An Integrated System for WEEE Sorting Employing X-ray Imaging, AI-based Object Detection and Segmentation, and Delta Robot Manipulation
作者: Panagiotis Giannikos, Lampis Papakostas, Evangelos Katralis, Panagiotis Mavridis, George Chryssinas, Myrto Inglezou, Nikolaos Panagopoulos, Antonis Porichis, Athanasios Mastrogeorgiou, Panagiotis Chatzakos
分类: cs.RO
发布日期: 2025-12-05
DOI: 10.1109/AIM64088.2025.11175846
💡 一句话要点
提出集成X射线成像、AI检测分割与Delta机器人的WEEE分拣系统
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: WEEE回收 电池分拣 X射线成像 目标检测 图像分割 Delta机器人 自动化系统
📋 核心要点
- 现有WEEE电池分拣系统在准确识别和分拣不同类型WEEE中的电池方面存在不足,缺乏全自动解决方案。
- 该论文提出了一种集成X射线成像、AI目标检测与分割以及Delta机器人操作的WEEE电池分拣系统。
- 该方法在NVIDIA Isaac Sim仿真环境和真实环境中进行了验证,证明了其有效性。
📝 摘要(中文)
随着电池使用量的快速增长和自然资源的日益有限,电池回收变得越来越重要。此外,随着电池能量密度的不断提高,回收过程中的不当操作会带来严重的安全隐患,包括回收设施发生火灾的风险。目前已提出了许多用于从WEEE回收线上检测和移除电池的系统,包括基于X射线和RGB的视觉检测方法,这些方法通常由人工智能驱动的目标检测模型(例如Mask R-CNN、YOLO、ResNets)驱动。尽管在优化检测技术和模型修改方面取得了进展,但尚未实现能够准确识别和分拣各种WEEE类型电池的全自动解决方案。为了应对这些挑战,我们提出了一种新颖的方法,该方法集成了专门的X射线透射双能成像子系统和先进的预处理算法,从而能够进行高对比度图像重建,从而有效区分WEEE中的高密度和低密度材料。设备沿着传送带移动通过高分辨率X射线成像系统,YOLO和U-Net模型在其中精确地检测和分割包含电池的物品。然后,智能跟踪和位置估计算法引导配备吸盘夹具的Delta机器人选择性地提取并正确丢弃目标设备。该方法在NVIDIA Isaac Sim中开发的光真实感仿真环境和真实设置中得到了验证。
🔬 方法详解
问题定义:论文旨在解决废弃电子电气设备(WEEE)中电池的自动分拣问题。现有方法,如基于RGB图像的视觉检测,在复杂背景和遮挡情况下表现不佳。X射线成像虽然可以穿透遮挡,但如何有效利用X射线图像进行精确的电池检测和分割仍然是一个挑战。此外,缺乏一个集成的系统,能够将检测结果与机器人操作相结合,实现全自动的分拣。
