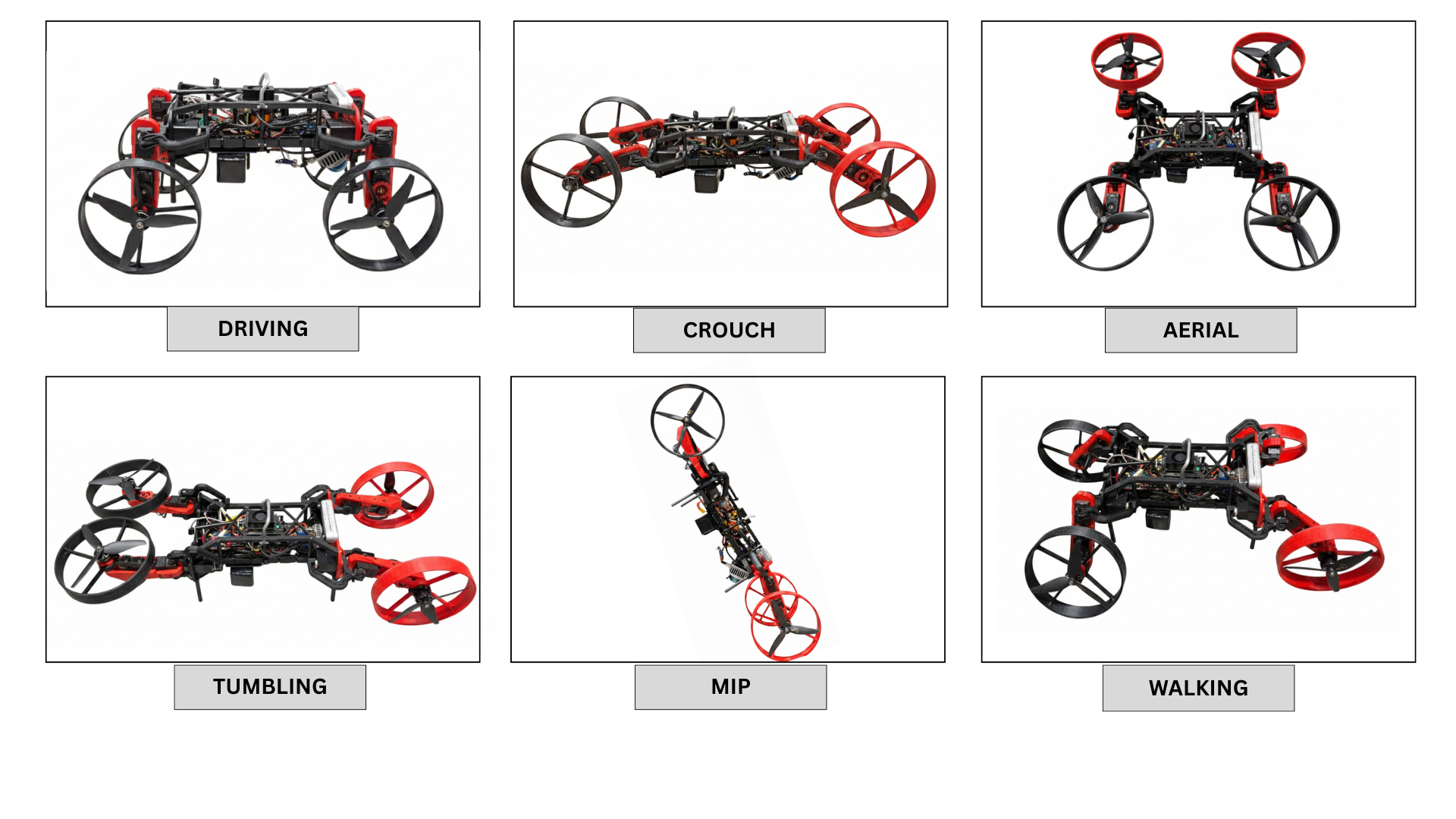
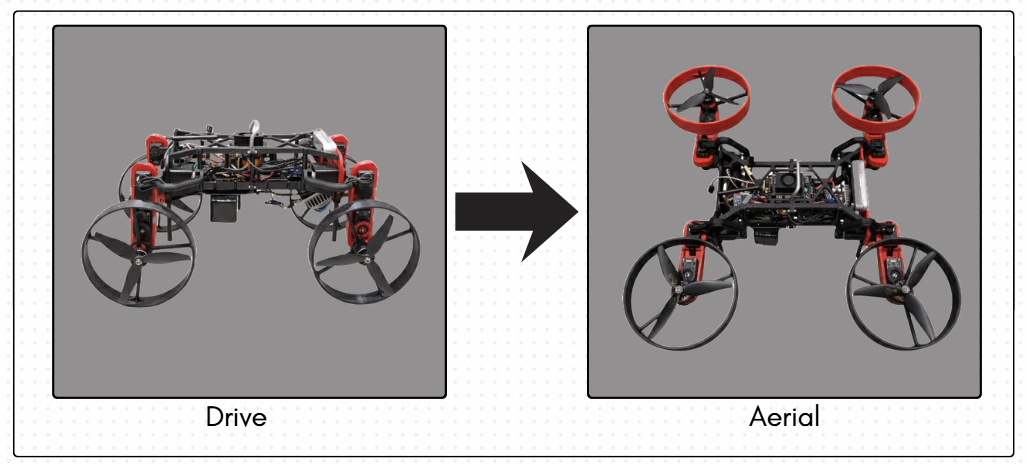
Traversability Aware Autonomous Navigation for Multi-Modal Mobility Morphobot (M4)
作者: Hrigved Mahesh Suryawanshi
分类: cs.RO, eess.SY
发布日期: 2025-12-07
备注: Master's thesis
💡 一句话要点
针对多地形机器人M4,提出可通行性感知自主导航方法。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 自主导航 地形可通行性 深度学习 路径规划 机器人 FAST-LIO A*算法
📋 核心要点
- 现有方法难以在非结构化环境中实时评估地形难度,导致机器人导航时效率和安全性难以兼顾。
- 利用学习到的地形分析,将地形可通行性转化为导航成本,通过定制A*规划器生成兼顾距离、能耗和地形质量的路径。
- 实验结果表明,该系统能够成功避开低可通行性区域,并通过增加少量路径长度来显著降低地形成本。
📝 摘要(中文)
在非结构化环境中进行自主导航需要机器人实时评估地形难度,并规划在效率和安全性之间取得平衡的路径。本论文提出了一种针对M4机器人平台的可通行性感知导航框架,该框架利用学习到的地形分析来生成节能路径,从而避开困难地形。该方法使用FAST-LIO进行实时定位,并从LiDAR点云生成2.5D高程图。一个基于CNN的模型处理这些高程图以估计可通行性得分,这些得分被转换为路径规划的导航成本。一个定制的A*规划器将这些成本与几何距离和能量消耗结合起来,以找到通过适度增加距离来换取地形质量大幅改善的路径。在系统开发之前,一项与平台无关的研究比较了基于LiDAR和基于相机的SLAM,使用了OptiTrack真值。通过ICP对齐的点云比较和云到网格距离分析表明,基于LiDAR的建图实现了厘米级的精度,这对于高程图至关重要,而基于相机的方法表现出明显更高的几何误差。这些发现直接导致选择LiDAR作为生成高程图的主要传感器。完整的流程集成了FAST-LIO定位、GPU加速的高程建图、基于CNN的可通行性估计以及具有定制可通行性感知规划器的Nav2导航。实验结果表明,该系统成功地避开了低可通行性区域,并通过接受一些更长的路径来实现地形成本的降低。这项工作为适用于多模态机器人平台的智能地形感知导航奠定了基础。
🔬 方法详解
问题定义:论文旨在解决多地形机器人(如M4)在非结构化环境中自主导航的问题。现有方法难以实时准确地评估地形的可通行性,导致机器人要么选择最短路径但面临高能耗和安全风险,要么过度保守地避开所有潜在危险区域,导致效率低下。因此,需要在效率、安全性和能耗之间找到平衡。
核心思路:论文的核心思路是利用深度学习方法,从LiDAR数据中学习地形的可通行性,并将可通行性信息融入到路径规划过程中。通过将地形可通行性转化为导航成本,引导机器人选择在可接受的距离增加范围内,尽可能选择更易于通过的地形,从而降低能耗和提高安全性。
