Probabilistic Weapon Engagement Zones for a Turn Constrained Pursuer
作者: Grant Stagg, Isaac E. Weintraub, Cameron K. Peterson
分类: cs.RO, eess.SY
发布日期: 2025-12-05
备注: Accepted for presentation at AIAA SciTech 2026. 17 pages, 7 figures
💡 一句话要点
针对转弯约束追击者,提出概率武器交战区(CSPEZ)方法以降低规避风险
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 概率交战区 轨迹规划 不确定性传播 追逃博弈 运动规划
📋 核心要点
- 现有方法难以在追击者参数不确定情况下,有效评估规避者的安全区域,从而影响规避策略的制定。
- 论文核心在于构建曲线-直线概率交战区(CSPEZ),通过概率方法量化规避风险,指导规避者选择更安全的轨迹。
- 通过多种不确定性传播方法(蒙特卡罗、线性化等)评估CSPEZ,并集成到轨迹优化中,验证了其在不确定环境下的有效性。
📝 摘要(中文)
本文提出了一种曲线-直线概率交战区(CSPEZ)方法,用于量化规避者应避免的空间区域,以降低受到转弯速率受限的追击者捕获的风险。追击者遵循具有不确定参数(包括位置、航向、速度、范围和最大转弯速率)的曲线-直线路径。本文提出了生成规避者轨迹的方法,该轨迹可在这种不确定性下最大限度地降低捕获风险。我们首先推导出确定性曲线-直线基本交战区(CSBEZ)的解析解,然后使用四种不确定性传播方法将其扩展到概率框架:蒙特卡罗抽样、线性化、二次近似和神经网络回归。我们评估了每种近似方法的准确性和计算成本,并演示了如何将CSPEZ约束集成到轨迹优化算法中,以生成明确考虑追击者不确定性的安全路径。
🔬 方法详解
问题定义:论文旨在解决在追击者具有转弯约束且参数(如位置、航向、速度等)存在不确定性的情况下,如何为规避者规划安全轨迹的问题。现有方法通常基于确定性模型,无法有效应对追击者的不确定性,导致规避策略的鲁棒性较差。
核心思路:论文的核心思路是构建概率武器交战区(Probabilistic Weapon Engagement Zones, PEZ),特别是曲线-直线概率交战区(Curve-Straight Probabilistic Engagement Zones, CSPEZ)。通过考虑追击者参数的不确定性,将传统的确定性交战区扩展为概率形式,从而量化规避者在不同位置被捕获的风险。规避者可以根据CSPEZ选择风险较低的区域进行规避。
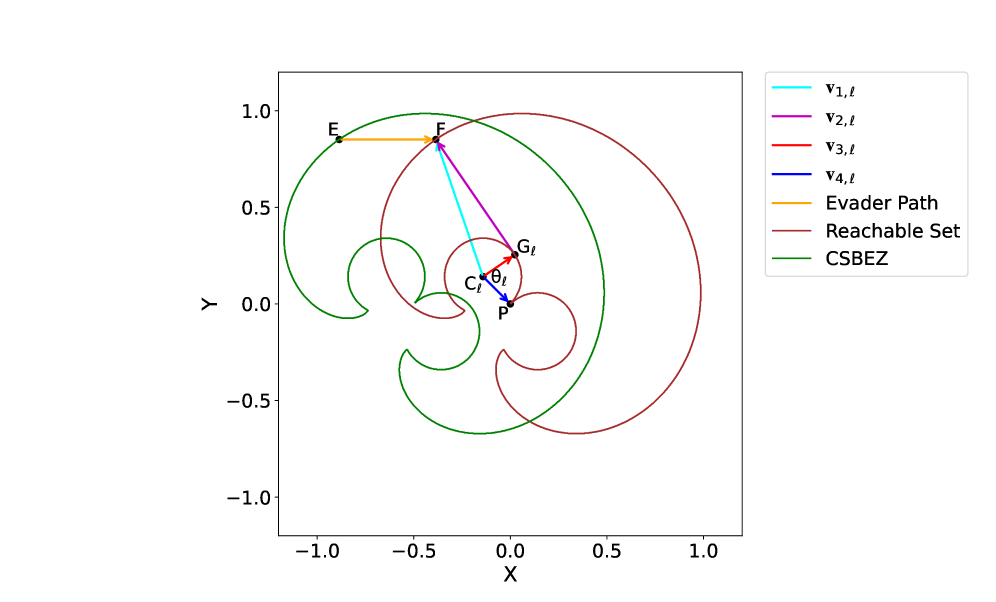
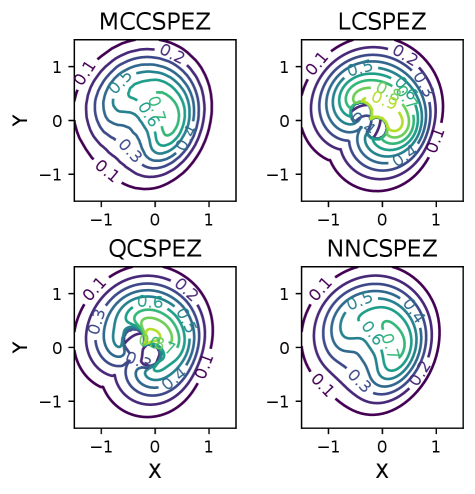
技术框架:整体框架包括以下几个主要阶段:1) 推导确定性曲线-直线基本交战区(CSBEZ)的解析解;2) 引入不确定性,将CSBEZ扩展为CSPEZ;3) 采用不同的不确定性传播方法(蒙特卡罗抽样、线性化、二次近似、神经网络回归)来近似计算CSPEZ;4) 将CSPEZ约束集成到轨迹优化算法中,生成安全轨迹。
关键创新:最重要的技术创新点在于将确定性的交战区概念扩展到概率域,从而能够处理追击者参数的不确定性。此外,论文比较了多种不确定性传播方法在计算CSPEZ时的准确性和计算成本,为实际应用提供了指导。与现有方法的本质区别在于,CSPEZ能够显式地考虑追击者的不确定性,从而提高规避策略的鲁棒性。
