Leveraging Port-Hamiltonian Theory for Impedance Control Benchmarking
作者: Leonardo F. Dos Santos, Elisa G. Vergamini, Cícero Zanette, Lucca Maitan, Thiago Boaventura
分类: cs.RO, eess.SY
发布日期: 2025-12-06
备注: This is the author's version of the paper accepted for publication in the 2025 International Conference on Advanced Robotics (ICAR). The final version will be available at IEEE Xplore
💡 一句话要点
提出基于Port-Hamiltonian理论的阻抗控制性能评估方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: Port-Hamiltonian系统 阻抗控制 性能评估 机器人控制 钝化 动态解耦 Gazebo仿真
📋 核心要点
- 现有阻抗控制缺乏统一的评估标准,难以客观比较不同控制器的性能优劣。
- 利用Port-Hamiltonian理论构建阻抗模型,推导出与传感器无关的钝化条件和阻抗保真度指标。
- 在Gazebo仿真环境中,验证了所提指标在六自由度机械臂和四足机器人腿上的有效性。
📝 摘要(中文)
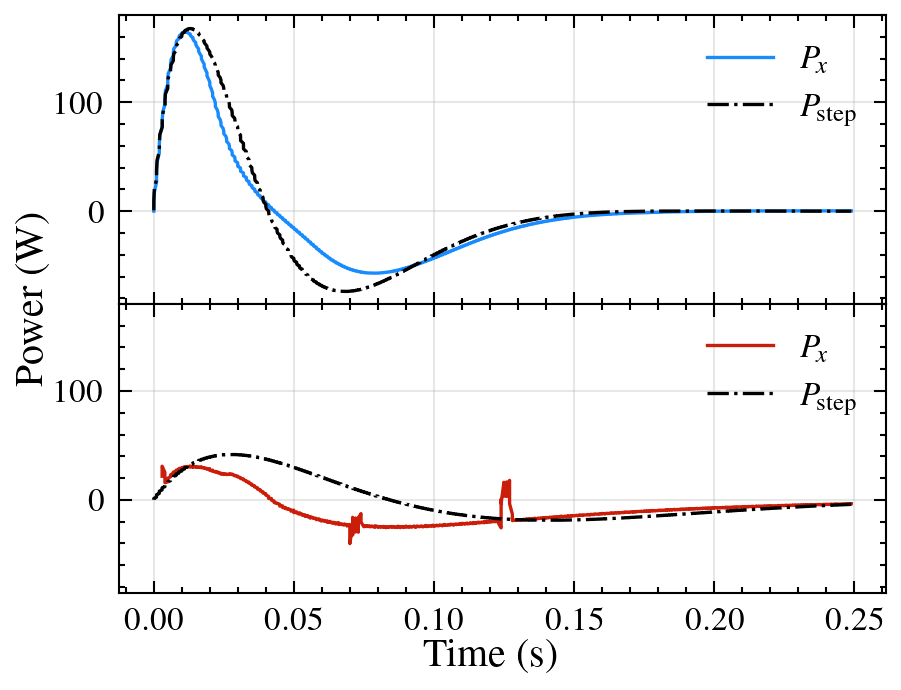
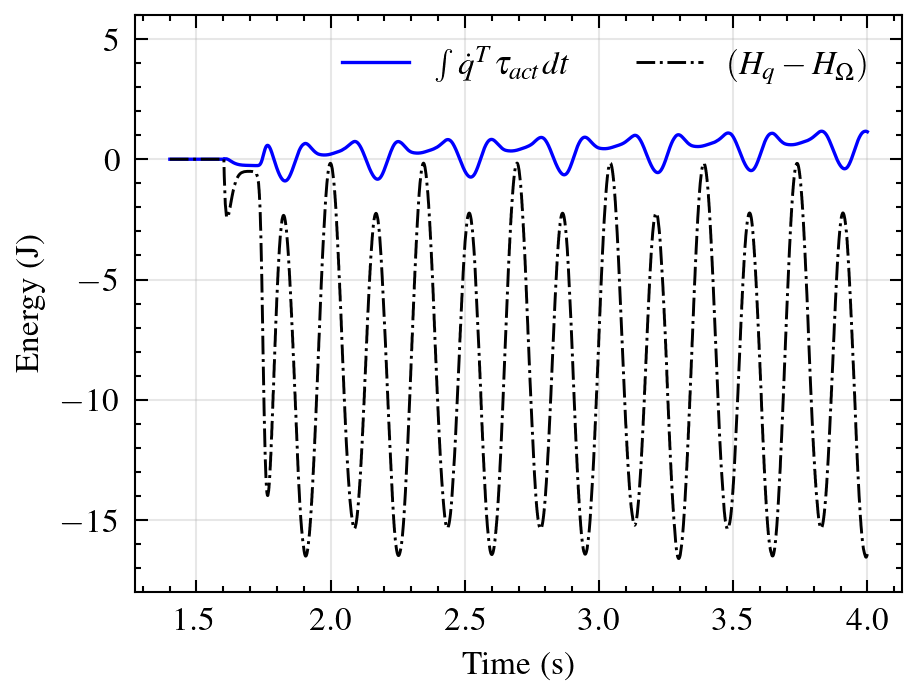
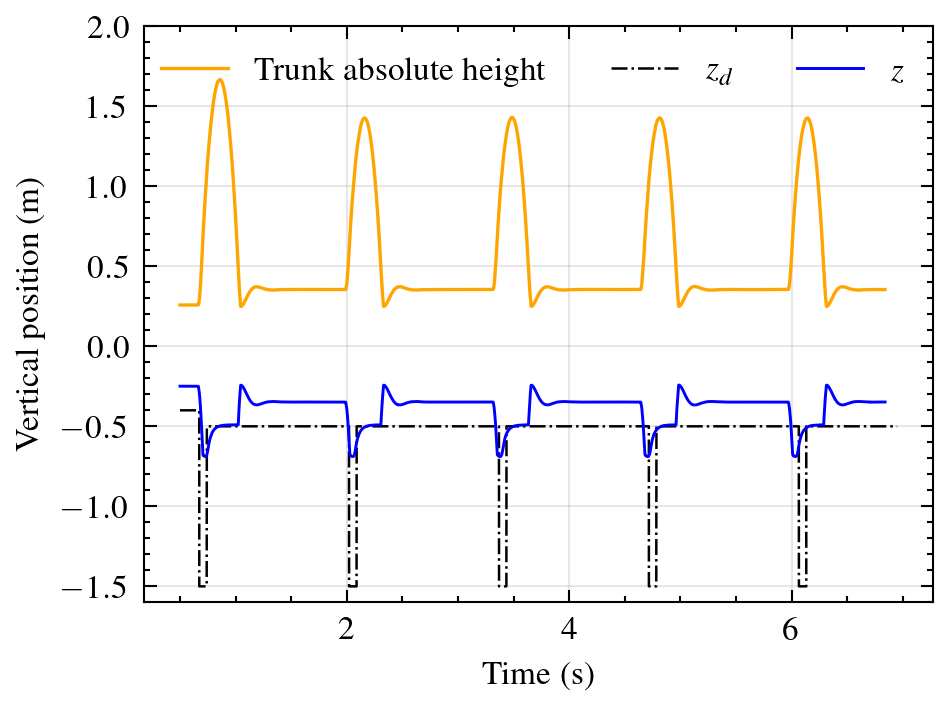
本文提出了一种基于Port-Hamiltonian (PH) 理论的阻抗控制性能评估方法。针对笛卡尔空间中的质量-弹簧-阻尼阻抗,引入了一个因果一致的PH模型。基于该模型,推导出一个可微的、与力/力矩传感无关的、n自由度钝化条件,该条件对时变参考有效。此外,还定义了一个阻抗保真度指标,该指标从自由运动中的阶跃响应功率捕获动态解耦特性。所提出的指标在Gazebo仿真中,通过一个六自由度机械臂和一个四足机器人腿进行了验证。结果表明,PH框架适用于标准化阻抗控制性能评估。