技术框架:该导航框架主要包含以下几个模块:1) 使用FAST-LIO进行实时定位,生成精确的点云地图;2) 从点云地图生成2.5D高程图;3) 使用CNN模型处理高程图,估计地形的可通行性得分;4) 将可通行性得分转化为导航成本,并结合几何距离和能量消耗,使用定制的A*规划器进行路径规划;5) 使用Nav2导航系统进行控制和执行。
关键创新:该论文的关键创新在于将深度学习方法应用于地形可通行性估计,并将其与传统的路径规划算法相结合。与传统方法相比,该方法能够更准确地评估地形的复杂度和可通行性,从而生成更安全、更高效的导航路径。此外,该论文还通过实验验证了LiDAR在地形建图方面的优势,为后续研究提供了参考。
关键设计:在技术细节方面,论文使用了FAST-LIO进行实时定位,保证了地图的精度和实时性。CNN模型的具体结构未知,但其作用是根据高程图预测可通行性得分。定制的A*规划器的关键在于如何将可通行性得分转化为导航成本,以及如何平衡距离、能耗和地形质量之间的关系。这些参数的具体设置未知。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该系统能够成功避开低可通行性区域,并通过接受少量更长的路径来实现地形成本的降低。具体的地形成本降低百分比和路径长度增加百分比未知,但实验证明了该方法在实际应用中的有效性。此外,论文还对比了LiDAR和相机在地形建图方面的性能,验证了LiDAR在精度方面的优势。
🎯 应用场景
该研究成果可应用于各种需要在复杂非结构化环境中进行自主导航的机器人平台,例如搜救机器人、农业机器人、建筑机器人和巡检机器人。通过提高机器人在复杂地形下的导航能力,可以降低人工干预的需求,提高工作效率,并降低安全风险。未来,该技术还可以扩展到其他类型的传感器和机器人平台,实现更广泛的应用。
📄 摘要(原文)
Autonomous navigation in unstructured environments requires robots to assess terrain difficulty in real-time and plan paths that balance efficiency with safety. This thesis presents a traversability-aware navigation framework for the M4 robot platform that uses learned terrain analysis to generate energy-efficient paths avoiding difficult terrain.Our approach uses FAST-LIO for real-time localization, generating 2.5D elevation maps from LiDAR point clouds. A CNN-based model processes these elevation maps to estimate traversability scores, which are converted into navigation costs for path planning. A custom A* planner incorporates these costs alongside geometric distance and energy consumption to find paths that trade modest distance increases for substantial terrain quality improvements. Before system development, a platform-agnostic study compared LiDAR-based and camera-based SLAM using OptiTrack ground truth. Point cloud comparison through ICP alignment and cloud-to-mesh distance analysis demonstrated that LiDAR-based mapping achieves centimeter-level precision essential for elevation mapping, while camera-based approaches exhibited significantly higher geometric error. These findings directly resulted in the selection of LiDAR as the primary sensor to generate elevation maps. The complete pipeline integrates FAST-LIO localization, GPU-accelerated elevation mapping, CNN-based traversability estimation, and Nav2 navigation with a custom traversability-aware planner. Experimental results demonstrate that the system successfully avoids low traversability regions and accepts a few longer paths to achieve a reduction in terrain cost. This work establishes a foundation for intelligent terrain-aware navigation applicable to multi-modal robotic platforms.