关键设计:论文的关键设计包括:1) CSBEZ的解析解推导,为后续的概率扩展奠定基础;2) 多种不确定性传播方法的选择和实现,包括蒙特卡罗抽样(计算量大但精度高)、线性化和二次近似(计算效率高但精度可能较低)、以及神经网络回归(可以学习复杂的非线性关系);3) 将CSPEZ作为约束条件集成到轨迹优化问题中,确保生成的轨迹能够有效规避风险。具体参数设置和损失函数取决于所使用的轨迹优化算法。
🖼️ 关键图片

📊 实验亮点
论文通过实验评估了不同不确定性传播方法(蒙特卡罗、线性化、二次近似、神经网络)在计算CSPEZ时的准确性和计算成本。实验结果表明,蒙特卡罗方法精度最高,但计算量最大;线性化和二次近似计算效率高,但精度较低;神经网络回归可以在精度和计算效率之间取得较好的平衡。此外,实验还验证了将CSPEZ约束集成到轨迹优化算法中能够有效生成安全轨迹。
🎯 应用场景
该研究成果可应用于无人机避障、自主车辆导航、机器人运动规划等领域,尤其是在对抗环境中,能够帮助智能体规划更安全的路径,降低被捕获或攻击的风险。通过量化不确定性带来的风险,可以提升系统的鲁棒性和可靠性,具有重要的实际应用价值和军事意义。
📄 摘要(原文)
Curve-straight probabilistic engagement zones (CSPEZ) quantify the spatial regions an evader should avoid to reduce capture risk from a turn-rate-limited pursuer following a curve-straight path with uncertain parameters including position, heading, velocity, range, and maximum turn rate. This paper presents methods for generating evader trajectories that minimize capture risk under such uncertainty. We first derive an analytic solution for the deterministic curve-straight basic engagement zone (CSBEZ), then extend this formulation to a probabilistic framework using four uncertainty-propagation approaches: Monte Carlo sampling, linearization, quadratic approximation, and neural-network regression. We evaluate the accuracy and computational cost of each approximation method and demonstrate how CSPEZ constraints can be integrated into a trajectory-optimization algorithm to produce safe paths that explicitly account for pursuer uncertainty.