Contact-Implicit Modeling and Simulation of a Snake Robot on Compliant and Granular Terrain
作者: Haroon Hublikar
分类: cs.RO
发布日期: 2025-12-04
💡 一句话要点
针对蛇形机器人在复杂地形运动,提出接触隐式建模与仿真框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 蛇形机器人 接触隐式建模 土壤接触模型 离散单元法 复杂地形 运动仿真 机器人运动规划
📋 核心要点
- 现有蛇形机器人运动建模方法难以兼顾刚性、柔性和颗粒状地形,缺乏统一的仿真框架。
- 采用接触隐式公式处理摩擦,集成Chrono的SCM和DEM引擎,分别模拟连续介质和离散颗粒地形。
- 实验验证了该框架在不同地形下的有效性,并揭示了地形变形对运动性能的影响。
📝 摘要(中文)
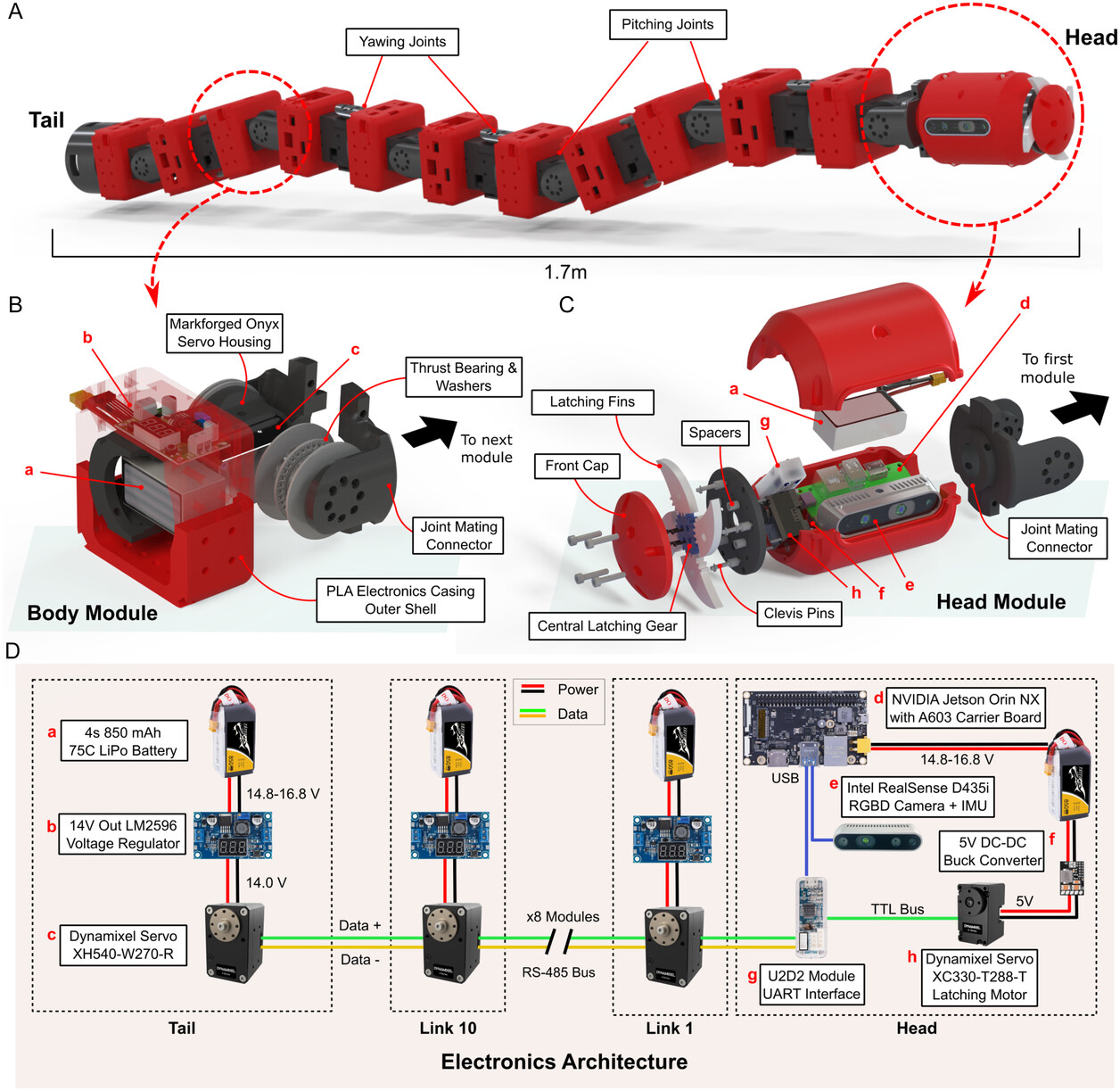
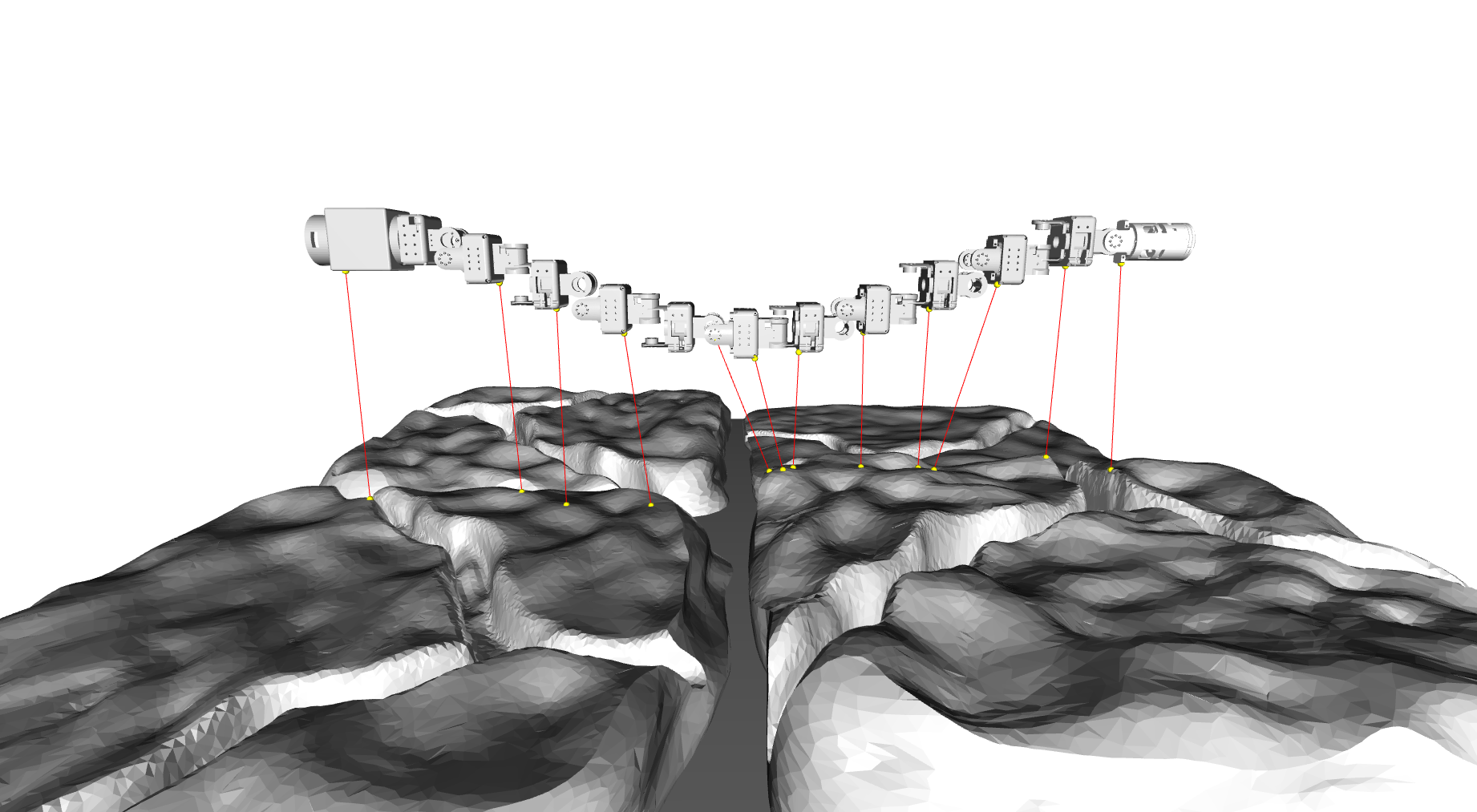
本论文提出了一个统一的建模与仿真框架,用于分析COBRA蛇形机器人在刚性、柔性和颗粒状地形上的侧向运动和翻滚运动。采用接触隐式公式来模拟侧向运动过程中的分布式摩擦相互作用,并通过MATLAB Simscape仿真以及在刚性地面和松散沙地上的物理实验进行了验证。为了捕捉地形变形的影响,集成了Project Chrono的土壤接触模型(SCM)与铰接多体动力学,从而能够预测滑移、沉陷和载荷重新分布,这些因素会降低在可变形基底上的步幅效率。对于陡坡上的高能量滚动运动,使用Chrono DEM引擎来模拟粒子解析的颗粒相互作用,揭示了刚性模型无法捕捉到的土壤破坏、间歇性抬升和能量耗散机制。总而言之,这些方法涵盖了实时控制导向的仿真和高保真颗粒物理。结果表明,刚性地面模型可以提供准确的短时程运动预测,而连续介质和基于粒子的地形建模对于在柔软和高度动态环境中进行可靠的移动性分析是必要的。这项工作建立了一个分层仿真流程,从而推进了在具有挑战性的非结构化环境中运行的机器人的鲁棒的、地形感知的运动。
🔬 方法详解
问题定义:蛇形机器人在复杂地形(刚性、柔性、颗粒状)上的运动建模与仿真是一个挑战。传统的刚性地面模型无法准确预测在可变形地形上的运动,而高精度的颗粒物理模型计算成本又过高,难以应用于实时控制。因此,需要一个统一的框架,能够在不同地形下进行准确且高效的仿真。
