Embodied Tree of Thoughts: Deliberate Manipulation Planning with Embodied World Model
作者: Wenjiang Xu, Cindy Wang, Rui Fang, Mingkang Zhang, Lusong Li, Jing Xu, Jiayuan Gu, Zecui Zeng, Rui Chen
分类: cs.RO, cs.AI, cs.CV
发布日期: 2025-12-09
备注: Website at https://embodied-tree-of-thoughts.github.io
💡 一句话要点
提出EToT框架,利用具身世界模型实现更可靠的机器人操作规划
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 机器人操作规划 具身智能 世界模型 物理引擎 视觉语言模型
📋 核心要点
- 现有基于视频生成的世界模型在机器人操作规划中存在物理基础薄弱的问题,导致幻觉和长时程约束不一致。
- EToT利用物理引擎构建具身世界模型,结合先验分支和反射分支两种机制进行树搜索,提升规划的可靠性。
- 实验结果表明,EToT在短时程和长时程操作任务中均优于现有方法,能有效预测物理动态并适应失败。
📝 摘要(中文)
本文提出了一种名为具身思维树(EToT)的Real2Sim2Real规划框架,旨在解决机器人操作规划中世界模型,特别是视频生成模型,缺乏物理基础导致的幻觉和长时程物理约束不一致性问题。EToT利用基于物理的交互式数字孪生作为具身世界模型,将操作规划建模为通过两种协同机制扩展的树搜索:先验分支,基于语义和空间分析生成多样化的候选执行路径;反射分支,利用视觉语言模型(VLM)诊断模拟器中的执行失败,并通过纠正措施迭代地改进规划树。该框架通过将高层推理建立在物理模拟器中,确保生成的计划符合刚体动力学和碰撞约束。在多个短时程和长时程操作任务上的验证表明,EToT始终优于基线方法,能够有效地预测物理动力学并适应潜在的失败。
🔬 方法详解
问题定义:机器人操作规划旨在生成一系列动作,使机器人能够在环境中完成特定任务。现有的基于视频生成模型的世界模型虽然能够预测未来状态,但由于缺乏对物理规律的建模,容易产生不符合物理规律的预测,导致规划失败,尤其是在长时程任务中。现有方法难以保证生成计划的物理可行性,并且难以从失败中学习和改进。
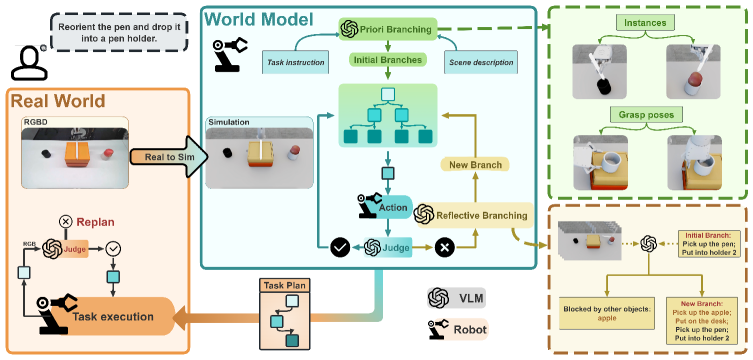
核心思路:EToT的核心思路是利用一个基于物理引擎的交互式数字孪生作为具身世界模型,从而保证规划的物理可行性。同时,通过先验分支和反射分支两种机制,探索和优化规划路径。先验分支利用语义和空间信息生成初始候选路径,反射分支则利用视觉语言模型诊断模拟器中的失败,并提出纠正措施,迭代改进规划树。这种Real2Sim2Real的框架能够有效地将模拟器中的经验迁移到真实世界。
技术框架:EToT框架主要包含以下几个模块:1)具身世界模型:一个基于物理引擎的交互式数字孪生,用于模拟机器人的操作过程和环境的物理动态。2)先验分支:基于语义和空间分析,生成多样化的候选执行路径。3)反射分支:利用视觉语言模型(VLM)诊断模拟器中的执行失败,并提出纠正措施。4)树搜索算法:用于在规划树中搜索最优的执行路径。整个流程是,首先通过先验分支生成初始的规划树,然后在模拟器中执行这些规划,如果执行失败,则通过反射分支诊断失败原因并提出纠正措施,然后将这些纠正措施添加到规划树中,继续搜索,直到找到一个成功的规划。
关键创新:EToT的关键创新在于:1)利用物理引擎构建具身世界模型,保证了规划的物理可行性。2)提出了先验分支和反射分支两种机制,能够有效地探索和优化规划路径。3)利用视觉语言模型诊断模拟器中的失败,并提出纠正措施,实现了从失败中学习和改进的能力。与现有方法相比,EToT更加注重物理规律的建模和从失败中学习的能力。
关键设计:EToT的关键设计包括:1)物理引擎的选择:需要选择一个能够准确模拟机器人操作过程和环境物理动态的物理引擎。2)先验分支的实现:需要设计一种有效的算法,能够基于语义和空间信息生成多样化的候选执行路径。3)反射分支的实现:需要选择一个合适的视觉语言模型,并设计一种有效的算法,能够诊断模拟器中的执行失败,并提出纠正措施。4)树搜索算法的选择:需要选择一种高效的树搜索算法,能够在规划树中快速搜索最优的执行路径。具体的参数设置、损失函数、网络结构等技术细节在论文中未详细说明,属于未知信息。
