Real-Time Spatiotemporal Tubes for Dynamic Unsafe Sets
作者: Ratnangshu Das, Siddhartha Upadhyay, Pushpak Jagtap
分类: cs.RO, eess.SY
发布日期: 2025-12-05
💡 一句话要点
提出实时时空管道框架,解决动态环境中未知动力学系统的安全导航问题
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 时空管道 实时控制 动态环境 非线性系统 安全导航
📋 核心要点
- 现有方法难以在动态环境中,针对具有未知动力学的非线性系统,实现安全且准时的到达-避免-停留任务。
- 论文提出实时时空管道(STT)框架,通过在线调整管道中心和半径,约束系统输出,保证安全和任务完成。
- 通过移动机器人和无人机在动态环境中的仿真和硬件实验,验证了该框架的有效性和可扩展性。
📝 摘要(中文)
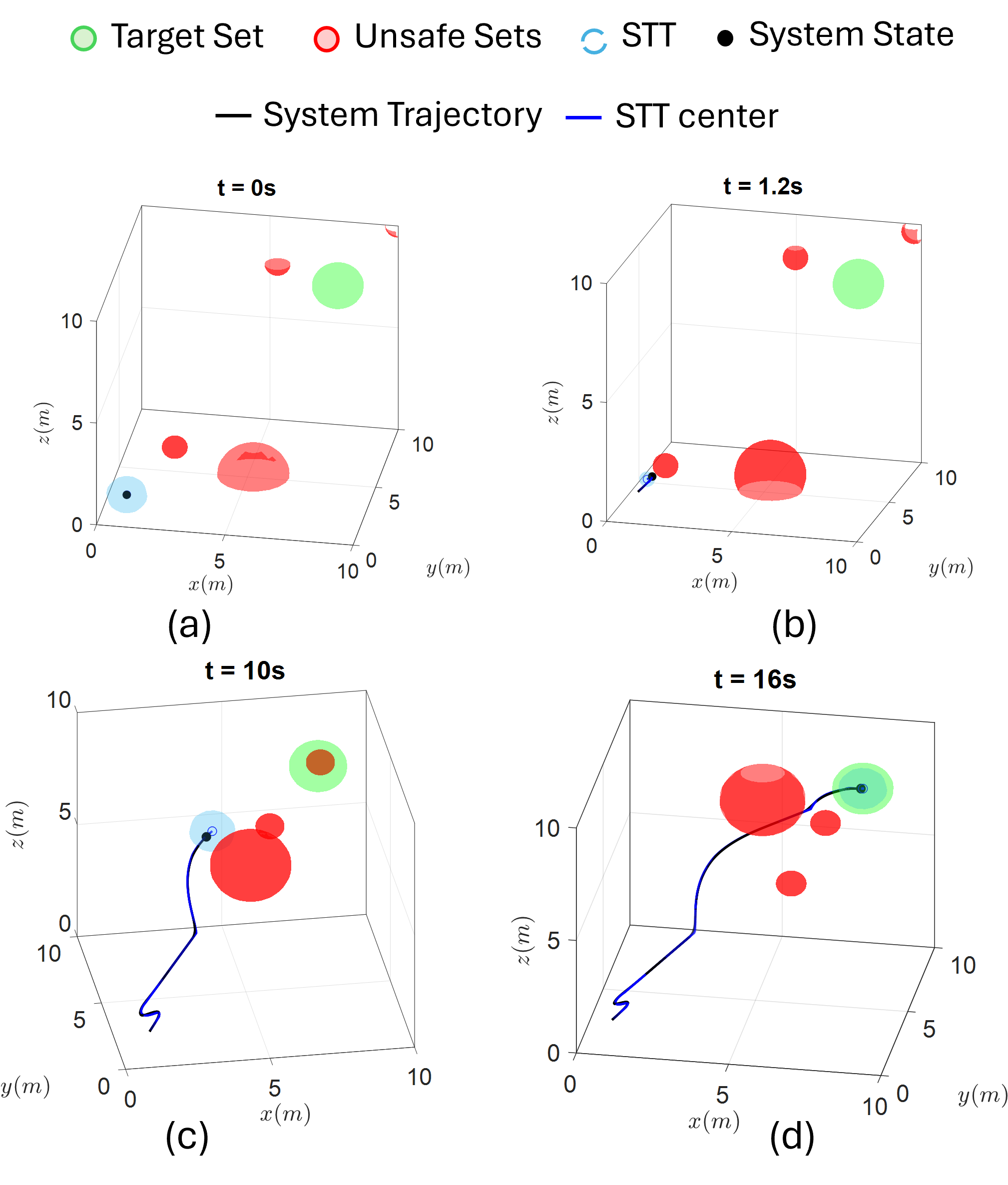
本文提出了一种针对具有未知动力学的非线性纯反馈系统的实时控制框架,旨在满足动态环境中预定时间内到达-避免-停留任务。为此,我们引入了一种实时时空管道(STT)框架。STT被定义为状态空间中一个随时间变化的球体,其中心和半径仅使用实时传感器输入进行在线调整。然后,推导出一个闭式、无近似的控制律,以将系统输出约束在STT内,从而确保安全性和任务完成。我们为避障和准时完成任务提供了形式化保证。通过在杂乱的动态环境中导航的移动机器人和无人机的仿真和硬件实验,证明了该框架的有效性和可扩展性。
🔬 方法详解
问题定义:论文旨在解决非线性纯反馈系统在动态环境中,动力学未知的情况下,如何安全、准时地完成到达-避免-停留任务。现有方法通常依赖于精确的动力学模型,或者难以适应动态变化的环境,导致安全性和实时性难以保证。
核心思路:论文的核心思路是构建一个随时间变化的“安全管道”(时空管道,STT),通过实时调整管道的中心和半径,确保系统状态始终位于安全区域内。同时,设计控制律,将系统输出约束在STT内,从而实现避障和准时到达目标。这种方法无需精确的动力学模型,能够适应动态环境的变化。
技术框架:该框架主要包含以下几个阶段:1) 环境感知:通过传感器获取环境信息,例如障碍物的位置和速度。2) STT生成:基于环境信息,在线调整STT的中心和半径,确保STT始终位于安全区域内。3) 控制律设计:设计闭式控制律,将系统输出约束在STT内,保证安全性和任务完成。4) 系统执行:控制系统驱动机器人或无人机执行任务。
关键创新:最重要的创新点在于提出了实时时空管道(STT)的概念,并设计了相应的控制框架。与传统的基于模型预测控制(MPC)的方法相比,该方法无需精确的动力学模型,计算复杂度更低,更适合实时控制。此外,该方法提供了形式化的安全性和任务完成保证。