核心思路:本论文的核心思路是采用分层建模的方法,根据地形的特性选择合适的模型。对于刚性地面,采用接触隐式公式进行建模;对于柔性地形,集成Project Chrono的土壤接触模型(SCM);对于颗粒状地形,使用Chrono DEM引擎。这样可以在保证仿真精度的同时,提高计算效率。
技术框架:该框架包含以下几个主要模块:1) 接触隐式建模模块,用于模拟蛇形机器人在刚性地面上的运动;2) 土壤接触模型(SCM)集成模块,用于模拟蛇形机器人在柔性地形上的运动;3) 离散单元法(DEM)仿真模块,用于模拟蛇形机器人在颗粒状地形上的运动。这些模块可以根据地形的特性进行选择和组合,从而实现对蛇形机器人在复杂地形上的运动进行仿真。
关键创新:该论文的关键创新在于提出了一个统一的建模与仿真框架,能够处理刚性、柔性和颗粒状地形。通过集成不同的模型,该框架可以在保证仿真精度的同时,提高计算效率。此外,该论文还揭示了地形变形对蛇形机器人运动性能的影响。
关键设计:在接触隐式建模模块中,采用了基于摩擦锥的接触模型。在SCM集成模块中,使用了Project Chrono提供的土壤接触模型,并根据具体的土壤参数进行了调整。在DEM仿真模块中,使用了Chrono DEM引擎,并对颗粒的大小、形状和材料属性进行了设置。
🖼️ 关键图片

📊 实验亮点
通过MATLAB Simscape仿真和物理实验验证了接触隐式公式在刚性地面和松散沙地上的有效性。集成了Project Chrono的土壤接触模型(SCM),能够预测滑移、沉陷和载荷重新分布。使用Chrono DEM引擎模拟颗粒相互作用,揭示了土壤破坏、间歇性抬升和能量耗散机制。
🎯 应用场景
该研究成果可应用于搜救机器人、勘探机器人等领域,使其能够在复杂地形环境下进行自主导航和运动控制。通过仿真预测不同地形下的运动性能,可以优化机器人设计和控制策略,提高其在实际应用中的可靠性和效率。此外,该研究还可以为其他类型的移动机器人提供参考。
📄 摘要(原文)
This thesis presents a unified modeling and simulation framework for analyzing sidewinding and tumbling locomotion of the COBRA snake robot across rigid, compliant, and granular terrains. A contact-implicit formulation is used to model distributed frictional interactions during sidewinding, and validated through MATLAB Simscape simulations and physical experiments on rigid ground and loose sand. To capture terrain deformation effects, Project Chrono's Soil Contact Model (SCM) is integrated with the articulated multibody dynamics, enabling prediction of slip, sinkage, and load redistribution that reduce stride efficiency on deformable substrates. For high-energy rolling locomotion on steep slopes, the Chrono DEM Engine is used to simulate particle-resolved granular interactions, revealing soil failure, intermittent lift-off, and energy dissipation mechanisms not captured by rigid models. Together, these methods span real-time control-oriented simulation and high-fidelity granular physics. Results demonstrate that rigid-ground models provide accurate short-horizon motion prediction, while continuum and particle-based terrain modeling becomes necessary for reliable mobility analysis in soft and highly dynamic environments. This work establishes a hierarchical simulation pipeline that advances robust, terrain-aware locomotion for robots operating in challenging unstructured settings.