🖼️ 关键图片

📊 实验亮点
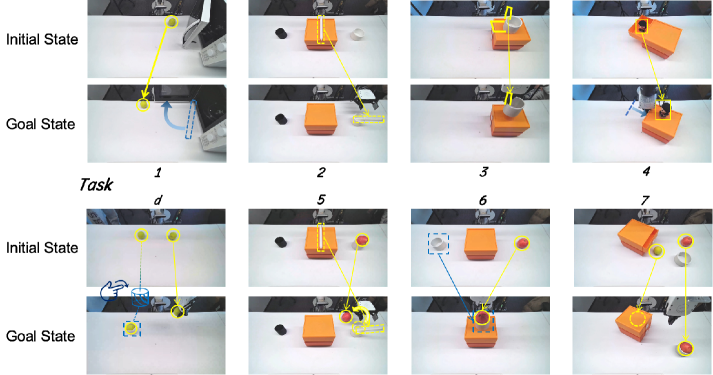
EToT在多个短时程和长时程操作任务上进行了验证,实验结果表明,EToT始终优于基线方法,能够有效地预测物理动力学并适应潜在的失败。具体的性能数据和提升幅度在论文中未详细给出,属于未知信息。但总体而言,EToT展示了其在机器人操作规划方面的优越性能。
🎯 应用场景
EToT框架具有广泛的应用前景,可应用于各种需要机器人操作的场景,例如:工业自动化、家庭服务、医疗康复等。通过利用物理引擎和视觉语言模型,EToT能够生成更加可靠和高效的机器人操作计划,从而提高生产效率和服务质量。未来,EToT有望成为机器人操作规划领域的重要技术。
📄 摘要(原文)
World models have emerged as a pivotal component in robot manipulation planning, enabling agents to predict future environmental states and reason about the consequences of actions before execution. While video-generation models are increasingly adopted, they often lack rigorous physical grounding, leading to hallucinations and a failure to maintain consistency in long-horizon physical constraints. To address these limitations, we propose Embodied Tree of Thoughts (EToT), a novel Real2Sim2Real planning framework that leverages a physics-based interactive digital twin as an embodied world model. EToT formulates manipulation planning as a tree search expanded through two synergistic mechanisms: (1) Priori Branching, which generates diverse candidate execution paths based on semantic and spatial analysis; and (2) Reflective Branching, which utilizes VLMs to diagnose execution failures within the simulator and iteratively refine the planning tree with corrective actions. By grounding high-level reasoning in a physics simulator, our framework ensures that generated plans adhere to rigid-body dynamics and collision constraints. We validate EToT on a suite of short- and long-horizon manipulation tasks, where it consistently outperforms baselines by effectively predicting physical dynamics and adapting to potential failures. Website at https://embodied-tree-of-thoughts.github.io .