🔬 方法详解
问题定义:现有的阻抗控制方法缺乏一个标准化的评估框架,难以对不同控制器的性能进行客观比较。尤其是在多自由度机器人系统中,如何保证阻抗控制的稳定性和性能,以及如何有效地解耦各个自由度的动态特性,仍然是一个挑战。现有方法往往依赖于特定的传感器或复杂的计算,限制了其通用性和适用性。
核心思路:本文的核心思路是利用Port-Hamiltonian (PH) 理论来建模阻抗控制系统,并基于该模型推导出可用于评估阻抗控制性能的指标。PH理论提供了一种能量视角,可以保证系统的稳定性,并且能够自然地处理多自由度系统的耦合特性。通过分析系统的能量流动,可以推导出与传感器无关的钝化条件和阻抗保真度指标。
技术框架:本文的技术框架主要包括以下几个步骤:1) 构建笛卡尔空间中质量-弹簧-阻尼阻抗的PH模型;2) 基于该模型,推导出一个可微的、与力/力矩传感无关的、n自由度钝化条件,该条件对时变参考有效;3) 定义一个阻抗保真度指标,该指标从自由运动中的阶跃响应功率捕获动态解耦特性;4) 在Gazebo仿真环境中,通过一个六自由度机械臂和一个四足机器人腿验证所提出的指标。
关键创新:本文最重要的技术创新点在于提出了基于PH理论的阻抗控制性能评估指标,该指标具有以下优点:1) 与力/力矩传感无关,降低了对传感器的依赖;2) 适用于多自由度系统,能够处理自由度之间的耦合特性;3) 基于能量视角,能够保证系统的稳定性;4) 可微,便于优化和分析。与现有方法相比,该方法提供了一种更加通用、稳定和高效的阻抗控制性能评估方法。
关键设计:在构建PH模型时,关键在于选择合适的能量变量和互联结构,以保证模型的因果一致性。在推导钝化条件时,需要利用PH理论中的能量耗散特性,并将其转化为可微的约束条件。在定义阻抗保真度指标时,需要选择合适的阶跃响应功率作为评估标准,以捕获动态解耦特性。具体的参数设置和优化方法需要根据具体的机器人系统和控制目标进行调整。
