Wake Vectoring for Efficient Morphing Flight
作者: Ioannis Mandralis, Severin Schumacher, Morteza Gharib
分类: cs.RO
发布日期: 2025-12-04
💡 一句话要点
提出被动尾流导向机制,提升变体飞行器形态转换时的推力效率
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 变体飞行器 形态转换 尾流导向 推力恢复 被动控制
📋 核心要点
- 变体飞行器在形态转换时,倾斜推进器会导致垂直推力下降,影响稳定性和控制。
- 论文提出一种被动尾流导向机制,通过内部导流板重定向旋翼尾流,恢复损失的推力。
- 实验表明,该机制在特定配置下可恢复高达40%的垂直推力,提升悬停和机动能力。
📝 摘要(中文)
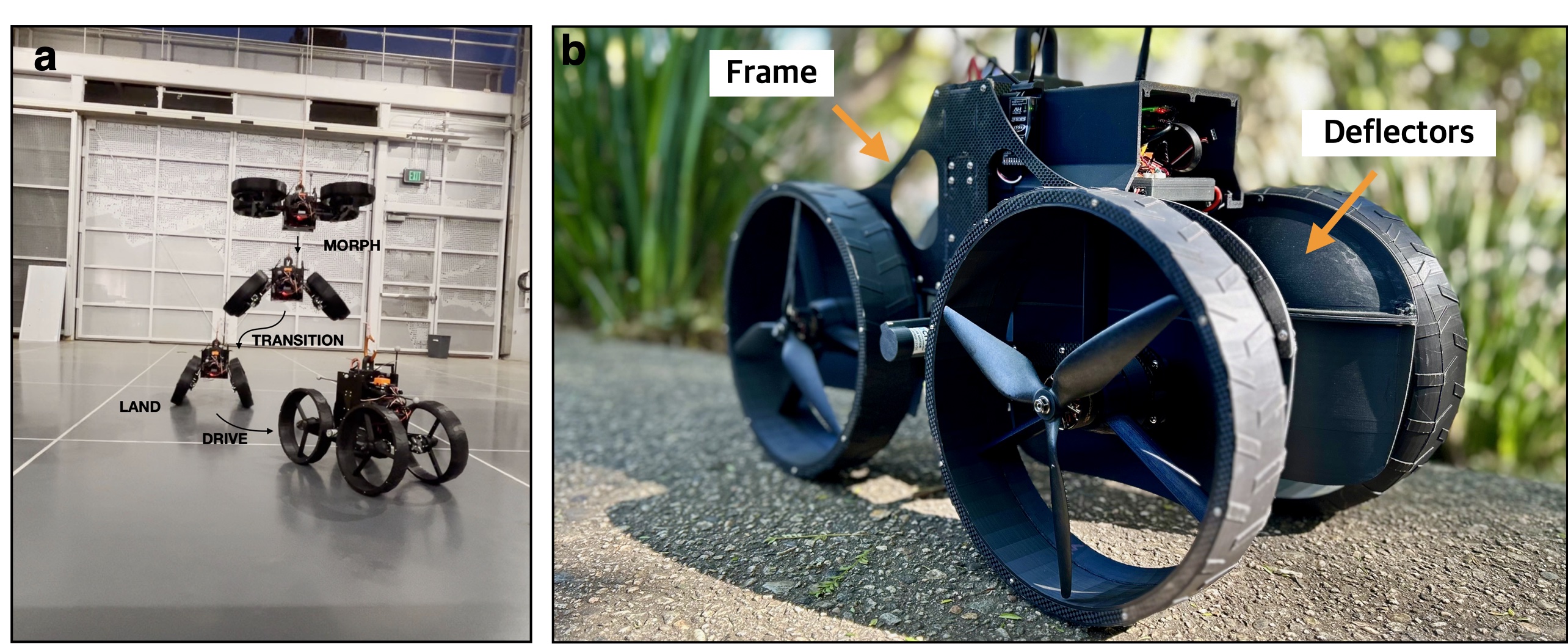
变体飞行机器人具有改变自身形态的潜力,从而实现复杂环境导航、栖息以及空中和地面运动之间的无缝转换。然而,飞行中形态重构面临着严峻的空气动力学挑战:倾斜推进器以实现形状改变会降低垂直推力,从而削弱稳定性和控制能力。本文介绍了一种被动尾流导向机制,用于恢复形态转换期间损失的推力。该机制集成到一种新型机器人系统——空中变体变形机器人(ATMO)中,通过内部导流板拦截并向下重定向旋翼尾流,从而被动地引导原本会被浪费的气流动量。这种无需电子设备的解决方案在通常无法产生有效推力的配置中,实现了高达40%的垂直推力恢复,从而大大扩展了变形过程中的悬停和机动能力。研究结果为变体飞行机器人设计指明了一个新方向,即受火箭和飞机推力矢量控制启发的被动空气动力学结构,能够在不增加机械复杂性的情况下实现高效、敏捷的飞行。
🔬 方法详解
问题定义:变体飞行器在空中进行形态转换时,为了改变形状通常需要倾斜推进器。然而,这种倾斜会导致垂直方向的推力损失,从而影响飞行器的稳定性和控制能力。现有的解决方案通常依赖于增加推进器的数量或者提高推进器的功率,但这会增加飞行器的重量和能耗,降低其效率和续航能力。因此,如何在形态转换过程中有效地恢复损失的推力,是变体飞行器设计中的一个关键问题。
核心思路:本文的核心思路是通过被动的方式,将原本会被浪费的旋翼尾流进行导向,使其产生额外的垂直推力。这种方法不需要额外的能量输入,而是利用飞行器自身的空气动力学特性,实现推力的恢复。其设计灵感来源于火箭和飞机上的推力矢量控制技术,但将其简化为一种被动的结构,从而降低了系统的复杂性和成本。
