AMBER: Aerial deployable gripping crawler with compliant microspine for canopy manipulation
作者: P. A. Wigner, L. Romanello, A. Hammad, P. H. Nguyen, T. Lan, S. F. Armanini, B. B. Kocer, M. Kovac
分类: cs.RO
发布日期: 2025-12-08
💡 一句话要点
AMBER:一种可空中部署的抓取履带机器人,用于树冠操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 树冠机器人 空中部署 柔顺微刺 环境采样 生态监测
📋 核心要点
- 现有生态监测手段难以兼顾效率与覆盖范围,尤其在复杂树冠环境中。
- AMBER采用柔顺微刺履带、旋转夹持器和弹性尾部,实现稳定抓取和灵活运动。
- 实验验证了AMBER在不同倾斜角度下的抓取和攀爬能力,以及低功耗特性。
📝 摘要(中文)
本文提出了一种可空中部署的履带机器人,旨在实现树冠内的自适应运动和操作。该系统结合了基于柔顺微刺的履带、双履带旋转夹持器和弹性尾部,从而能够在不同曲率和倾斜度的树枝上实现牢固的附着和稳定的移动。实验表明,该机器人能够在高达90度的身体侧倾和倾斜角度下可靠地抓取,并在高达67.5度倾斜的树枝上有效攀爬,在水平树枝上达到每秒0.55个身长的最大速度。柔顺的履带允许高达10度的偏航转向,从而增强了在不规则表面上的机动性。功耗测量表明,其无量纲运输成本比空中机器人的典型悬停功耗低一个数量级以上。该履带机器人集成在无人机系绳部署系统中,为环境采样和树冠内传感提供了一个稳健、低功耗的平台,弥合了空中和地面生态机器人之间的差距。
🔬 方法详解
问题定义:现有生态监测方法在复杂树冠环境中存在局限性,例如人工攀爬效率低、覆盖范围有限,而传统无人机悬停功耗高、难以长时间作业。因此,需要一种能够在树冠中自主移动、进行环境采样和传感的低功耗机器人。
核心思路:AMBER的核心思路是结合空中部署和地面移动的优势,利用无人机将履带机器人部署到树冠中,然后通过柔顺的微刺履带和旋转夹持器实现稳定的抓取和灵活的运动。弹性尾部则用于辅助平衡和稳定。
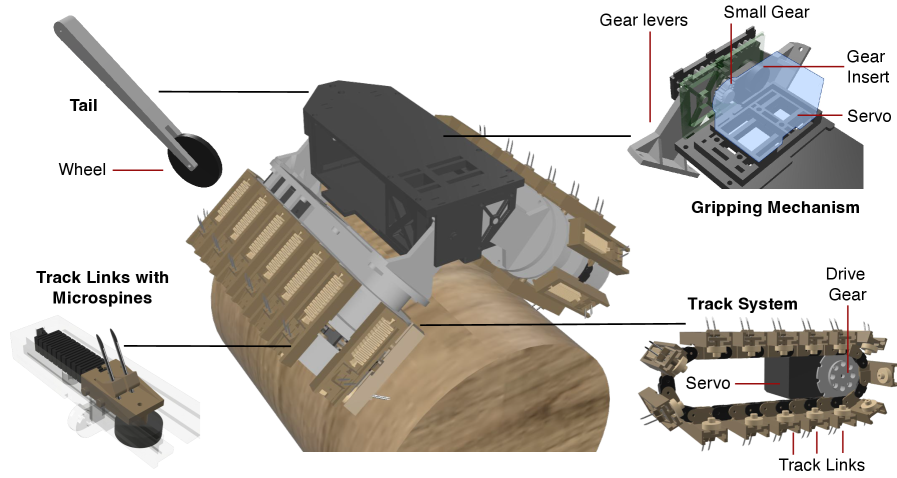
技术框架:AMBER系统主要包括三个部分:1)基于柔顺微刺的履带,用于提供抓地力和适应不同形状的树枝;2)双履带旋转夹持器,用于抓取树枝并进行转向;3)弹性尾部,用于辅助平衡和稳定。整个系统通过系绳与无人机连接,实现空中部署和供电。
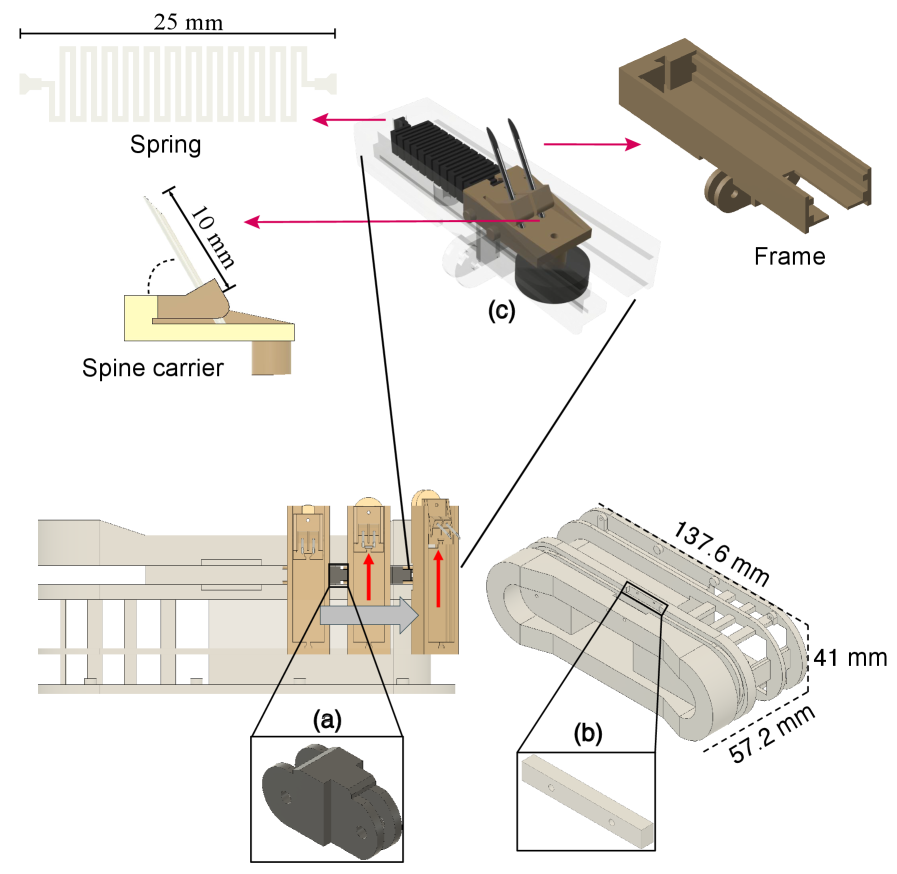
关键创新:AMBER的关键创新在于其独特的运动方式和机构设计。柔顺微刺履带能够适应不同形状和粗糙度的树枝表面,提供可靠的抓地力。双履带旋转夹持器则允许机器人在树枝上进行灵活的转向和调整姿态。此外,弹性尾部的设计也提高了机器人的稳定性和适应性。
关键设计:柔顺微刺履带的设计需要平衡抓地力和释放力,以确保机器人能够牢固地抓住树枝,同时又能够顺利地移动。旋转夹持器的控制算法需要精确地控制两个履带的速度和方向,以实现平稳的转向。弹性尾部的长度和弹性系数需要根据机器人的尺寸和重量进行优化,以实现最佳的平衡效果。