🖼️ 关键图片
📊 实验亮点
在Gazebo仿真中,通过六自由度机械臂和四足机器人腿验证了所提指标的有效性。实验结果表明,该指标能够有效地评估不同阻抗控制器的性能,并能够捕获动态解耦特性。具体的性能数据和对比基线在论文中进行了详细的展示,证明了该方法在标准化阻抗控制性能评估方面的优势。
🎯 应用场景
该研究成果可应用于机器人阻抗控制器的设计、评估和优化。例如,在人机协作、医疗机器人、康复机器人等领域,可以利用该方法选择合适的阻抗控制器,提高机器人的安全性、稳定性和性能。此外,该方法还可以用于机器人教学和研究,为学生和研究人员提供一个标准化的阻抗控制性能评估框架。
📄 摘要(原文)
This work proposes PH-based metrics for benchmarking impedance control. A causality-consistent PH model is introduced for mass-spring-damper impedance in Cartesian space. Based on this model, a differentiable, force-torque sensing-independent, n-DoF passivity condition is derived, valid for time-varying references. An impedance fidelity metric is also defined from step-response power in free motion, capturing dynamic decoupling. The proposed metrics are validated in Gazebo simulations with a six-DoF manipulator and a quadruped leg. Results demonstrate the suitability of the PH framework for standardized impedance control benchmarking.