提出了一种基于Lipschitz的有效性条件,以正式验证学习到的PINN在连续时间范围内满足条件。基于学习到的STT表示,定义了一个无近似的闭环控制器,以保证满足T-RAS规范。最后,通过涉及移动机器人和飞行器在杂乱环境中导航的两个案例研究验证了该框架的有效性和可扩展性。
🔬 方法详解
问题定义:论文旨在解决具有未知动力学和外部扰动的控制仿射MIMO非线性纯反馈系统,在满足时序可达-避免-停留(T-RAS)任务时的控制问题。现有方法通常依赖于精确的系统模型或保守的近似,难以应对复杂环境和未知扰动,导致性能下降或安全性降低。
核心思路:核心思路是利用物理信息神经网络(PINN)学习一个时空管道(STT),该管道能够安全地引导系统状态,同时满足T-RAS任务的要求。通过将T-RAS任务的约束转化为PINN的损失函数,并进行优化,可以学习到满足约束的STT。
技术框架:整体框架包括以下几个主要步骤:1) 定义T-RAS任务;2) 将T-RAS任务的约束转化为STT的约束;3) 使用PINN近似STT的中心和半径;4) 将STT的约束转化为PINN的损失函数;5) 训练PINN以最小化损失函数;6) 使用学习到的STT设计控制器,保证系统满足T-RAS任务。
关键创新:关键创新在于使用PINN来学习STT,从而避免了对系统动力学的精确建模。此外,论文还提出了一种基于Lipschitz条件的验证方法,用于验证学习到的PINN在连续时间范围内满足约束。这种方法能够提供形式化的保证,确保系统的安全性。
关键设计:PINN的网络结构需要根据具体问题进行设计,通常包括输入层、隐藏层和输出层。损失函数的设计至关重要,需要包含T-RAS任务的约束,例如可达性、避免性和停留性。此外,还需要选择合适的优化算法和学习率,以保证PINN能够有效地学习到满足约束的STT。Lipschitz常数的估计和验证条件的设定也是重要的技术细节。
🖼️ 关键图片
📊 实验亮点
论文通过移动机器人和飞行器在复杂环境中的导航实验验证了该框架的有效性。实验结果表明,该方法能够成功地引导系统状态满足T-RAS任务的要求,并且具有良好的可扩展性。具体的性能数据和对比基线在论文中进行了详细的展示。
🎯 应用场景
该研究成果可应用于各种需要安全自主导航的场景,例如无人驾驶车辆、无人机、机器人等。特别是在复杂环境和存在未知扰动的情况下,该方法能够提供更可靠的控制策略,保证系统的安全性和任务完成度。未来可扩展到更复杂的任务和系统,例如多智能体协同控制。
📄 摘要(原文)
This paper presents a Spatiotemporal Tube (STT)-based control framework for general control-affine MIMO nonlinear pure-feedback systems with unknown dynamics to satisfy prescribed time reach-avoid-stay tasks under external disturbances. The STT is defined as a time-varying ball, whose center and radius are jointly approximated by a Physics-Informed Neural Network (PINN). The constraints governing the STT are first formulated as loss functions of the PINN, and a training algorithm is proposed to minimize the overall violation. The PINN being trained on certain collocation points, we propose a Lipschitz-based validity condition to formally verify that the learned PINN satisfies the conditions over the continuous time horizon. Building on the learned STT representation, an approximation-free closed-form controller is defined to guarantee satisfaction of the T-RAS specification. Finally, the effectiveness and scalability of the framework are validated through two case studies involving a mobile robot and an aerial vehicle navigating through cluttered environments.