核心思路:论文的核心思路是利用X射线双能成像技术获取WEEE内部结构信息,结合深度学习模型进行精确的电池检测和分割,并通过Delta机器人实现自动抓取和分拣。这种方法结合了X射线成像的穿透能力和深度学习的强大特征提取能力,能够有效地解决复杂WEEE环境下的电池分拣问题。
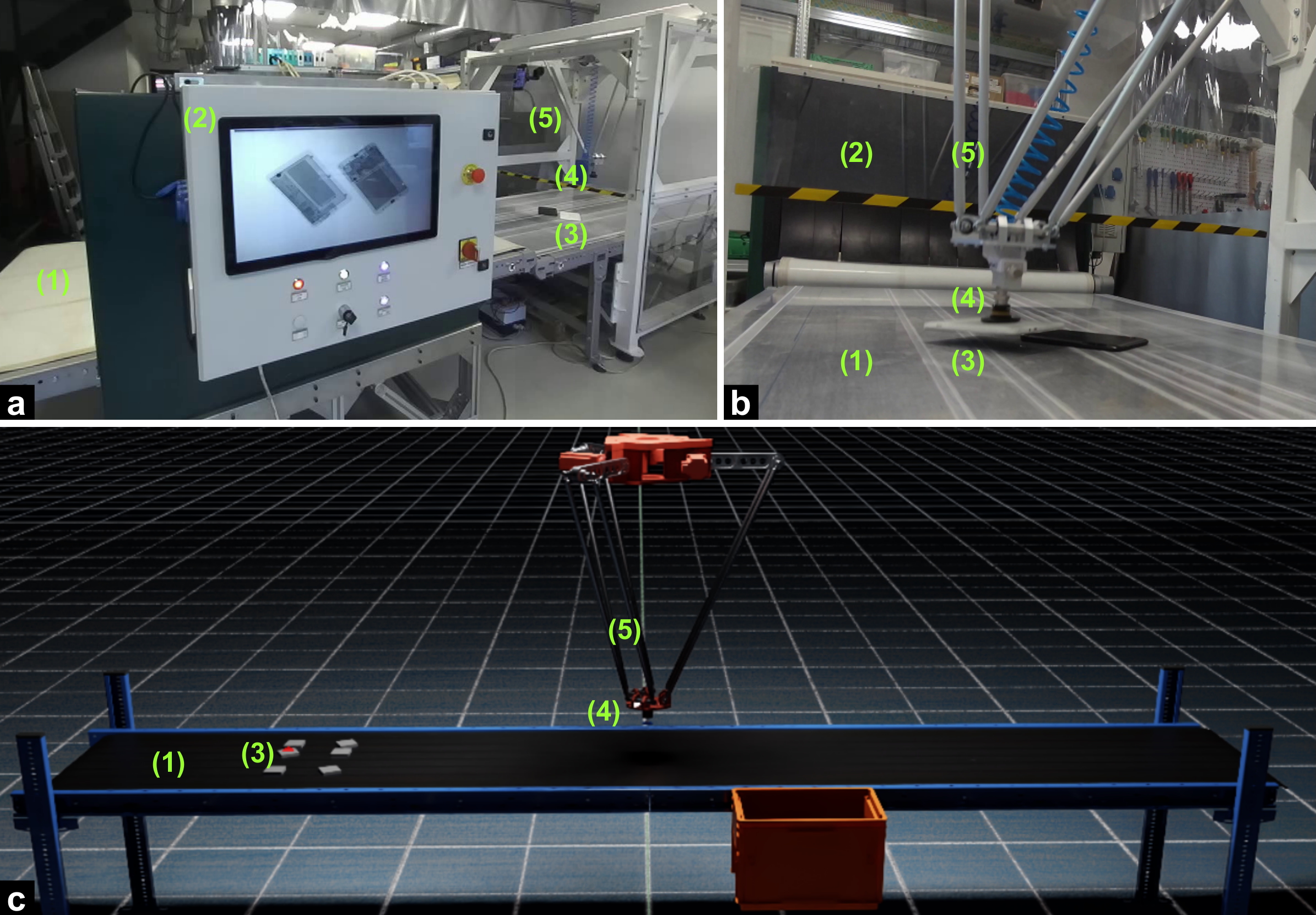
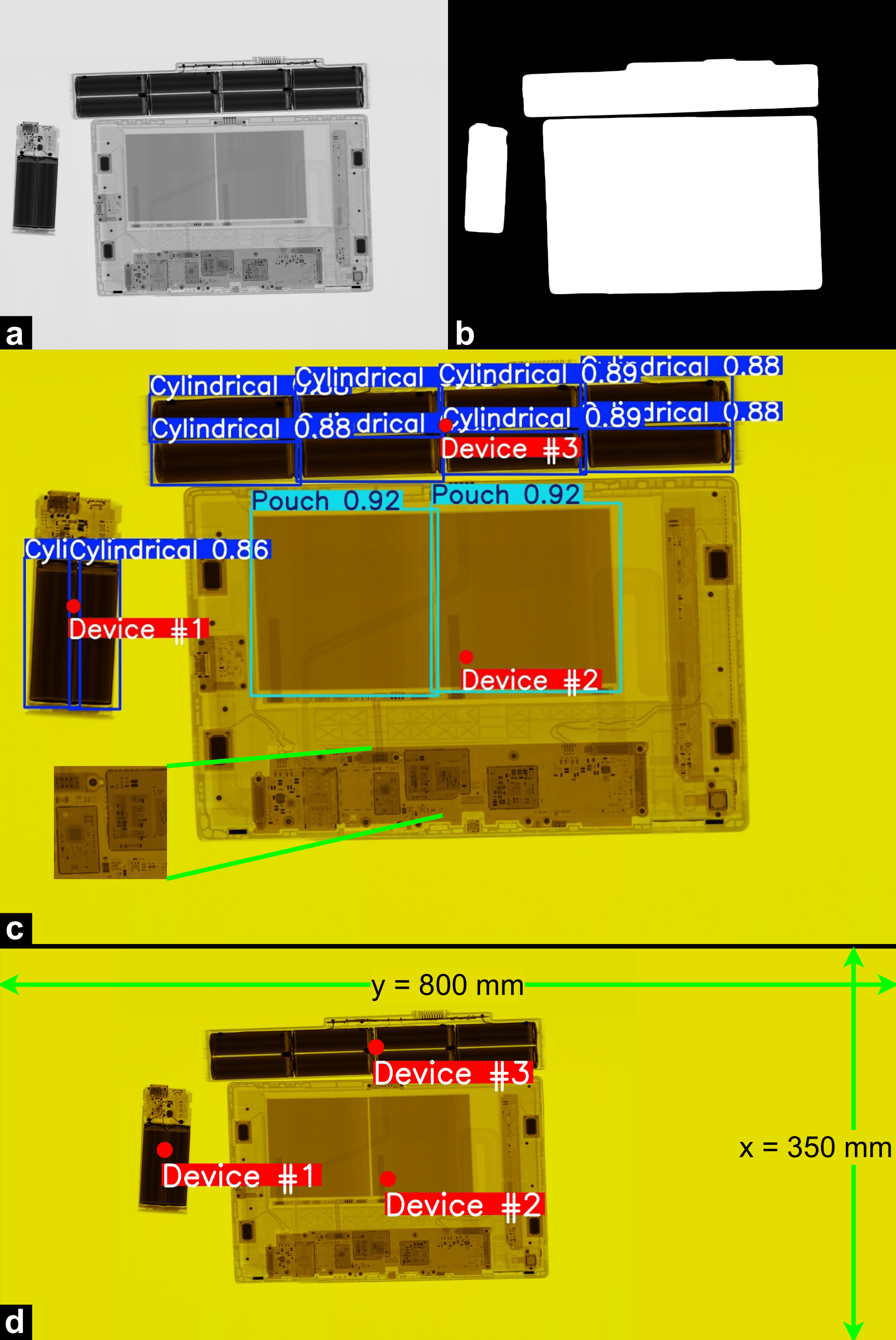
技术框架:该系统的整体架构包括以下几个主要模块:1) X射线双能成像子系统:用于获取WEEE的X射线图像。2) 图像预处理模块:用于增强图像对比度,突出电池特征。3) 基于YOLO和U-Net的电池检测与分割模块:用于精确识别和分割X射线图像中的电池。4) 智能跟踪和位置估计模块:用于跟踪目标物体的位置,并为机器人提供抓取坐标。5) Delta机器人操作模块:根据位置信息,控制机器人抓取并分拣电池。
关键创新:该论文的关键创新在于:1) 集成了X射线双能成像技术,能够有效区分WEEE中的不同材料。2) 结合YOLO和U-Net模型,实现了高精度的电池检测和分割。3) 构建了一个完整的自动化系统,将图像处理、目标检测和机器人操作相结合,实现了WEEE电池的自动分拣。4) 在NVIDIA Isaac Sim中进行仿真验证,降低了实际部署的风险。
关键设计:X射线成像系统采用双能成像技术,通过比较不同能量X射线的吸收差异来区分材料。图像预处理算法旨在增强图像对比度,例如直方图均衡化。YOLO模型用于快速检测包含电池的物体,U-Net模型用于精确分割电池区域。Delta机器人配备吸盘夹具,能够稳定地抓取目标物体。智能跟踪算法用于补偿传送带运动带来的位置变化。
🖼️ 关键图片
📊 实验亮点
论文在NVIDIA Isaac Sim仿真环境和真实环境中验证了所提出的方法。虽然摘要中没有给出具体的性能数据,但强调了该系统能够精确地检测和分割电池,并引导Delta机器人进行自动抓取和分拣。仿真结果表明,该系统具有良好的可行性和潜力,为实际部署奠定了基础。
🎯 应用场景
该研究成果可应用于WEEE回收处理厂,实现废旧电子产品中电池的自动分拣,提高回收效率和安全性。该系统能够减少人工分拣的需求,降低工人接触有害物质的风险,并提高电池的回收率,从而促进环境保护和资源可持续利用。未来,该技术还可以扩展到其他类型废弃物的分拣。
📄 摘要(原文)
Battery recycling is becoming increasingly critical due to the rapid growth in battery usage and the limited availability of natural resources. Moreover, as battery energy densities continue to rise, improper handling during recycling poses significant safety hazards, including potential fires at recycling facilities. Numerous systems have been proposed for battery detection and removal from WEEE recycling lines, including X-ray and RGB-based visual inspection methods, typically driven by AI-powered object detection models (e.g., Mask R-CNN, YOLO, ResNets). Despite advances in optimizing detection techniques and model modifications, a fully autonomous solution capable of accurately identifying and sorting batteries across diverse WEEEs types has yet to be realized. In response to these challenges, we present our novel approach which integrates a specialized X-ray transmission dual energy imaging subsystem with advanced pre-processing algorithms, enabling high-contrast image reconstruction for effective differentiation of dense and thin materials in WEEE. Devices move along a conveyor belt through a high-resolution X-ray imaging system, where YOLO and U-Net models precisely detect and segment battery-containing items. An intelligent tracking and position estimation algorithm then guides a Delta robot equipped with a suction gripper to selectively extract and properly discard the targeted devices. The approach is validated in a photorealistic simulation environment developed in NVIDIA Isaac Sim and on the real setup.