关键设计:STT的中心和半径的调整策略是关键。论文可能采用某种优化算法或启发式规则,根据环境信息和系统状态,实时调整STT的参数。控制律的设计也至关重要,需要确保系统输出能够快速、准确地跟踪STT的边界,同时保证系统的稳定性。具体的参数设置、损失函数和网络结构等技术细节未知,需要查阅论文原文。
🖼️ 关键图片


📊 实验亮点
论文通过移动机器人和无人机在复杂动态环境中的仿真和硬件实验,验证了所提出框架的有效性和可扩展性。具体的性能数据(例如避障成功率、任务完成时间、控制精度等)和对比基线(例如传统MPC方法)未知,需要查阅论文原文。
🎯 应用场景
该研究成果可应用于各种需要在动态环境中安全导航的机器人系统,例如:自动驾驶汽车、无人机物流、仓储机器人、搜救机器人等。通过实时感知环境并调整安全管道,可以有效避免碰撞,提高任务完成效率,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
This paper presents a real-time control framework for nonlinear pure-feedback systems with unknown dynamics to satisfy reach-avoid-stay tasks within a prescribed time in dynamic environments. To achieve this, we introduce a real-time spatiotemporal tube (STT) framework. An STT is defined as a time-varying ball in the state space whose center and radius adapt online using only real-time sensory input. A closed-form, approximation-free control law is then derived to constrain the system output within the STT, ensuring safety and task satisfaction. We provide formal guarantees for obstacle avoidance and on-time task completion. The effectiveness and scalability of the framework are demonstrated through simulations and hardware experiments on a mobile robot and an aerial vehicle, navigating in cluttered dynamic environments.