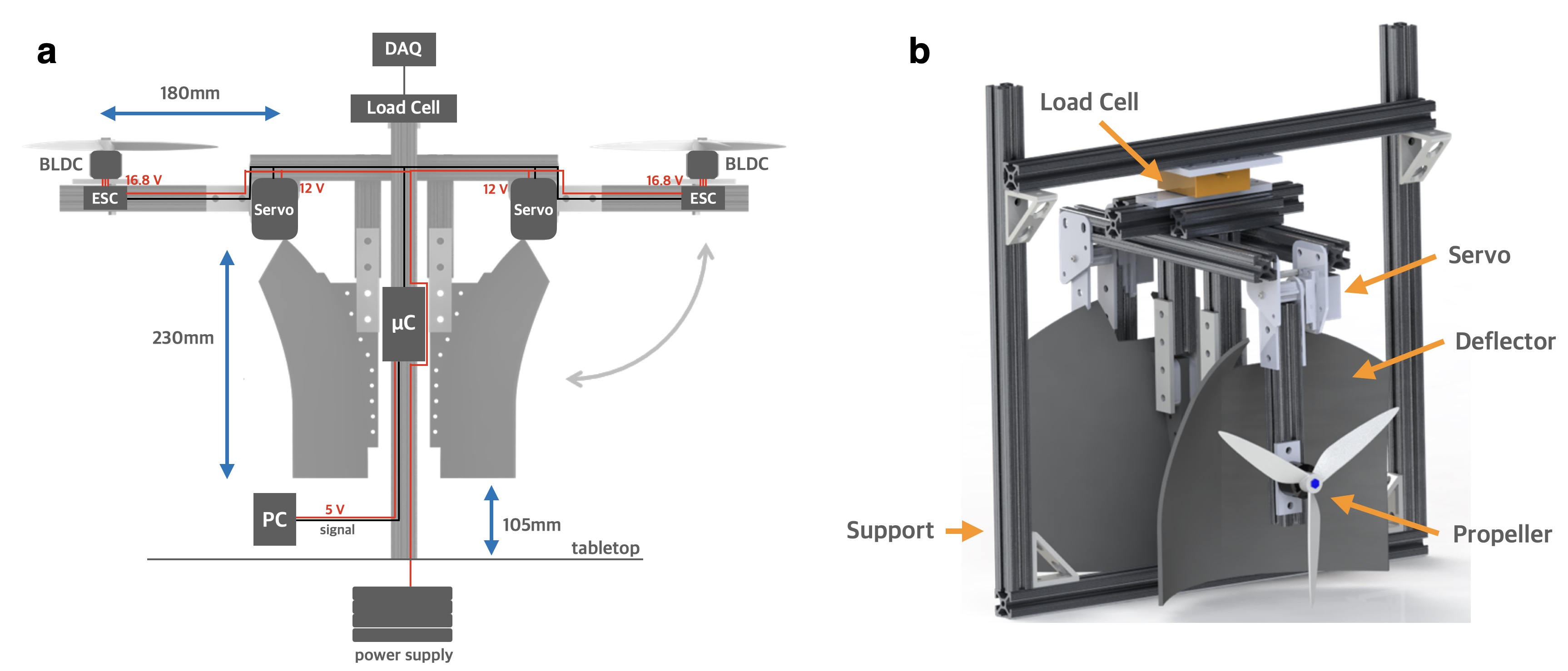
技术框架:该研究提出的空中变体变形机器人(ATMO)集成了被动尾流导向机制。ATMO的整体架构包括:多个旋翼推进器,用于提供飞行所需的推力;内部导流板,用于拦截和重定向旋翼尾流;以及控制系统,用于协调各个推进器的工作,实现飞行器的姿态控制和运动规划。在形态转换过程中,控制系统会根据飞行器的形状和姿态,调整导流板的角度,从而实现对尾流的有效导向。
关键创新:该论文最重要的技术创新点在于提出了被动尾流导向机制。与传统的推力矢量控制技术相比,该机制不需要额外的执行机构和控制系统,而是通过巧妙的结构设计,实现了对尾流的被动控制。这种方法不仅降低了系统的复杂性和成本,还提高了系统的可靠性和鲁棒性。此外,该研究还将该机制集成到了一种新型的变体飞行机器人中,验证了其在实际应用中的可行性和有效性。
关键设计:内部导流板的设计是该机制的关键。导流板的角度和形状需要根据旋翼的尺寸、转速以及飞行器的形状进行优化,以实现最佳的尾流导向效果。此外,导流板的材料也需要具有足够的强度和刚度,以承受旋翼尾流的冲击。论文中并未详细描述导流板的具体参数设置,但强调了其对整体性能的重要性。损失函数和网络结构等技术细节在该论文中未涉及,因为该方法主要依赖于被动的空气动力学结构。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该被动尾流导向机制在特定配置下能够恢复高达40%的垂直推力,显著提升了ATMO在形态转换过程中的悬停和机动能力。这一结果表明,通过巧妙的空气动力学设计,可以在不增加机械复杂性的情况下,有效地提高变体飞行器的性能。与没有采用尾流导向机制的飞行器相比,ATMO在形态转换过程中具有更强的稳定性和控制能力。
🎯 应用场景
该研究成果可应用于多种场景,例如:复杂环境下的自主导航,使得飞行器能够在狭窄空间内灵活穿梭;灾难救援,变体飞行器可以根据环境变化调整自身形态,进入传统飞行器无法到达的区域;以及物流运输,通过改变形态适应不同的载荷和飞行需求。此外,该技术还可以推广到其他类型的飞行器设计中,例如垂直起降飞行器和倾转旋翼飞行器,提高其飞行效率和机动性。
📄 摘要(原文)
Morphing aerial robots have the potential to transform autonomous flight, enabling navigation through cluttered environments, perching, and seamless transitions between aerial and terrestrial locomotion. Yet mid-flight reconfiguration presents a critical aerodynamic challenge: tilting propulsors to achieve shape change reduces vertical thrust, undermining stability and control authority. Here, we introduce a passive wake vectoring mechanism that recovers lost thrust during morphing. Integrated into a novel robotic system, Aerially Transforming Morphobot (ATMO), internal deflectors intercept and redirect rotor wake downward, passively steering airflow momentum that would otherwise be wasted. This electronics-free solution achieves up to a 40% recovery of vertical thrust in configurations where no useful thrust would otherwise be produced, substantially extending hover and maneuvering capabilities during transformation. Our findings highlight a new direction for morphing aerial robot design, where passive aerodynamic structures, inspired by thrust vectoring in rockets and aircraft, enable efficient, agile flight without added mechanical complexity.