🖼️ 关键图片

📊 实验亮点
实验结果表明,AMBER能够在高达90度的侧倾和倾斜角度下可靠抓取,并在高达67.5度倾斜的树枝上有效攀爬。在水平树枝上,AMBER的最大速度达到0.55个身长/秒。此外,功耗测量显示,AMBER的无量纲运输成本比典型无人机悬停功耗低一个数量级以上,验证了其低功耗特性。
🎯 应用场景
AMBER可应用于森林生态监测、树冠环境采样、病虫害检测等领域。该机器人能够自主在树冠中移动,收集环境数据,为生态研究提供更全面、更高效的数据支持。未来,AMBER还可扩展到其他复杂环境,如城市高层建筑外墙检测等。
📄 摘要(原文)
This paper presents an aerially deployable crawler designed for adaptive locomotion and manipulation within tree canopies. The system combines compliant microspine-based tracks, a dual-track rotary gripper, and an elastic tail, enabling secure attachment and stable traversal across branches of varying curvature and inclination. Experiments demonstrate reliable gripping up to 90 degrees of body roll and inclination, while effective climbing on branches inclined up to 67.5 degrees, achieving a maximum speed of 0.55 body lengths per second on horizontal branches. The compliant tracks allow yaw steering of up to 10 degrees, enhancing maneuverability on irregular surfaces. Power measurements show efficient operation with a dimensionless cost of transport over an order of magnitude lower than typical hovering power consumption in aerial robots. Integrated within a drone-tether deployment system, the crawler provides a robust, low-power platform for environmental sampling and in-canopy sensing, bridging the gap between aerial and surface-based ecological robotics.